本文主要是介绍3、SLAM算法中的运动模型和观测模型和常用传感器类型,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
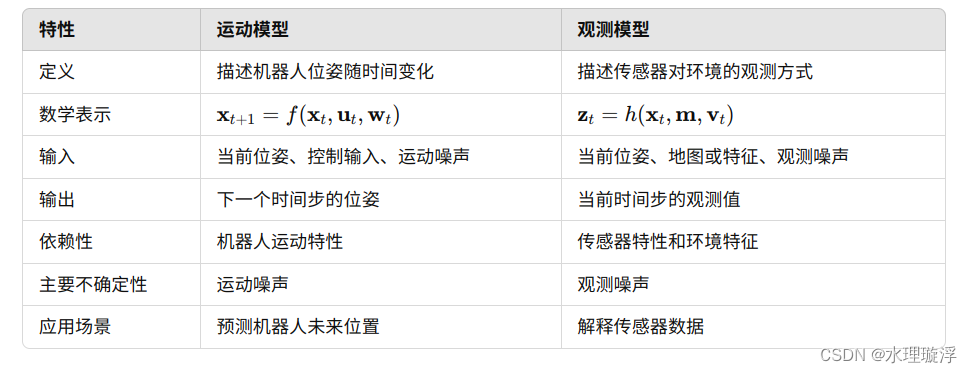
SLAM算法中的运动模型和观测模型
常用传感器类型:局部传感器(相机、IMU、激光雷达等)在小区域内提供了精确的位姿,而全局传感器(GPS、磁力计、气压计等)在大尺度环境中提供了有噪声但是全局无漂移的定位。
1)局部传感器:相机、激光雷达、IMU(加速度计和陀螺仪)等。这类传感器不是全局参考的,因此通常需要一个参考坐标系。通常,机器人的首个位姿被设置为原点,以便启动传感器。机器人的位姿估计从起点开始增量式地累积。因此,累积漂移将随着距离起点距离的增加而增大。
2)全局传感器:GPS、磁力计、气压计等。这类传感器是全局参考的。它总是在一个固定的全局坐标系(例如地球坐标系)下工作。参考系的原点固定,并且事先是已知的。它们的测量数据是全局但是带有噪声的。其误差与行驶距离无关。对于GPS,它测量相对于地球的绝对经度、维度和高度。精度、维度和高度可以转换为x、y和z坐标。对于磁力计,它测量磁场方向和强度,这可以确定方向。对于气压计,它测量气压,这可以转换成高度。
局部位姿估计算法的第一个缺陷为,它们在局部坐标系内产生位姿估计(相对于起始点),而不是全局坐标。当我们即使从同一环境中的不同位置开始,我们也可能获得不同的估计结果。因此,如果没有固定的全局坐标,它们对复用是不友好的。第二个缺陷为,由于缺少全局测量数据,在长期运行过程中,局部估计容易累积漂移。尽管已经提出了一些基于视觉的回环方法来消除漂移,但是它们仍然无法处理带有大量数据的大尺度环境。
与局部传感器相比,GPS、气压计、磁力计等全局传感器在大尺度环境中的全局定位方面具有优势。它们提供了相对于固定地球坐标系的全局测量,这是没有漂移的。然而,这些测量信息通常是非平滑且带有噪声的,因此无法直接用于精确控制和导航。以GPS为例,它能够测量以米为单位的近似位置,但是该测量在低频率下是不连续的。此外,它只能测量三维位置,而无法测量三维旋转。因此,仅有全局传感器是不足以实时地进行6自由度状态估计的。
由于局部传感器(相机、IMU和激光雷达)在局部精确性方面实现了令人印象深刻的性能且全局传感器(GPS、磁力计和气压计)是无漂移的,因此聪明的方式是将它们融合到一起以实现局部精确且全局无漂移的6自由度位姿估计。为了提高鲁棒性,我们想要融合尽可能多的传感器。因此,需要一种支持多传感器的通用框架。尽管传统的基于EKF方法能够逐渐地将局部估计融合到全局坐标系中,但是需要有关不同坐标系之间变换的精确初始值,以保证结果收敛。此外,EKF方法还对时间同步敏感。任何延迟传入的测量数据将导致麻烦,因为无法在滤波过程中反向传递状态。
这篇关于3、SLAM算法中的运动模型和观测模型和常用传感器类型的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








