观测专题

图解可观测Metrics, tracing, and logging
最近在看Gophercon大会PPT的时候无意中看到了关于Metrics,Tracing和Logging相关的一篇文章,凑巧这些我基本都接触过,也是去年后半年到现在一直在做和研究的东西。从去年的关于Metrics的goappmonitor,到今年在排查问题时脑洞的基于log全链路(Tracing)追踪系统的设计,正好是对这三个话题的实践。这不禁让我对它们的关系进行思考:Metrics和Loggi
OpenObserve云原生可观测平台本地Docker部署与远程访问实战教程
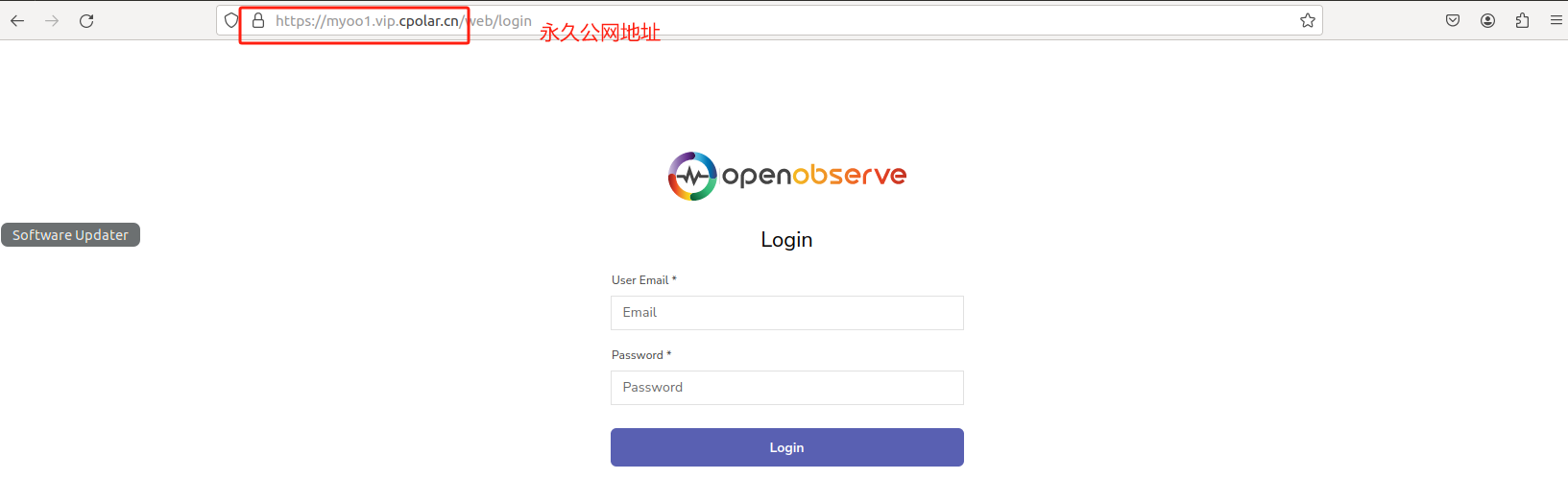
文章目录 前言1. 安装Docker2. Docker镜像源添加方法3. 创建并启动OpenObserve容器4. 本地访问测试5. 公网访问本地部署的OpenObserve5.1 内网穿透工具安装5.2 创建公网地址 6. 配置固定公网地址 前言 本文主要介绍如何在Linux系统使用Docker快速本地化部署OpenObserve云原生可观测平台,并结合cpolar内网穿透工

「邀您参会」9月20日 中国可观测日成都站
随着首届中国可观测日上海站的圆满落幕,中国站第二站将于 9 月 20 日在成都盛大开启。在此,我们诚挚邀请您参与这场专注于监控观测领域的技术交流盛会,与行业精英共同探讨可观测性技术的前沿趋势和实践应用。 活动亮点 1、技术交流盛宴:继上海站之后,成都站将继续深入探讨 OpenTelemetry、Anomaly Detection 等前沿技术,并通过实际案例分享,为您提供一个全面了解可观测性技术
华为云全栈可观测平台(APM)8月新功能特性
华为云应用性能管理服务(Application Performance Management,简称APM)帮助运维人员快速发现应用的性能瓶颈,以及故障根源的快速定位,为用户体验保驾护航。 您无需修改代码,只需为应用安装一个APM Agent,就能够对该应用进行全方位监控,帮助您快速定位出错接口和慢接口、重现调用参数、发现系统瓶颈,从而大幅提升线上问题诊断的效率。 8月APM更新了3大新特性,一
观测云核心技术解密:eBPF Tracing 实现原理
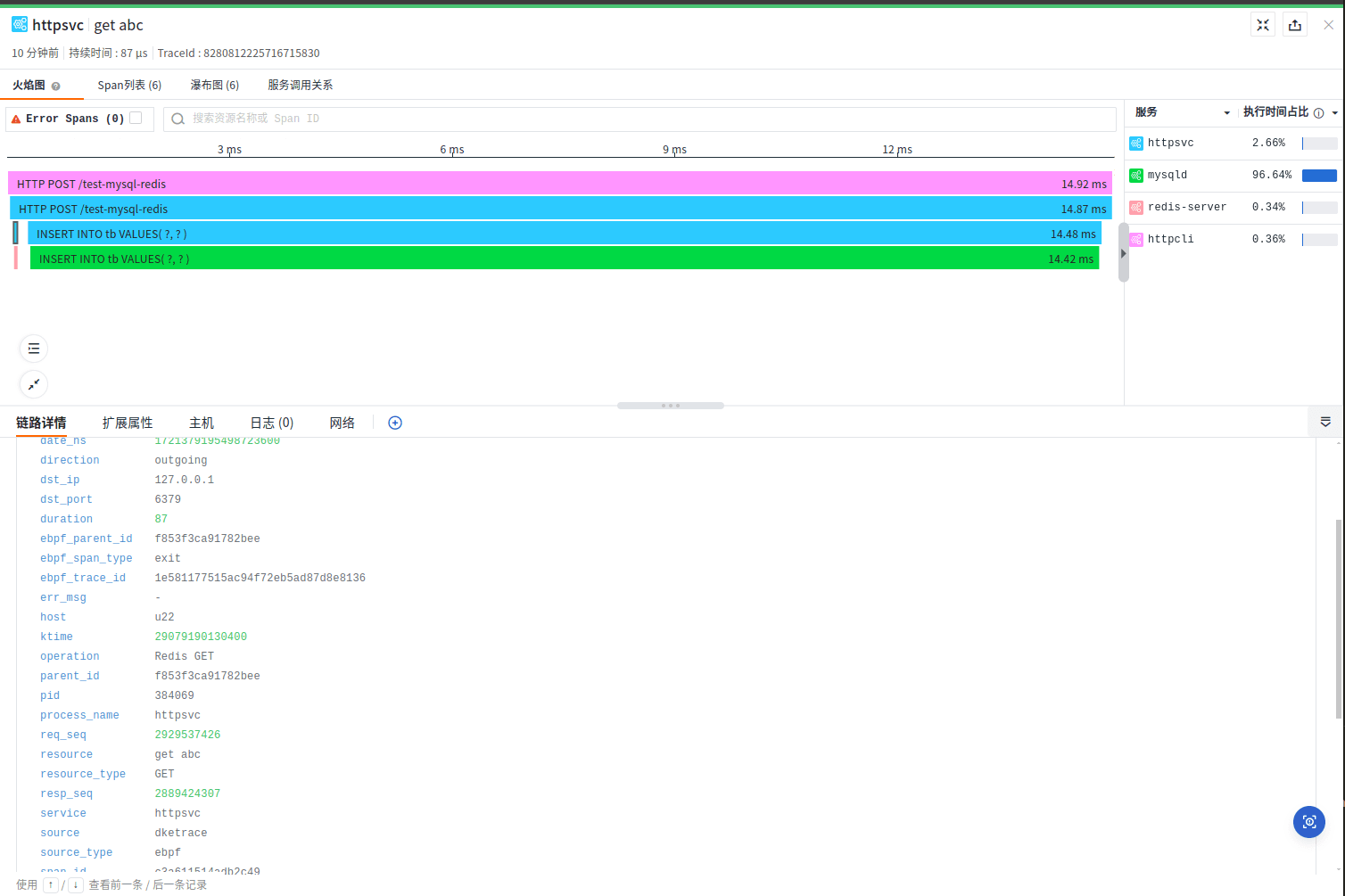
前言 eBPF 是一种强大的内核技术,允许在内核中安全地执行自定义代码。通过 eBPF,开发者可以在不修改内核源码的情况下,对内核功能进行扩展和监控。eBPF Tracing 利用这一技术,对系统调用、内核函数等进行跟踪,从而实现对应用行为的深入洞察。 与传统的监控方式相比,eBPF Tracing 具有以下优势: 无侵入性:无需修改应用代码即可进行监控。高性能:在内核层面执行,减少了对应用


基于carsim的线控转向仿真(2)--齿条力观测
观测器更详细的介绍文章可以关注博主以下两篇文章 从小车倒立摆系统看系统建模控制LQR+LQE仿真_lqr平衡小车仿真模型-CSDN博客 好玩的直流电机调速实验、PID、极点配置、LQR、观测器;不讲大道理_观测器极点配置-CSDN博客 三个实例迅速掌握经典卡尔曼滤波用法_卡尔曼滤波 温度估计-CSDN博客 本篇文章中,博主使用matlab提供的kalman函数,进行观测器设计。 一、系统

基于神经塑性的地球观测多模态基础模型 (慕尼黑工业大学, TUM)
Neural Plasticity-Inspired Multimodal Foundation Model for Earth Observation 2403.15356 (arxiv.org) ------| 本博客非完整版,完整版请参阅原文 |------ Abstract 基础模型的发展彻底改变了利用卫星观测数据解释地球表面的能力。传统模型相互孤立,专为特定传感器或数据

Linux 性能观测之CPU平均负载
写在前面 博文内容涉及 Linux 平均负载认知以及对造成平均负载波动的场景认知: CPU 密集型进程I/O 密集型进程大量进程 理解不足小伙伴帮忙指正 😃,生活加油 99%的焦虑都来自于虚度时间和没有好好做事,所以唯一的解决办法就是行动起来,认真做完事情,战胜焦虑,战胜那些心里空荡荡的时刻,而不是选择逃避。不要站在原地想象困难,行动永远是改变现状的最佳方式 Linux 平均负载

R语言统计分析——回归中的异常观测值
参考资料:R语言实战【第2版】 一个全面的回归分析要覆盖对异常值的分析,包括离群点、高杠杆点和强影响点。这些数据点需要更深入的研究,因为它们在一定程度上与其他观点不同,可能对结果产生较大的负面影响。 1、离群点 离群点是指那些模型预测效果不佳的观测点。它们通常有很大的、或正或负的残差(残差:实际值-预测值)。正的残差说明低估了响应值,负的残差则说明高估了响应值

一类带观测传感器延时修正(时间同步)的融合算法举例浅析(节选至售后群问答回复)
一类带观测传感器延时修正(时间同步)的融合算法举例浅析(节选至售后群问答回复) 2018年6月13日 无名小哥 交流群:540707961 可以设想一个场景,比如你工资是一个日结制,每天下午5点半下班,这个钱每天晚上6点钟会打到你这个银行卡上,但实际到账的话,是会到第二天晚上6点,你的工资卡归你老婆管,家庭日常开支、理财、利息等都来自此卡。 你每天下午7点都会对你的卡上总财富进行估计,因

建筑主体沉降观测规范详解
随着城市化进程的加速,高层建筑和大型建筑项目日益增多,建筑主体的沉降观测工作显得尤为重要。沉降观测是确保建筑安全稳定的关键环节,对于预防建筑安全事故、保障人民生命财产安全具有重要意义。本文将详细解析建筑主体沉降观测的规范和要求。 一、沉降观测的基本频率 根据建筑的高度和施工阶段,沉降观测的频率有所不同。一般来说,高层建筑主体施工期内,每层应至少进行一次沉降观测;主体封顶后一

APM Profile 在系统可观测体系中的应用
引言 应用程序性能分析(Application Performance Management,APM)是一个广泛的概念,涉及应用程序运行时各种性能指标的监测、诊断和优化。在可观测体系建设中,APM 是保障系统业务运行性能的关键技术,确保用户可以借助可观测技术手段,感知并发现以往监控工具难以发现的应用运行过程中隐藏的问题。 应用性能分析的主要场景 当我们应用观测云系统进行分析和监控时,采集到的

构建多模态模型,生成主机观测指标,欢迎来战丨2024天池云原生编程挑战赛
在当前云计算和微服务架构日益普及的背景下,企业和开发者对云资源的依赖日益加深。Elastic Compute Service(ECS)作为提供计算能力的核心服务,承担着众多的业务。随着微服务架构的广泛应用,任务的部署和执行变得更为灵活和动态,资源的动态伸缩成为常态,能够根据业务需求实时调整,提升资源利用效率和应用的可用性。 在这种动态变化的环境中,如何有效地监控和预测 ECS 主机的性能变化

开始报名啦!智能可观测运维技术 MeetUp 议题硬核来袭
「龙蜥社区“走进系列”MeetUp」是由龙蜥社区与生态合作伙伴联合主办的系列月度活动,每期走进一家企业,聚焦龙蜥社区和合作伙伴的技术、产品和创新动态,展示硬核技术,共建繁荣生态。 龙蜥社区“走进系列”第 11 期走进中兴通讯-智能可观测运维技术 MeetUp 将于 2024 年 6 月 28 日(周五)在成都举行,由中兴通讯联合龙蜥社区系统运维联盟(SOMA)共同举办。本次活动邀请了阿里云、谐云

前端可观测性系统建设
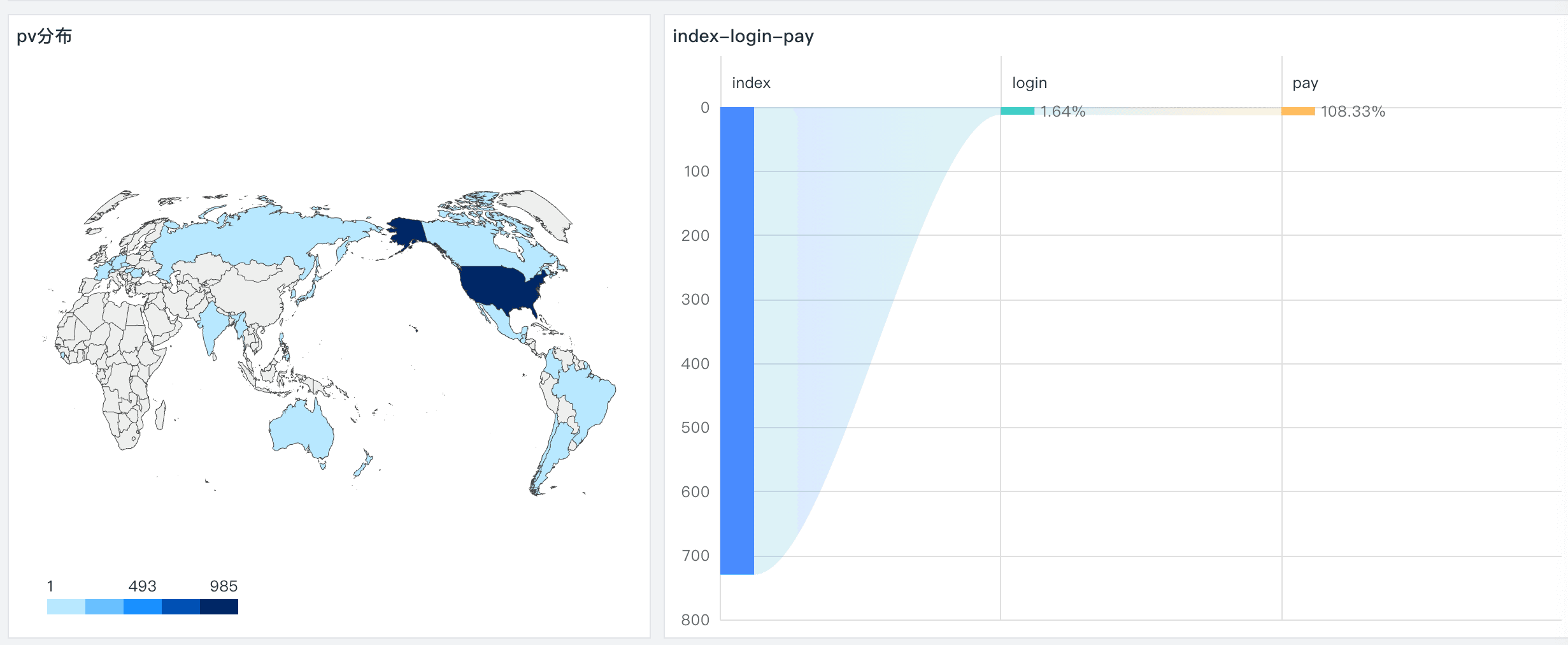
一. 背景 随着前端业务的日趋庞大,及时发现和解决业务中的问题、优化用户体验、实时监控业务健康度变得愈发重要。在业务层面,我们希望能够监控每次发布版本后,核心功能是否有显著提升或至少没有负面影响,核心接口是否正常运作,页面跳失率是否有明显增加。而在技术层面,我们希望能够日常监控首屏加载时间,确保页面没有因为发布版本、运营配置、活动结束、库存不足等因素而出现错误。最后,我们还希望能够帮助业务

【通信协议-RTCM】GPS-RTK可观测消息 ---- 对应RTCM十六进制 编码ID(3E9 3EA 3EB 3EC)
1. 消息头的内容,类型1001、1002、1003、1004:GPS RTK消息 DATA FIELDDF NUMBERDATA TYPENO. OF BITS Message Number(e.g.,“1001”= 0011 1110 1001) - 消息编号 DF002 uint12 12 Reference Station ID - 参考值ID DF003 uint12 1

DeepSORT(目标跟踪算法) 卡尔曼滤波 状态向量是如何映射到观测向量(测量向量)的即观测矩阵的构建方式
DeepSORT(目标跟踪算法) 卡尔曼滤波 状态向量是如何映射到观测向量(测量向量)的即观测矩阵的构建方式 flyfish 测量向量和观测变量在卡尔曼滤波的上下文中通常是同一个意思。它们都指的是从系统中直接获得的数据,这些数据用于更新系统的状态估计。可以是从传感器或测量设备直接获得的数据。这些数据反映了系统在某一时刻的状态或者实际观测到的值,但通常带有噪声。 状态向量映射到观测向量的过程通过
3、SLAM算法中的运动模型和观测模型和常用传感器类型
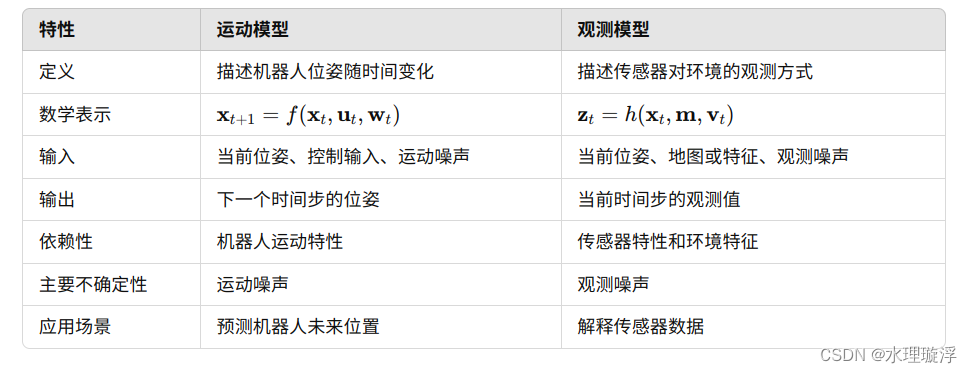
SLAM算法中的运动模型和观测模型 常用传感器类型:局部传感器(相机、IMU、激光雷达等)在小区域内提供了精确的位姿,而全局传感器(GPS、磁力计、气压计等)在大尺度环境中提供了有噪声但是全局无漂移的定位。 1)局部传感器:相机、激光雷达、IMU(加速度计和陀螺仪)等。这类传感器不是全局参考的,因此通常需要一个参考坐标系。通常,机器人的首个位姿被设置为原点,以

微服务架构-可见可观测与量化分析体系
目录 一、可见可观测 1.1 概述 1.2 服务可见性 1.2.1 概述 1.2.2 服务描述 1.2.3 服务所有权 1.2.4 服务对外接口 1.2.5 服务SLA 1.2.6 服务的上下游拓扑 1.2.7 服务变更 1.2.8 服务接入和资源配额管理 1.2.9 服务线上部署和线下测试环境信息 1.3 变更可见性 1.4 可观测性 1.4.1 概述 1
贴合客户发展阶段 定义观测服务路径 -- DeepFlow金融银行业可观测性方案发布
金融信创是金融机构重点投入以及技术迭代的方向,经过多年阶段迭代,进入难度更大的核心系统、关键业务系统的更替阶段。近日,云杉网络凭借其在云原生可观测性领域的深厚积累,正式发布了DeepFlow金融银行业可观测性方案及服务,解决行业中普遍存在的分布式交易系统保障难、平台双轨多芯调优难、云上资源把控难、分布式数据库追踪难等挑战。方案基于DeepFlow可观测性平台以及总结金融客户发展特点,注重产品与服务
Shopify 独立站监控观测最佳实践
Shopify 简介 Shopify 是一个全球领先的电子商务平台,它为商家提供了一整套在线商店解决方案。自 2006 年成立以来,Shopify 已经帮助数百万商家在全球范围内建立和发展他们的在线业务。 监控观测 Shopify 站点对于确保业务连续性、优化用户体验和提高运营效率具有重要意义。 监控站点的性能可以帮助商家了解页面加载时间、响应速度等关键指标。性能问题可能会影响用户体验和转化

linux可观测性ebpf(一) ----------- 环境搭建
参考书籍 开发环境 Ubuntu 18.04.6 LTS (GNU/Linux 5.4.0-150-generic x86_64) 1.1 下载内核源码 cd /usr/src/sudo git clone -b v5.4 https://github.com/torvalds/linux.git 1.2 下载书中代码 git clone https://github.com/

活动回顾 | 「观测云」为何成为中国峰会可观测性领域的唯一代表?
在刚刚闭幕的亚马逊云科技中国峰会上,「观测云」以其在中国可观测性领域的卓越表现,荣获峰会可观测性领域的独家代表。尽管作为峰会长期全球赞助商的 DataDog 和 Dynatrace 未能亲临中国站现场,但他们的持续支持和贡献为大会增添了独特的光彩。 放眼全球,DataDog 与 Dynatrace 都是监控观测领域的重要参与者,它们提供了先进的技术和解决方案,帮助企业优化其 IT 运营和
【找出缺失的观测数据】python
思路: 主要在于分配剩余的部分分配问题 代码: class Solution:def missingRolls(self, rolls: List[int], mean: int, n: int) -> List[int]:m = len(rolls)total_sum = (n + m) * meantoset = total_sum - sum(rolls)# 检查 toset

力扣2028. 找出缺失的观测数据
题目: 现有一份 n + m 次投掷单个 六面 骰子的观测数据,骰子的每个面从 1 到 6 编号。观测数据中缺失了 n 份,你手上只拿到剩余 m 次投掷的数据。幸好你有之前计算过的这 n + m 次投掷数据的 平均值 。 给你一个长度为 m 的整数数组 rolls ,其中 rolls[i] 是第 i 次观测的值。同时给你两个整数 mean 和 n 。 返回一个长度为 n 的数组,包含所有缺失