本文主要是介绍【深度学习基础】详解Pytorch搭建CNN卷积神经网络LeNet-5实现手写数字识别,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
写在开头
一、CNN的原理
1. 概述
2. 卷积层
内参数(卷积核本身)
外参数(填充和步幅)
输入与输出的尺寸关系
3. 多通道问题
多通道输入
多通道输出
4. 池化层
平均汇聚
最大值汇聚
二、手写数字识别
1. 任务描述和数据集加载
2. 网络结构(LeNet-5)
3. 模型训练
4. 模型测试
5. 直观显示预测结果
写在最后
写在开头
本文将将介绍如何使用PyTorch框架搭建卷积神经网络(CNN)模型。简易介绍卷积神经网络的原理,并实现模型的搭建、数据集加载、模型训练、测试、网络的保存等。实现机器学习领域的Hello world——手写数字识别。本文的讲解参考了B站两位up主:爆肝杰哥、炮哥带你学。有关Pytorch环境配置和CNN具体原理大家可以自行查阅资料,本文多数图片也来自于爆肝杰哥的讲解。这里也放上两位up主的视频链接:
从0开始撸代码--手把手教你搭建LeNet-5网络模型_哔哩哔哩_bilibili
Python深度学习:安装Anaconda、PyTorch(GPU版)库与PyCharm_哔哩哔哩_bilibili
本文使用的PyTorch为1.12.0版本,Numpy为1.21版本,相近的版本语法差异很小。有关数组的数据结构教程、神经网络的基本原理(前向传播/反向传播)、神经网络作为“函数模拟器”直观感受、深度神经网络的实现DNN详见本专栏的前三篇文章,链接如下:
【深度学习基础】NumPy数组库的使用-CSDN博客
【深度学习基础】用PyTorch从零开始搭建DNN深度神经网络_如何搭建一个深度学习神经网络dnn pytorch-CSDN博客
【深度学习基础】使用Pytorch搭建DNN深度神经网络与手写数字识别_dnn网络模型 代码-CSDN博客
基于深度神经网络DNN实现的手写数字识别,将灰度图像转换后的二维数组展平到一维,将一维的784个特征作为模型输入。在“展平”的过程中必然会失去一些图像的形状结构特征,因此基于DNN的实现方式并不能很好的利用图像的二维结构特征,而卷积神经网络CNN对于处理图像的位置信息具有一定的优势。因此卷积神经网络经常被用于图像识别/处理领域。下面我们将对CNN进行具体介绍。
一、CNN的原理
1. 概述
在上一篇博客介绍的深度神经网络DNN中,网络的每一层神经元相互直接都有链接,每一层都是全连接层,我们的目标就是训练这个全连接层的权重w和偏执b,最终得到预测效果良好的网络结构。
DNN的全连接层对应于CNN中的卷积层,而池化层(汇聚)其实与激活函数的作用类似。CNN中完整的卷积层的结构是:卷积-激活函数-池化(汇聚),其中池化层也有时可以省略。一个卷积神经网络的结构如下:
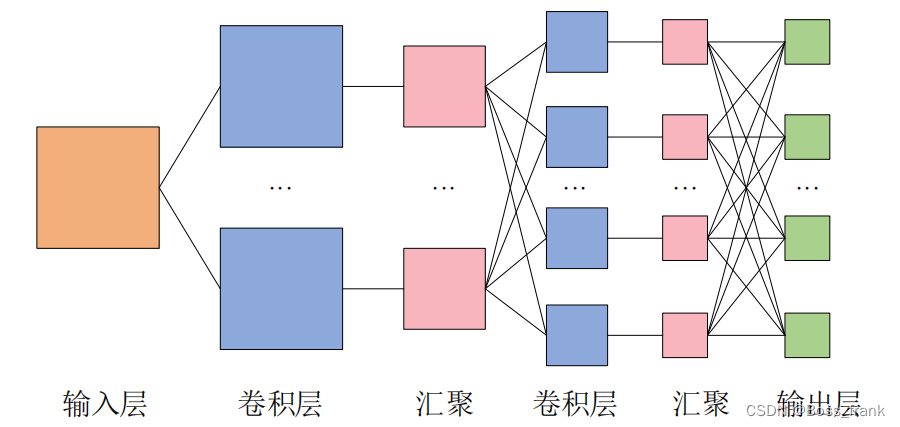
如上图所示,CNN的优势在于可以处理多为输入数据,并同样以多维数据的形式输出至下一层,保留了更多的空间信息特征。而DNN却只能将多维数据展平成一维数据,必然会损失一些空间特征。
2. 卷积层
内参数(卷积核本身)
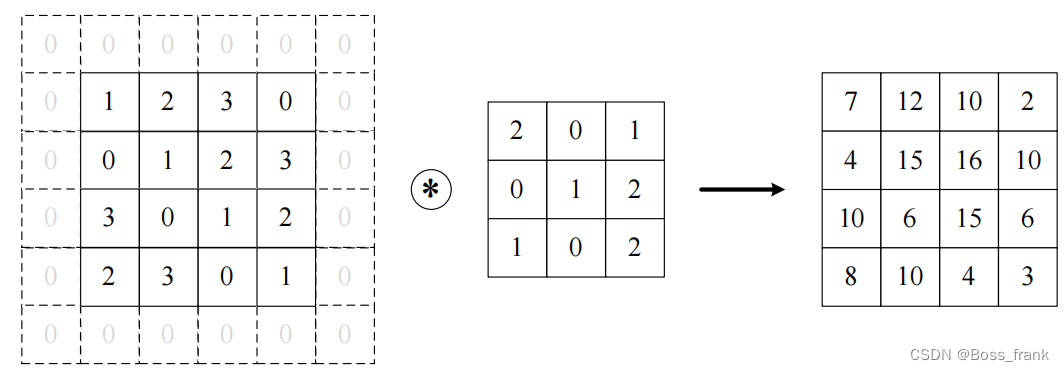
CNN中的卷积层和DNN中的全连接层是平级关系,在DNN中,我们训练的内参数是全连接层的权重w和偏置b,CNN也类似,CNN训练的是卷积核,也就相当于包含了权重和偏置两个内部参数。下面我们首先描述什么是卷积运算。当输入数据进入卷积层后,输入数据会与卷积核进行卷积运算,运算方法如下图所示:
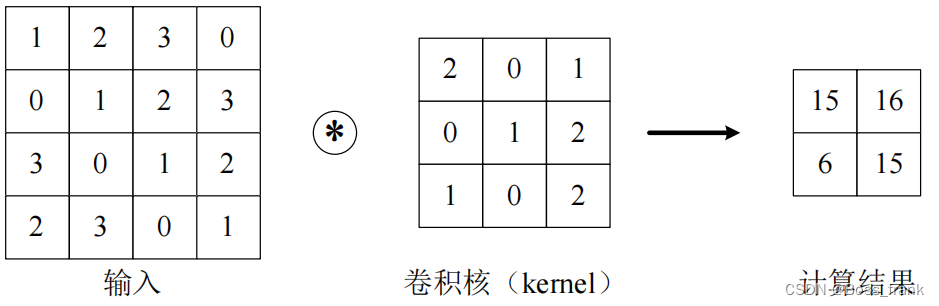
输入一个多维数据(上图为二维),与卷积核进行运算,即输入中与卷积核形状相同的部分,分别与卷积核进行逐个元素相乘再相加。例如计算结果中坐上角的15是根据如下过程计算得到的:
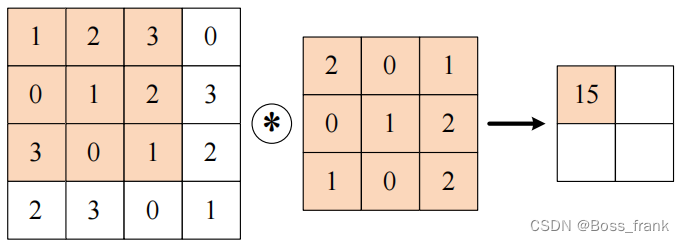
逐个元素相乘再相加,即:
1 * 2 + 2 * 0 + 3* 1 + 0 * 0 + 1 * 1 + 2 * 2 + 3 * 1 + 0 * 0 + 1 * 2 = 15
卷积核本身相当于权重,再卷积运算的过程中也可以存在偏置,如下:
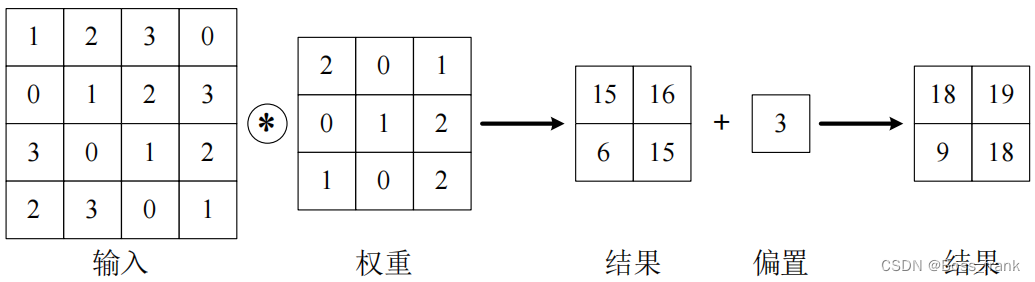
卷积核(即CNN的权重和偏置)本身为内参数,(具体里面的数字)是我们通过训练得出的,我们写代码的时候只要关注一些外部设定的参数即可。下面我们将介绍一些外参数。
外参数(填充和步幅)
填充(padding)
显然,只要卷积核的大小>1*1,必然会导致图像越卷越小,为了防止输入经过多个卷积层后变得过小,可以在发生卷积层之前,先向输入图像的外围填入固定的数据(比如0),这个步骤称之为填充,如下图:
在我们使用Pytorch搭建卷积层的时候,需要在对应的接口中添加这个padding参数,向上图中这种情况,相当于在3*3的卷积核外围添加了“一圈”,则padding = 1,卷积层的接口中就要这样写:
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=3, paddding=1)
参数in_channels和out_channels是对应于这个卷积层输入和输出的通道数参数,这里我们先放一放。
步幅(stride)
步幅指的是使用卷积核的位置间隔,即输入中参与运算的那个范围每次移动的距离。前面几个示意图中的步幅均为1,即每次移动一格,如果设置stride=2,kernel_size=2,则效果如下:
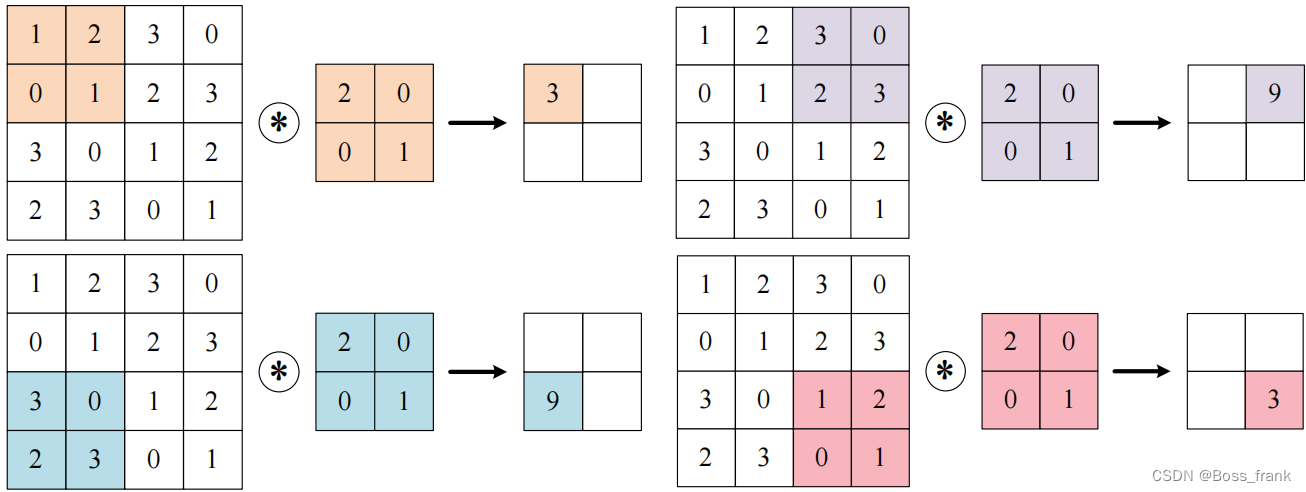
此时需要在卷积层接口中添加参数stride=2。
输入与输出的尺寸关系
综上所述,结合外参数(步幅、填充)和内参数(卷积核),可以看出如下规律:
卷积核越大,输出越小。
步幅越大,输出越小。
填充越大,输出越大。
用公式表示定量关系:
如果输入和卷积核均为方阵,设输入尺寸为W*W,输出尺寸为N*N,卷积核尺寸为F*F,填充的圈数为P,步幅为S,则有关系:
这个关系大家要重点掌握,也可以自己推导一下,并不复杂。如果输入和卷积核不为方阵,设输入尺寸是H*W,输出尺寸是OH*OW,卷积核尺寸为FH*FW,填充为P,步幅为S,则输出尺寸OH*OW的计算公式是:
3. 多通道问题
多通道输入
对于手写数字识别这种灰度图像,可以视为仅有(高*长)二维的输入。然而,对于彩色图像,每一个像素点都相当于是RGB的三个值的组合,因此对于彩色的图像输入,除了高*长两个维度外,还有第三个维度——通道,即红、绿、蓝三个通道,也可以视为3个单通道的二维图像的混合叠加。
当输入数据仅为二维时,卷积层的权重往往被称作卷积核(Kernel);
当输入数据为三维或更高时,卷积层的权重往往被称作滤波器(Filter)。
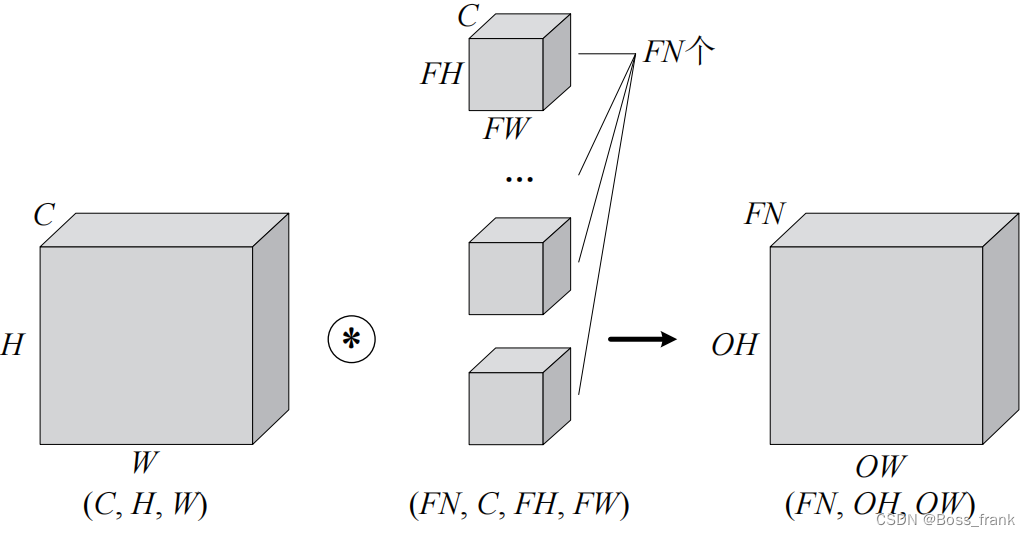
对于多通道输入,输入数据和滤波器的通道数必须保持一致。这样会导致输出结果降维成二维,如下图:
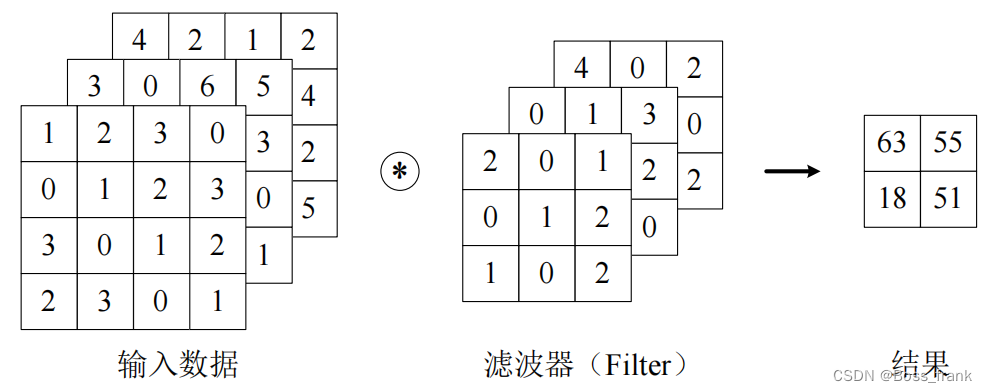
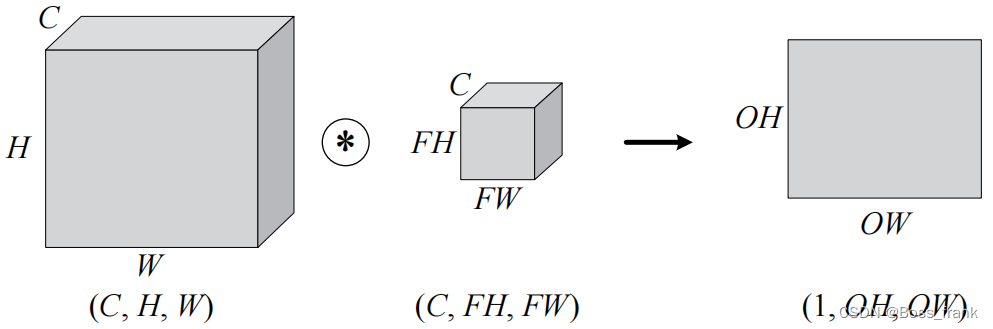
对形状进行一下抽象,则输入数据C*H*W和滤波器C*FH*FW都是长方体,结果是一个长方形1*OH*OW,注意C,H,W是固定的顺序,通道数要写在最前。
多通道输出
如果要实现多通道输出,那么就需要多个滤波器,让三维输入与多个滤波器进行卷积,就可以实现多通道输出,输出的通道数FN就是滤波器的个数FN,如下图:
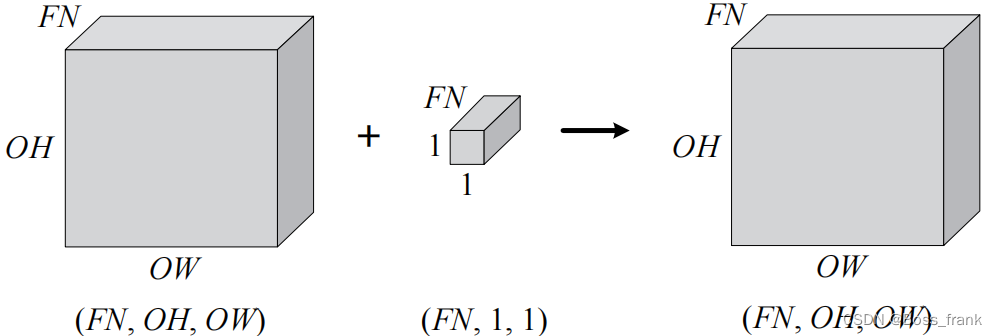
和单通道一样,卷积运算后也有偏置,如果进一步追加偏置,则结果如下:每个通道都有一个单独的偏置。
4. 池化层
池化,也叫汇聚(Pooling)。池化层通常位于卷积层之后(有时也可以不设置池化层),其作用仅仅是在一定范围内提取特征值,所以并不存在要学习的内部参数。池化仅仅对图像的高H和宽W进行特征提取,并不改变通道数C。
平均汇聚
一般有平均汇聚和最大值汇聚两种。平均汇聚如下:
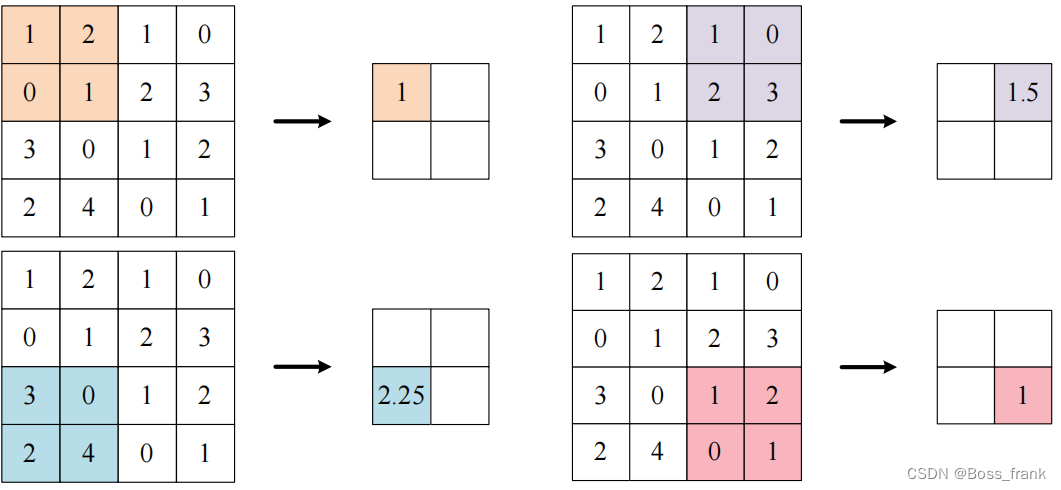
如上图,池化的窗口大小为2*2,对应的步幅为2,因此对于上图这种情况,对应的Pytorch接口如下:
nn.AvgPool2d(kernel_size=2, stride=2)
最大值汇聚
同理,如果使用最大值汇聚,如下图所示:
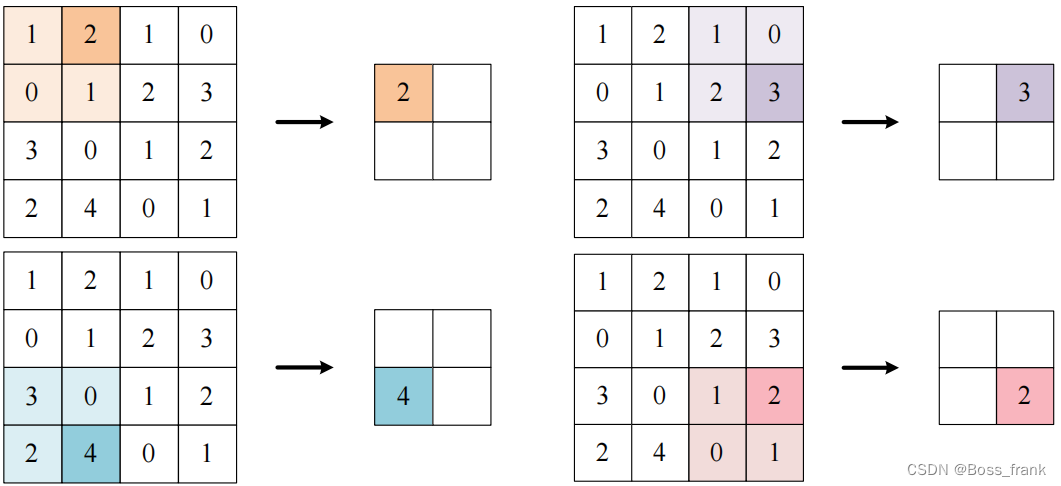
此处Pytorch函数就这么写:
nn.MaxPool2d(kernel_size=2, stride=2)
二、手写数字识别
1. 任务描述和数据集加载
此处和上一篇博客类似,详情见:
【深度学习基础】使用Pytorch搭建DNN深度神经网络与手写数字识别_dnn网络模型 代码-CSDN博客
接下来我们实现机器学习领域的Hello World——手写数字识别。使用的数据集MNIST是机器学习领域的标准数据集,其中的每一个样本都是一副二维的灰度图像,尺寸为28*28:
输入就相当于一个单通道的图像,是二维的。我们在实现的时候,要将每个样本图像转换为28*28的张量,作为输入,此处和上一篇DNN都一致。数据集则通过包torchvision中的datasets库进行下载。这里我快速给一段代码好了,详情可见上一篇博客。
import torch
from torchvision import datasets, transforms# 设定下载参数 (数据集转换参数),将图像转换为张量
data_transform = transforms.Compose([transforms.ToTensor()
])# 加载训练数据集
train_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径,读者请自行设置train=True, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)# 批次加载器,在接下来的训练中进行小批次(16批次)的载入数据,有助于提高准确度,对训练集的样本进行打乱,
train_dataloader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=16, shuffle=True)# 加载测试数据集
test_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径train=False, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)test_dataloader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=16, shuffle=True)2. 网络结构(LeNet-5)
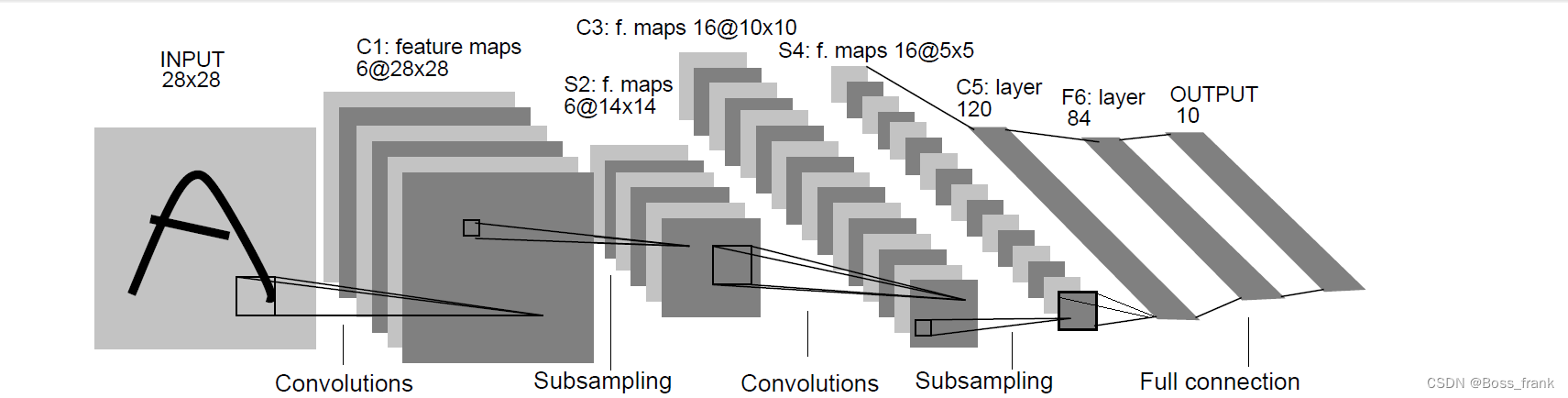
本文搭建的LeNet-5起源于1998年,在手写数字识别上非常成功。其结构如下:
再列一个表格,具体结构如下:
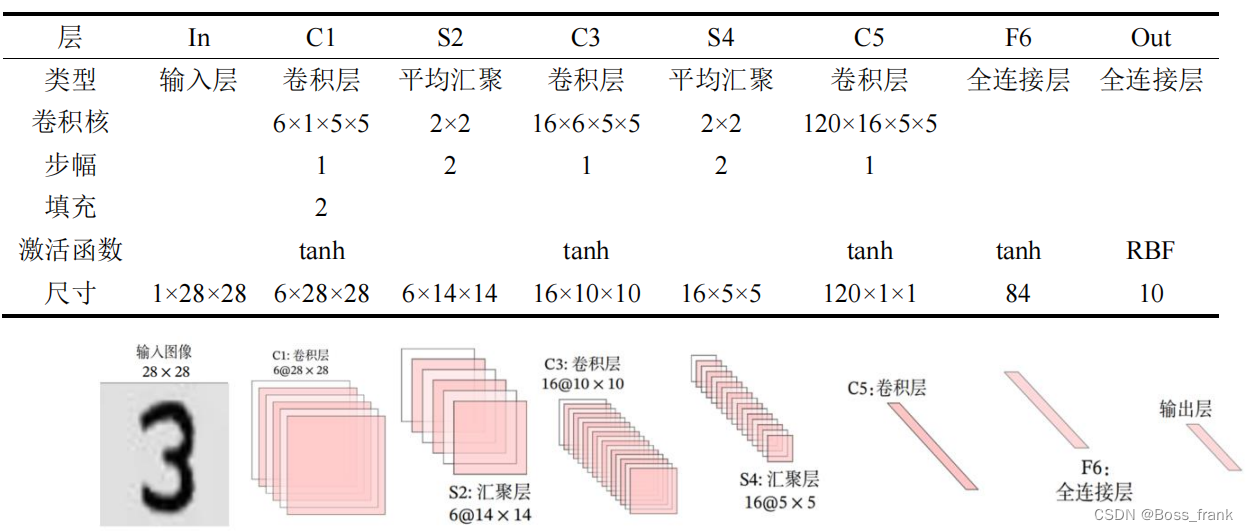 注:输出层的激活函数目前已经被Softmax取代。
注:输出层的激活函数目前已经被Softmax取代。
至于这些尺寸关系,我举个两例子吧:
以第一层C1的输入和输出为例。输入尺寸W是28*28,卷积核F尺寸为5*5,步幅S为1,填充P为2,那么输出N的28*28怎么来的呢?按照公式如下:
我们也可以观察到第一层的卷积核个数为6,则输出的通道数也为6。
再看一下第一个池化层S2,输入尺寸是28*28,卷积核F大小为2*2(此处的“卷积核”实际上指的是采样范围),步幅S=2,填充P为0,则输出的14*14是这么算出来的:
其他的没啥好说的,读者们可以自行计算这个尺寸关系。接下来我们给出完整的CNN网络代码,net.py如下:
import torch
from torch import nn# 定义网络模型
class MyLeNet5(nn.Module):# 初始化网络def __init__(self):super(MyLeNet5, self).__init__()self.net = nn.Sequential(nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, padding=2), nn.Tanh(),nn.AvgPool2d(kernel_size=2, stride=2),nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5), nn.Tanh(),nn.AvgPool2d(kernel_size=2, stride=2),nn.Conv2d(in_channels=16, out_channels=120, kernel_size=5), nn.Tanh(),nn.Flatten(),nn.Linear(120, 84), nn.Tanh(),nn.Linear(84, 10))# 前向传播def forward(self, x):y = self.net(x)return y# 以下为测试代码,也可不添加
if __name__ == '__main__': x1 = torch.rand([1, 1, 28, 28])model = MyLeNet5()y1 = model(x1)print(x1)print(y1)这里我还在'__main__'添加了一些测试代码,正如表格中所示,假设我们向网络中输入一个1*1*28*28的向量,模拟批次大小为1,一个单通道28*28的灰度图输入。最终y应该是由10个数字组成的张量,结果如下:
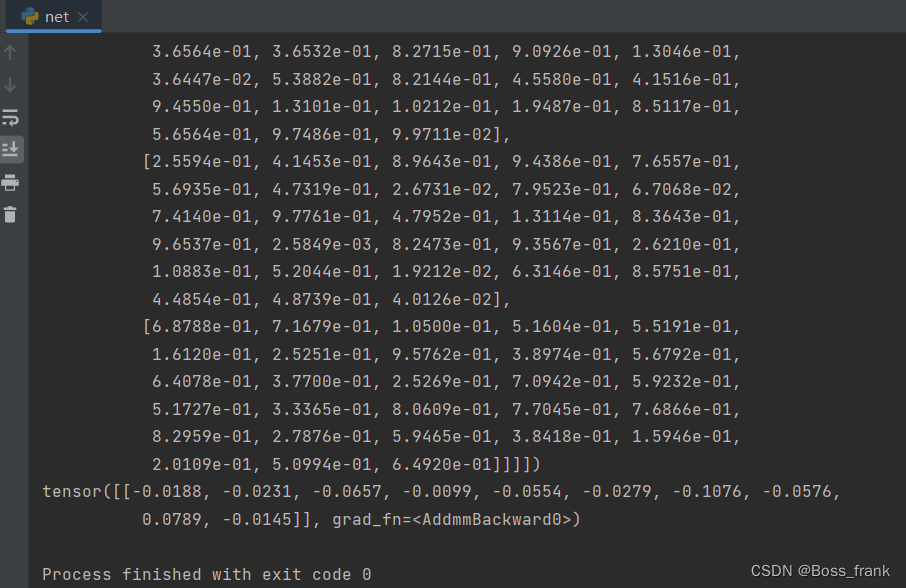
从输出我们可以直观的看到输入经过神经网络前向传播后的结果。另外特别注意这个网络的结构中的参数,其中卷积层的搭建API有5个外参数:
in_channels:输入通道数
out_channels:输出通道数
kernel_size: 卷积核尺寸
padding: 填充,不写则默认0
stride: 步幅,不写则默认1
这个LeNet-5网络结构就长这样,我们一定要严格遵守,否则有可能出现无论怎么训练,都始终欠拟合的情况。我就曾经试过更改/添加不同的激活函数,结果无论是训练还是测试,准确率都在10%徘徊,相当于随机瞎猜的效果,因此大家一定要严格遵循这个网络结构。
3. 模型训练
网络搭建好之后,所有的内参数(即卷积核)都是随机的,下面我们要通过训练尽可能提高网络的预测能力。在训练前,我们首先要选择损失函数(这里使用交叉熵损失函数),定义优化器、进行学习率调整等,代码如下:
import torch
from torch import nn
from net import MyLeNet5
from torch.optim import lr_scheduler# 判断是否有gpu
device = "cuda" if torch.cuda.is_available() else "cpu"# 调用net,将模型数据转移到gpu
model = MyLeNet5().to(device)# 选择损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵损失函数,自带Softmax激活函数# 定义优化器
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3, momentum=0.9)# 学习率每隔10轮次, 变为原来的0.1
lr_scheduler = lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.1)
然后我们可以写一个用于训练网络的函数,四个参数分别是批次加载器、模型、损失函数、优化器,代码如下:
# 定义模型训练的函数
def train(dataloader, model, loss_fn, optimizer):loss, current, n = 0.0, 0.0, 0for batch, (X, y) in enumerate(dataloader):# 前向传播X, y = X.to(device), y.to(device)output = model(X)cur_loss = loss_fn(output, y)# 用_和pred分别接收输出10个元素中的最大值和对应下标位置_, pred = torch.max(output, dim=1)# 计算当前轮次时,训练集的精确度,将所有标签值与预测值(即下标位置)cur_acc = torch.sum(y == pred)/output.shape[0]# 反向传播,对内部参数(卷积核)进行优化optimizer.zero_grad()cur_loss.backward()optimizer.step()# 计算准确率和损失,这里只是为了实时显示训练集的拟合情况。也可以不写loss += cur_loss.item()current += cur_acc.item()n = n + 1print("train_loss: ", str(loss/n))print("train_acc: ", str(current/n))只要调用这个函数,即可实现模型训练:
train(train_dataloader, model, loss_fn, optimizer)当然,我们最好是设定一个轮次epoch,我们后续会写这样一个循环,每训练一个epoch,就进行一次测试,实时显示一定轮次后训练集和测试集的拟合情况。
4. 模型测试
这里和模型训练类似,只不过我们要观察训练好的模型,在测试集的预测效果。与训练的代码相似,只是没有了反向传播优化参数的过程。用于测试的函数代码如下:
def test(dataloader, model, loss_fn):model.eval()loss, current, n = 0.0, 0.0, 0# 该局部关闭梯度计算功能,提高运算效率with torch.no_grad(): for batch, (X, y) in enumerate(dataloader):# 前向传播X, y = X.to(device), y.to(device)output = model(X)cur_loss = loss_fn(output, y)_, pred = torch.max(output, dim=1)# 计算当前轮次时,训练集的精确度cur_acc = torch.sum(y == pred) / output.shape[0]loss += cur_loss.item()current += cur_acc.item()n = n + 1print("test_loss: ", str(loss / n))print("test_acc: ", str(current / n))return current/n # 返回精确度如上代码,将测试集的精确度作为返回值,我们在外围调用这个函数时,可以通过循环找到测试集最大的精确度。
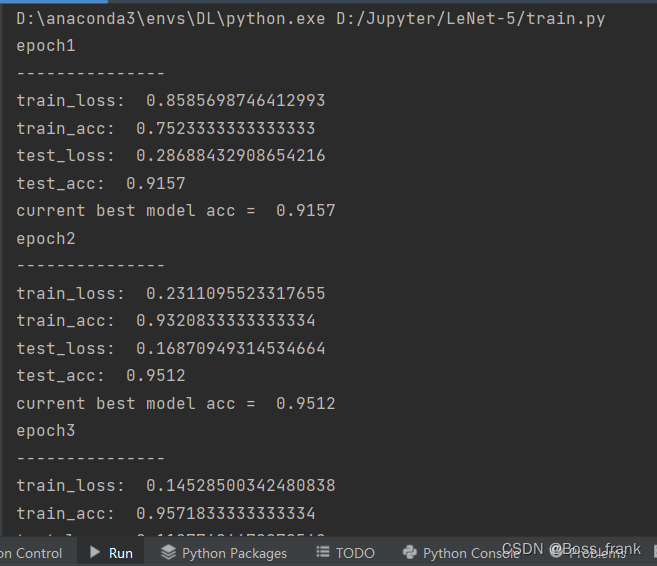
最终我们设定一个训练轮次epochs,此处epochs=50,每经过一个epoch的训练,就进行测试,实时打印观察训练集和测试集的拟合情况。当测试集的精确度是当前的最大值时,我们就保存这个模型的参数到save_model/best_model.pth,代码如下:
import os# 开始训练
epoch = 50
max_acc = 0
for t in range(epoch):print(f"epoch{t+1}\n---------------")# 训练模型train(train_dataloader, model, loss_fn, optimizer)# 测试模型a = test(test_dataloader, model, loss_fn)# 保存最好的模型参数if a > max_acc:folder = 'save_model'if not os.path.exists(folder):os.mkdir(folder)max_acc = aprint("current best model acc = ", a)torch.save(model.state_dict(), 'save_model/best_model.pth')
print("Done!")运行之后可以发现,测试集的精度经过1个epochs就达到了90%以上,最终经过50轮次的训练,测试集精度达到了99%左右:
模型参数也得以保存:
最后给出用于训练和测试的完整代码train.py,如下所示:
import torch
from torch import nn
from net import MyLeNet5
from torch.optim import lr_scheduler
from torchvision import datasets, transforms
import os# 将图像转换为张量形式
data_transform = transforms.Compose([transforms.ToTensor()
])# 加载训练数据集
train_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径train=True, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)# 批次加载器
train_dataloader = torch.utils.data.DataLoader(dataset=train_dataset, batch_size=16, shuffle=True)# 加载测试数据集
test_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径train=False, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)
test_dataloader = torch.utils.data.DataLoader(dataset=test_dataset, batch_size=16, shuffle=True)# 判断是否有gpu
device = "cuda" if torch.cuda.is_available() else "cpu"# 调用net,将模型数据转移到gpu
model = MyLeNet5().to(device)# 选择损失函数
loss_fn = nn.CrossEntropyLoss() # 交叉熵损失函数,自带Softmax激活函数# 定义优化器
optimizer = torch.optim.SGD(model.parameters(), lr=1e-3, momentum=0.9)# 学习率每隔10轮次, 变为原来的0.1
lr_scheduler = lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.1)# 定于训练函数
def train(dataloader, model, loss_fn, optimizer):loss, current, n = 0.0, 0.0, 0for batch, (X, y) in enumerate(dataloader):# 前向传播X, y = X.to(device), y.to(device)output = model(X)cur_loss = loss_fn(output, y)_, pred = torch.max(output, dim=1)# 计算当前轮次时,训练集的精确度cur_acc = torch.sum(y == pred)/output.shape[0]# 反向传播optimizer.zero_grad()cur_loss.backward()optimizer.step()loss += cur_loss.item()current += cur_acc.item()n = n + 1print("train_loss: ", str(loss/n))print("train_acc: ", str(current/n))def test(dataloader, model, loss_fn):model.eval()loss, current, n = 0.0, 0.0, 0# 该局部关闭梯度计算功能,提高运算效率with torch.no_grad():for batch, (X, y) in enumerate(dataloader):# 前向传播X, y = X.to(device), y.to(device)output = model(X)cur_loss = loss_fn(output, y)_, pred = torch.max(output, dim=1)# 计算当前轮次时,训练集的精确度cur_acc = torch.sum(y == pred) / output.shape[0]loss += cur_loss.item()current += cur_acc.item()n = n + 1print("test_loss: ", str(loss / n))print("test_acc: ", str(current / n))return current/n # 返回精确度# 开始训练
epoch = 50
max_acc = 0
for t in range(epoch):print(f"epoch{t+1}\n---------------")train(train_dataloader, model, loss_fn, optimizer)a = test(test_dataloader, model, loss_fn)# 保存最好的模型参数if a > max_acc:folder = 'save_model'if not os.path.exists(folder):os.mkdir(folder)max_acc = aprint("current best model acc = ", a)torch.save(model.state_dict(), 'save_model/best_model.pth')
print("Done!")5. 直观显示预测结果
截至目前,我们已经完成了手写数字识别这个任务,但是我们好像对于数据集长什么样并不是很了解,似乎仅仅是用torchvision中的datasets库下载了一下。因此本小节,我们的目标是从数据集取出几个特定的手写数字图片,并查看我们模型对其的预测效果。
首先我们还是加载数据集,和之前的代码一样,这里省略。然后我们加载模型:
from net import MyLeNet5# 调用net,将模型数据转移到gpu
model = MyLeNet5().to(device)
model.load_state_dict(torch.load('./save_model/best_model.pth'))我们取出测试集中的前5长图片做一个展示即可,完整代码show.py如下:
import torch
from net import MyLeNet5
from torchvision import datasets, transforms
from torchvision.transforms import ToPILImagedata_transform = transforms.Compose([transforms.ToTensor()
])# 加载训练数据集
train_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径train=True, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)# 加载测试数据集
test_dataset = datasets.MNIST(root='D:\\Jupyter\\dataset\\minst', # 下载路径train=False, # 是训练集download=True, # 如果该路径没有该数据集,则进行下载transform=data_transform # 数据集转换参数
)# 判断是否有gpu
device = "cuda" if torch.cuda.is_available() else "cpu"# 调用net,将模型数据转移到gpu
model = MyLeNet5().to(device)
model.load_state_dict(torch.load('./save_model/best_model.pth'))# 获取结果
classes = ["0","1","2","3","4","5","6","7","8","9"
]# 把tensor转化为图片,方便可视化
image = ToPILImage()# 进入验证
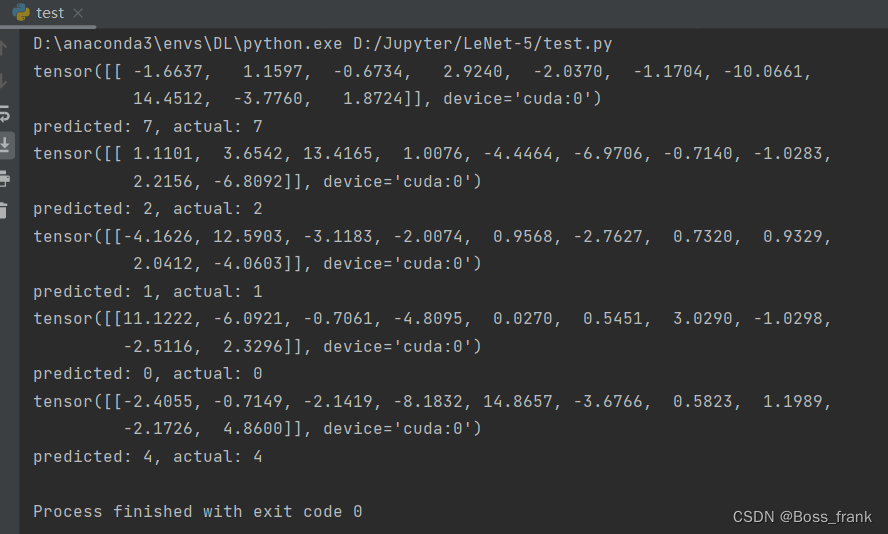
for i in range(5):X, y = test_dataset[i][0], test_dataset[i][1] # X,y对应第i张图片和标签# image是ToPILImage的实例,将Pytorch张量转换为PIL图像,.show()方法会打开图像查看器并显示图像image(X).show()'''unsqueeze 方法在指定的 dim 维度上扩展张量的维度。这里 dim=0,所以它会在第0维添加一个维度.例如,原来的 X 形状是 (1, 28, 28),经过 unsqueeze 处理后,形状变为 (1, 1, 28, 28)。这样做的目的是将单张图像扩展成批次大小为1的形式,这样模型可以接收单张图像作为输入。'''X = torch.unsqueeze(X, dim=0).float().to(device)with torch.no_grad():# 前向传播获得预测结果pred(由10个元素组成的张量)pred = model(X)print(pred)# 将预测值和标签转化为对应的数字分类结果,pred中的最大值视为预测分类predicted, actual = classes[torch.argmax(pred[0])], classes[y]print(f"predicted: {predicted}, actual: {actual}")
运行结果如下,我们可以看到测试集中的前五张图片分别是7,2,1,0,4,且我们的模型都能对其进行成功预测分类。

预测结果均正确,如下:
写在最后
本文介绍了如何使用PyTorch框架搭建卷积神经网络模型CNN。将CNN与DNN进行了类比。CNN中的卷积层与DNN的全连接层是平级关系。我们实现了LeNet-5的模型的搭建、模型训练、测试、网络的复用、直观查看数据集的图片预测结果等,实现了机器学习领域的Hello world——手写数字识别。在CNN原理中,读者应当重点关注输入输出的尺寸关系,并可以对照LeNet-5结构示意图写出对应Pytorch代码。至于模型训练和测试基本都是固定的代码形式。
这篇文章到这里就结束了,后续我还会继续更新深度学习的相关知识,另外近期我个人的研究方向涉及到图神经网络,回头也会更新一些相关博客。如果读者有相关建议或疑问也欢迎评论区与我共同探讨,我一定知无不言。总结不易,还请读者多多点赞关注支持!

这篇关于【深度学习基础】详解Pytorch搭建CNN卷积神经网络LeNet-5实现手写数字识别的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




