本文主要是介绍【康耐视国产案例】智能AI相机机器视觉精准快速实现包裹标签的智能粘贴,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
康耐视推出的3D-A1000是专业的、匹配物流行业各类分拣机及包裹检测应用的全功能视觉检测系统,其能够准确检测分拣机上是否有包裹、包裹是否超出边界、空车检测、是否有遗留物品等。由于搭载了专利的三维结构光技术,产品具有更强大的创新性以满足持续更新的客户需求。
本期,将聚焦3D-A1000在快递物流行业中针对包裹的智能贴标及标签验证应用,深入剖析其方案的独特特性与显著价值。
客户需求
不同于常规情况下,只需验证包裹上一个标签的粘贴是否正确,本次案例的客户,希望在包裹表面已有标签的基础上,贴上新标签来显示包裹的实际重量。然而,实现这一需求却面临四大挑战:
1、新标签不能遮挡住包裹上原先的标准运输标签条形码
2、贴标过程应尽量快速、精准,确保整体作业效率不受影响
3、方案应不对包裹的尺寸和形态进行限制,做到应贴尽贴、应检尽检
4、方案尽量小型化和轻量化,不因现场作业空间有限而难以落地
康耐视3D-A1000解决方案
针对以上需求,康耐视为客户量身定制了一套基于3D-A1000的快递物流行业包裹智能贴标及标签验证视觉解决方案——将两台3D-A1000分别安装在两台机械手臂上,其中一台负责抓取包裹,另一台负责找到位置智能贴标,两台设备组网协同完成整体作业。

1
定位原有标签
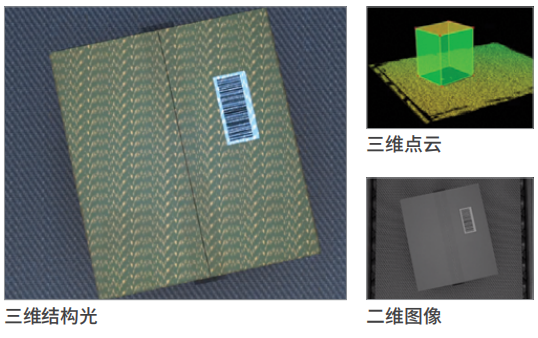
首先,利用3D-A1000的2D图案定位工具,定位原有标签位置,并引导机械臂完成包裹的抓取。由于3D-A1000配备了经过验证的康耐视嵌入式视觉工具,能够轻松应对各种包裹包括检测小件、透明件和反光材质等,以及应对多种尺寸和形态的包裹完成稳定检测。

2
重新定位新标签位置
其次,通过3D-A1000的3D表面定位工具,找寻到包裹上所有可行的三维位置坐标,并通过简单编程规划,引导机械臂在避免覆盖原有标签前提下,选择最短移动路径进行新标签的粘贴,从而提升贴标工作效率。
此项目充分展现了3D-A1000在2D与3D技术结合方面的卓越能力,仅通过少量的脚本编写,就能为客户提供高效且精准的包裹智能贴标及标签验证解决方案。这款具有紧凑外形的3D-A1000智能相机,通过其独特的机械手臂部署方式,在有限的空间内就能轻松完成部署。在出厂前,3D-A1000已完成调焦和标定,系统集成如同安装般简单,用户只需通过直观的设置向导,在15分钟内即可完成安装,展现出了其高效与便捷性。
目前,康耐视所提供的3D-A1000包裹智能贴标及标签验证视觉方案已在客户端成功落地实施,不仅提升了工作效率,还保证了贴标的精准度,为客户带来了显著的价值。

与市面上其他方案相比,传统一维方案提供的反馈有限,处理不同类型的分拣机、不同尺寸的包裹时缺乏灵活性;传统二维方案对整洁程度问题敏感,需要现场进行费时的对焦和打光调整;传统三维方案通常需要定制编程;传统人工操作方案更加费时且不可靠。
而3D-A1000方案则在这些方面进行了全面的优化和提升。它融合了三维和二维技术的优势,不仅作业准确度高,而且作业效率也非常出色。与此同时,该方案并不会对产线的整体作业速度产生任何影响,确保了生产线的流畅运行。
此外,3D-A1000方案对安装环境的要求相对较低,降低了部署的难度和成本。更为值得一提的是,其编程简单,开箱即用,极大地缩短了部署和调试的时间,为企业带来了显著的经济效益。
这篇关于【康耐视国产案例】智能AI相机机器视觉精准快速实现包裹标签的智能粘贴的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






