本文主要是介绍数仓建模—指标拆解和选取,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
数仓建模—指标拆解和选取
第一节指标体系初识介绍了什么是指标体系
第二节指标体系分类分级和评价管理介绍了指标体系管理相关的,也就是指标体系的分级分类
这一节我们看一下指标体系的拆解和指标选取,这里我们先说指标选取,其实在整个企业的数字化建设过程中我们其实最大的问题不是没有指标,而是指标太多,而这么多的指标却不能真实的反应业务的现状,这主要是有两个原因
- 指标没有被很好的组织管理起来,也就是没有体系,举个例子,别墅和平房用的都是相通的砖和水泥,但是别墅就是卖的贵
- 指标本身不能很好的反映业务,也就是指标的设计有问题
明确业务目的 确定核心指标
指标的选取是很核心的一步。如果我们选择了正确的指标,它就像一个晴雨表,能很好地衡量业务的健康状况。如果我们选择了一个错误的或者是虚荣的指标,它可能会把我们引导到一个错误的路径上去,这是一个很大的陷阱。
业务目标其实是和我们的产品息息相关的,我们可以大致将我们的产品划分到下面四类中去
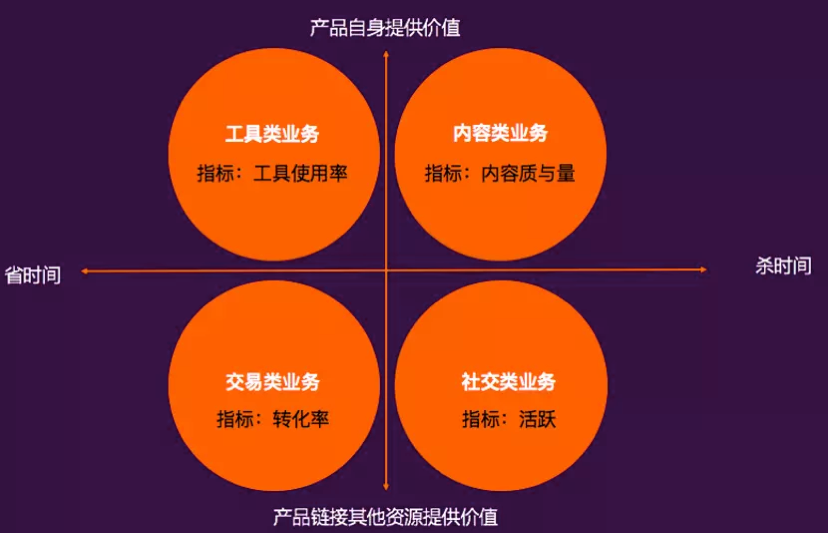
针对每一类的产品,我们都可以抽象出下面的一些比较通用的指标
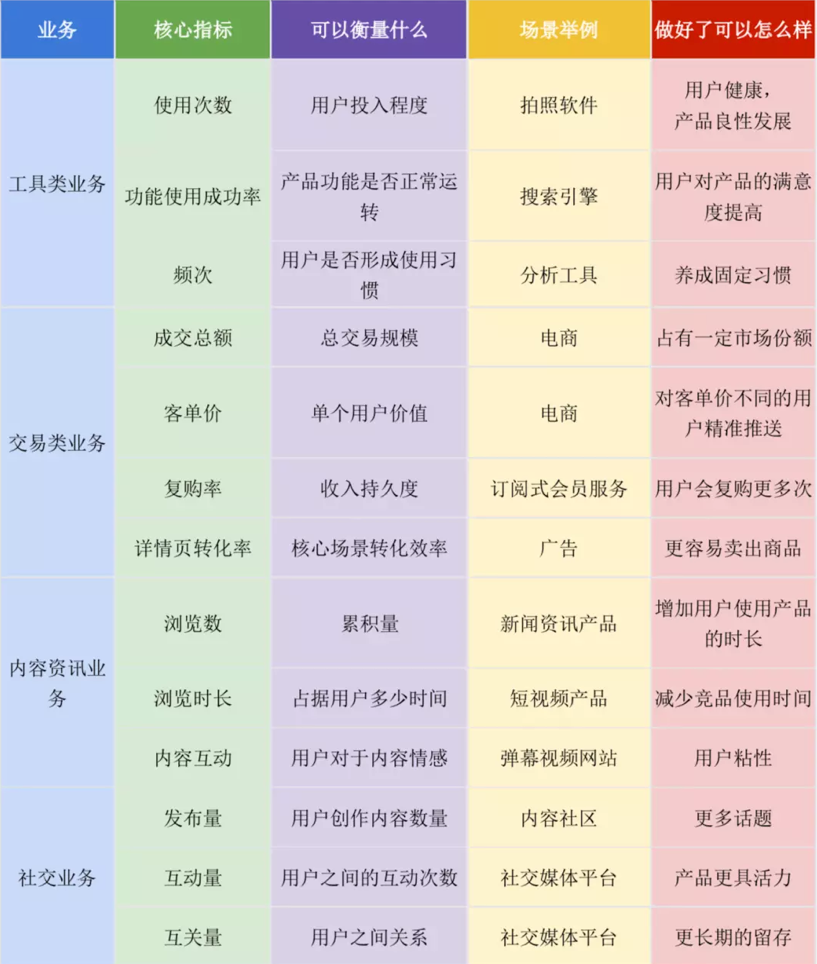
工具类业务
帮助用户节省时间,产
这篇关于数仓建模—指标拆解和选取的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








