康耐视专题

康耐视深度学习VIDI介绍-工具与概念(2)
2.1 Cognex ViDi 概念 Cognex ViDi Suite 深度学习软件用于训练基于标记图像集的视觉优化深度神经网络 (VODNN)。经过训练的网络可以执行以下操作: 找到并识别图像中的特征。找到并读取图像中的字符和字符串。识别、定位和表征图像中的缺陷。对图像分类。 Cognex ViDi Suite 工具操作分为两个阶段: 训练阶段:工具分析标记的训练图像集,训练网络。

【康耐视国产案例】智能AI相机机器视觉精准快速实现包裹标签的智能粘贴
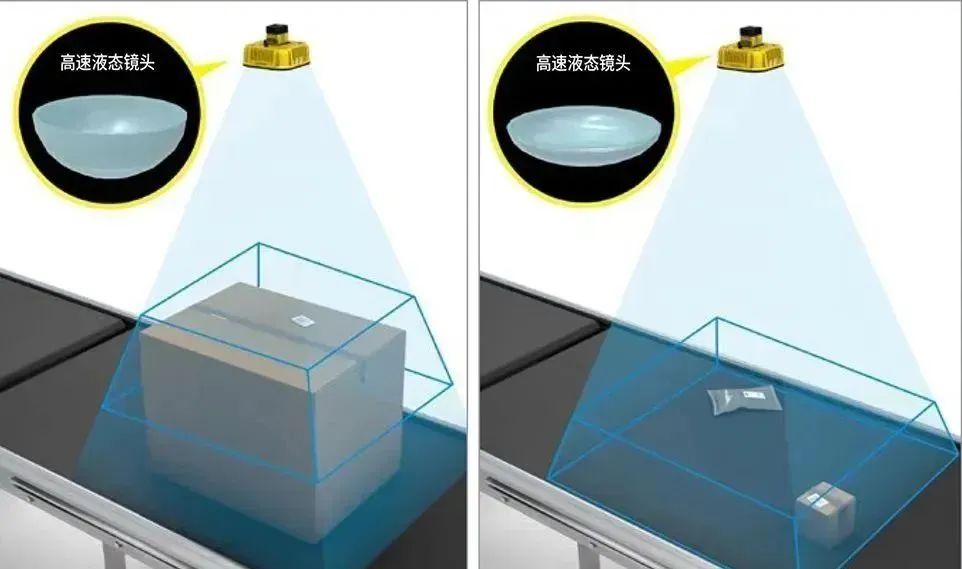
康耐视推出的3D-A1000是专业的、匹配物流行业各类分拣机及包裹检测应用的全功能视觉检测系统,其能够准确检测分拣机上是否有包裹、包裹是否超出边界、空车检测、是否有遗留物品等。由于搭载了专利的三维结构光技术,产品具有更强大的创新性以满足持续更新的客户需求。 本期,将聚焦3D-A1000在快递物流行业中针对包裹的智能贴标及标签验证应用,深入剖析其方案的独特特性与显著价值。 客户需求

【康耐视国产案例】AI视觉相机创新 加速商超物流数智化转型
连锁商超/零售店正面临着因消费者购物习惯改变等挑战,迎来了以新兴技术崛起而催生的数字化物流体系转型需求。物流行业与AI机器视觉的深度融合,解决了传统机器视觉识别速度慢、环境要求高、定制化部署耗时过多等痛点,大大提高了物流供应链的效率和准确性。 本期将聚焦商超零售供应链内部的物流周转环节优化,为同类场景应用带来更多启发。 康耐视推出的搭载边缘学习技术的机器视觉产品In-Sight 280
【康耐视国产案例】智能AI相机:深度解析DataMan 380大视野高速AI读码硬实力
随着读码器技术的不断更新迭代,大视野高速应用成为当前工业读码领域的关键发展方向。客户对大视野高速读码器的需求源于其能显著减少生产成本并提升工作效率。然而,大视野应用场景往往伴随着对多个条码的读取需求,这无疑增加了算法的处理负担,进而可能影响到读取速度。 针对这一挑战,康耐视推出了性能卓越的DataMan 380系列固定式读码器,重新定义了大视野高速读码的标准。该系列读码器不仅拥有宽广

康耐视visionpro-CogOCRMaxTool操作操作工具详细说明
CogOCRMaxTool功能说明: 字符识别工具 CogOCRMaxTool操作说明: 1.打开工具栏,双击或点击鼠标拖拽添加CogOCRMaxTool工具 ②.添加输入图像,右键“链接到”或以连线拖拽的方式选择相应输入图像。 ③.将屏幕上的检测区域拖拉到需要检测的字符区域,每次只能检测一行字符,检测区域大小尽量与字符大小相近,可减少干扰。 ④.选择“Font Training”设置栏;
康耐视visionpro-CogCreateLinePerpendicularTool操作操作工具详细说明
CogCreateLinePerpendicularTool]功能说明: 创建点到线的垂线 CogCreateLinePerpendicularTool操作说明: ①.打开工具栏,双击或点击扇标拖拽添加CogCreateLinePerpendicularTool ②.添加输入源:右键“链接到”或以连线拖 拽的方式选择相应输入源。 X:输入X点 Y:输入Y点 Line:输入线 ③.运行工具后,输
康耐视visionpro-CogDistancePointLineTool操作工具详细说明
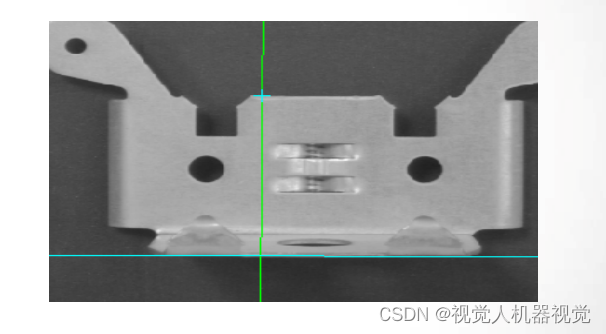
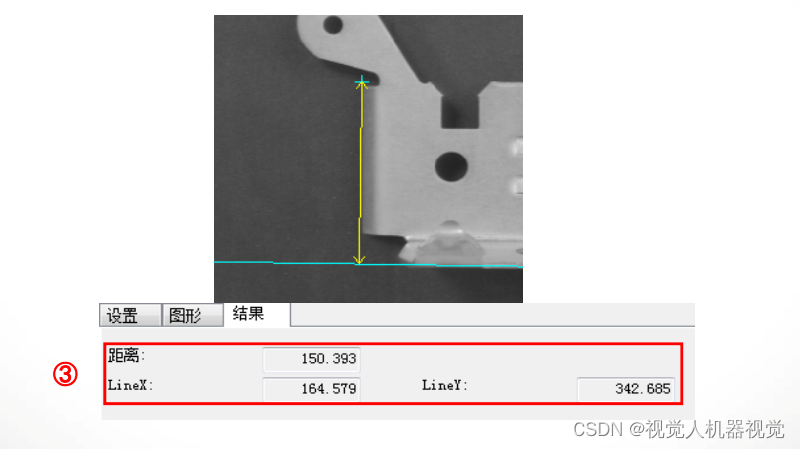
◆CogDistancePointLineTool:功能说明: 测量点到线的距离 备注:在“Geometry-Measurement”选项中的所有工具都是测量尺寸或角度工具,包括测量线与线的角度、点与线的距离、圆与圆的距离等测量工具,工具使用的方法相似。 ①.打开工具栏,双击或点击鼠标拖拽添加CogDistancePointLineTool.工具 ②.添加输入图像,点击鼠标右键“链接到”或以连
康耐视visionpro-CogFindLineTool操作工具详细说明
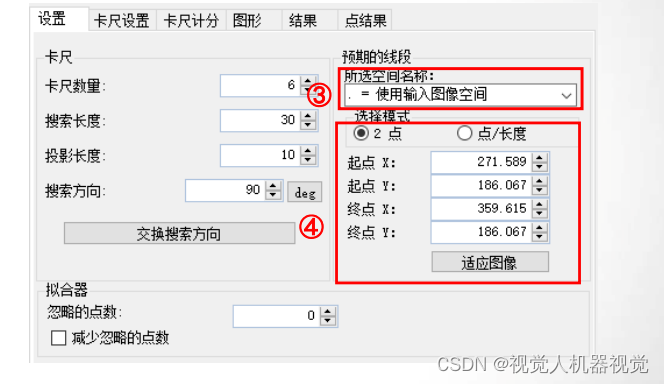
◆CogFindeLineTool功能说明: 检测图像的直线边缘,实现边缘的定位、测量。 ◆CogFindeLineTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogFindLineTool工具 ②.添加输入图像,点击鼠标右键“链接到”选择输入图像或以连线拖拽的方式选择相应输入图像 ③.所选空间名称:选择不同的空间名称,预期线段的位置会自动转换到新的坐标系位置。默认“使用输入图像
康耐视visionpro-CogFindCircleTool操作工具详细说明
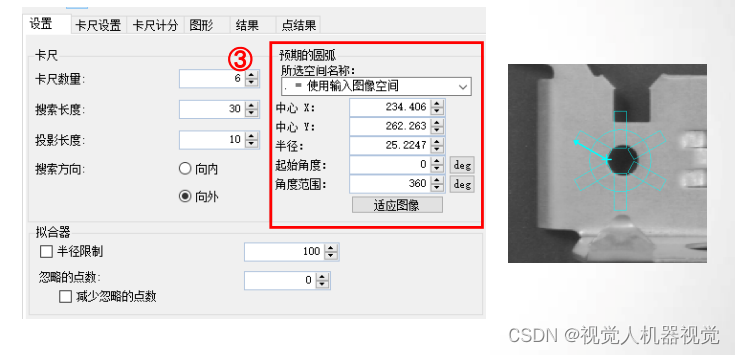
◆CogFindCircleTool]功能说明: 通过用多个卡尺找到多个点来拟合所要找的圆 ◆CogFindCircleTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogFindCircleTool工具 ②.添加输入图像,右键“链接到”或以连线拖拽的方式选择相应输入源 ③预期的圆弧:设置预期圆弧的中心点、半径、起始角度及角度范围。也可以在屏幕上手动移动或拖拉图形实现预期圆弧中心
康耐视visionpro-CogBlobTool工具操作详细说明
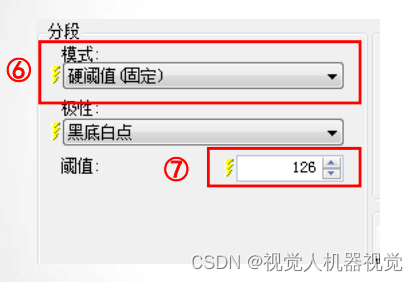
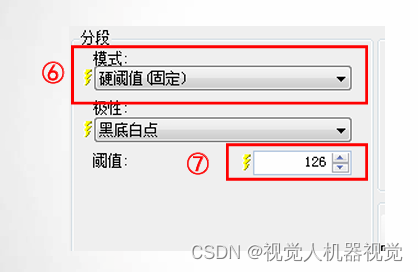
CogBlobTool功能说明: 通过设置灰度值提取感兴趣区域,并分析所提取区域的面积、长宽等参数。 Cog BlobTool操作说明: .打开工具栏,双击或点击鼠标拖拽添加CogBlobTool工具 ②.添加输入图像:单击鼠标右键“链接到”或以连线拖拽的方式选择相应输入源 ③.极性: “白底黑点”提取的区域为白色背景中的黑色区域; “黑底白点”提取的区域为黑色背景中的白色区域; ④.最小面积
康耐视visionpro-CogDataAnalyTool操工具详细说明
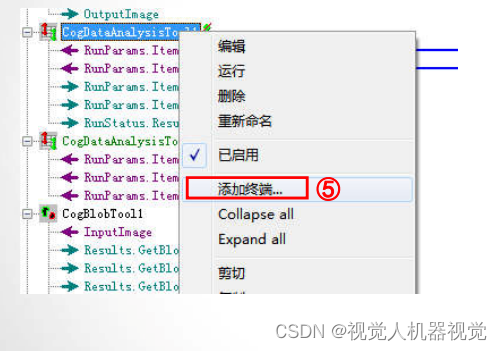
CogDataAnalyTool功能: 数据分析工具,统计数据的平均值、标准差、最大值及最小值等。 CogDataAnalyTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogDataAnalyTool ②.添加通道:根据需要添加多个输入通道,可同时统计多个输入数据。 ③.打开结果栏,点击运行可获取数据结果 ④. 数据结果:可得到均值、标准差、最小值和最大值。(若图像未标定,所有结
康耐视visionpro-CogIntersectLineLineTool工具详细说明
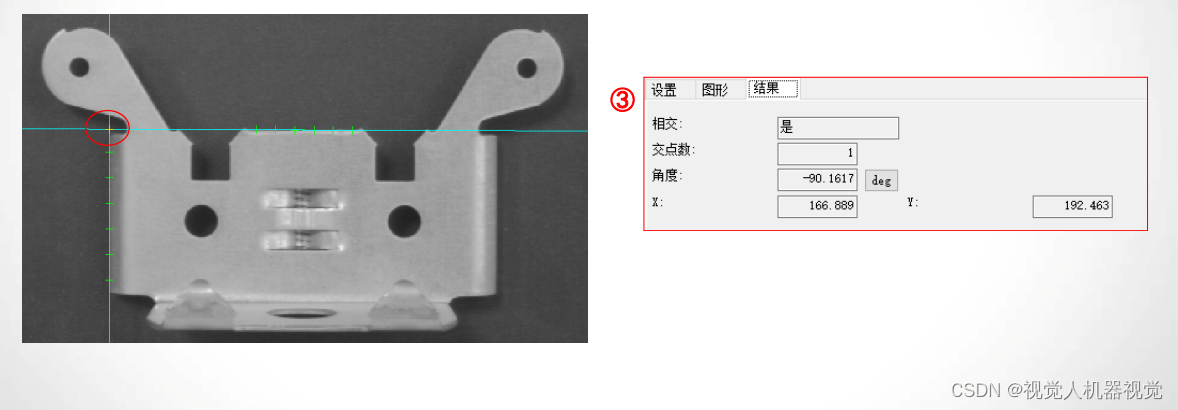
CogIntersectLineLineTool功能说明: 创建两条线的交点 备注:在“Geometry-Intersection”选项中的所有工具都是创建两个图形的交点工具,其中包括圆与圆的交点、 线与圆的交点、线与线的交点、线与圆的交点等,工具使用的方法相似。 ①.打开工具栏,双击或点击鼠标拖拽添加CogIntersectLineLineTool工具 ②.添加输入图像,点击鼠标右键“链接到
康耐视visionpro-CogBlobTool工具详细说明
CogBlobTool功能说明: 通过设置灰度值提取感兴趣区域,并分析所提取区域的面积、长宽等参数。 CogBlobTool操作说明: ①.打开工具栏,双击或点击鼠标拖拽添加CogBlobTool工具 ②.添加输入图像:单击鼠标右键“链接到”或以连线拖拽的方式选择相应输入源 ③.极性:“白底黑点”提取的区域为白色背景中的黑色区域;“黑底白点”提取的区域为黑色背景中的白色区域; ④.最小面积:设
康耐视visionpro-CogAcqFifoTool工具详细说明
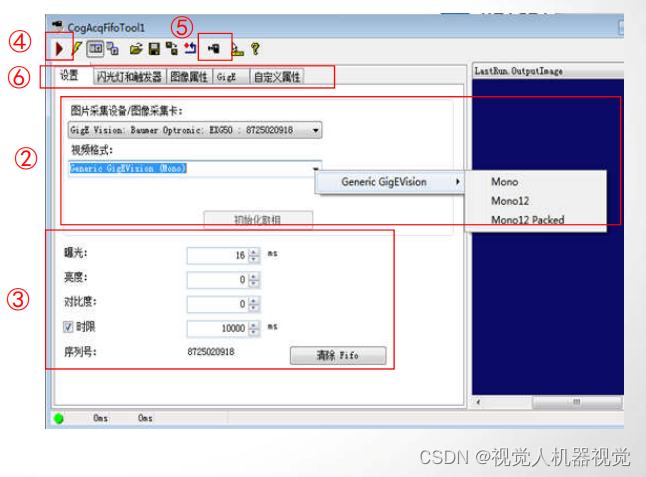
CogAcqFifoTool操作说明: ① 打开工具栏,双击或点击鼠标拖拽 添加CogAcqFifoTool ②.从图片采集设备/图像采集卡列表里选择对应的相机,视频格式选择图像格式。 Mono表示黑白图像,RGB表示彩色相机。点击初始化取相初始化相机。 ③. 设置相机的曝光时间、亮度及对比度等参数。“时限”即取图像采集超时的时限。 ④.点击运行,相机采集图像 ⑤.点击 Live Displa
康耐视visionpro-CogPMAlignTool工具详细说明
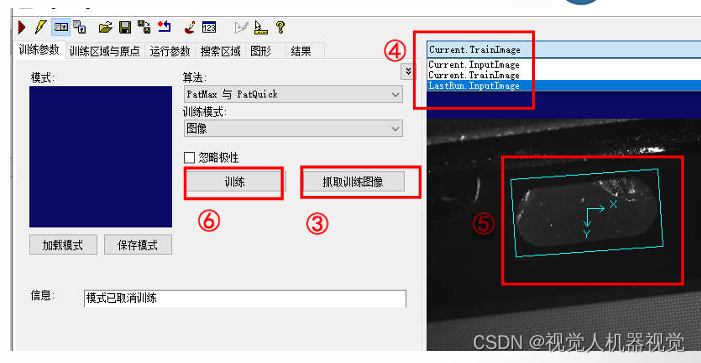
CogPMAlignTool功能: 匹配产品形状,实现产品定位。 CogPMAlignTool操作说明: 1.打开工具栏,双击或点击鼠标拖拽添加CogPMAlignTool工具 ②.添加输入图像:右键“链接到”或以连线拖拽的方式选择相应输入图像 ③.点击“抓取训练图像”按钮获取训练图像 ④.在图像下拉列表中,选择“Current.TrainImage”训练图像 ⑤.拖动图像上的训练图形ROI,
康耐视智能相机IS2000与三菱PLC走MC协议通讯设置详细步骤及案例详解
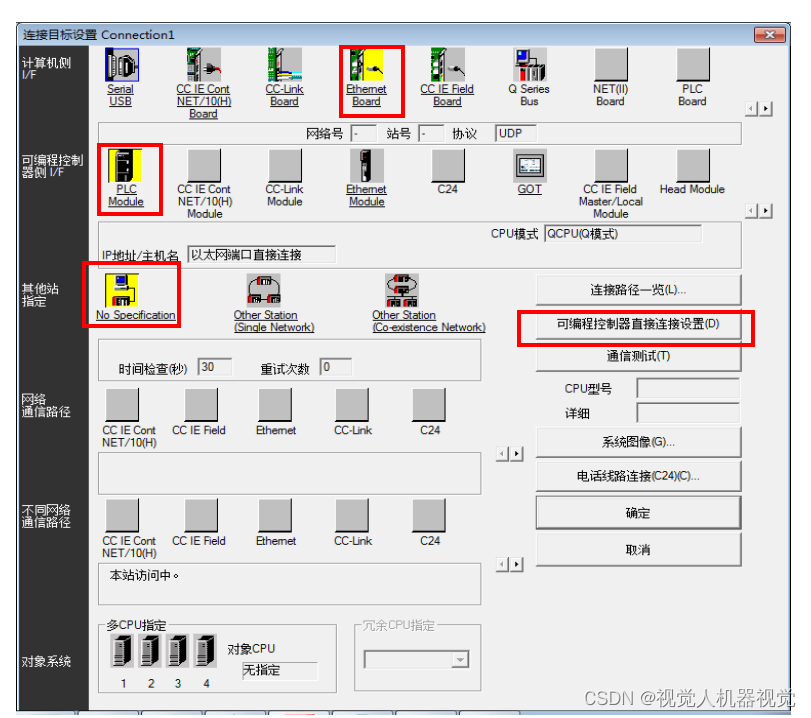
1.IS2000(SLMP扫描界面)设置如下: 控制器类型:PLC型号 IP地址:PLC地址 主机端口:16进制下的PLC通讯端口 2、IS2000设备寻址界面设置如下: 六大控制块存放区域根据PLC设定,偏移量及设备数可更改。3.打开GX WORKS软件,选择新建工程,点击“确定”,界面如下: 4.点击“连接目标”,再双击Connection: 5、连接目标设置如下,点击“可编程控制器直接连接
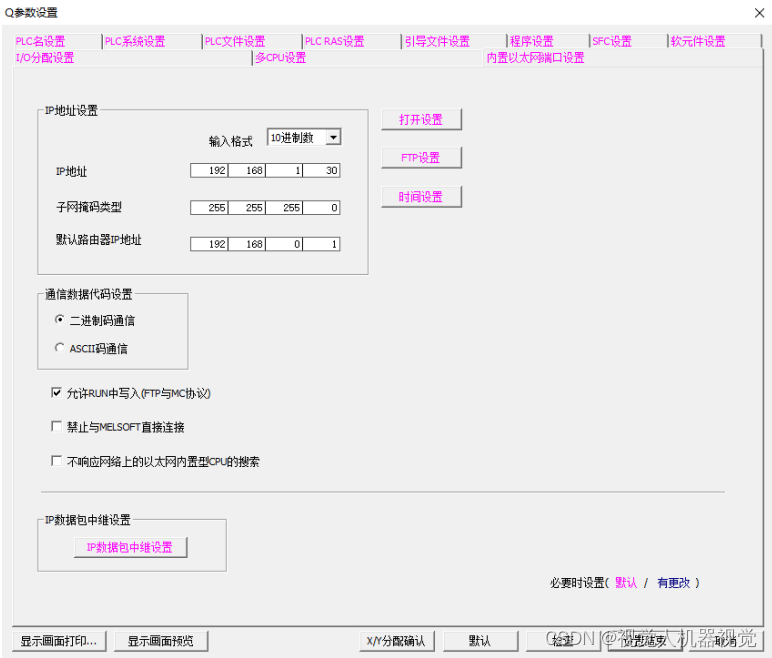
康耐视Designer,通过VC5与三菱Q系列PLC-SLMP通讯说明
海康visionmaster-颜色区分任意选 测试使用软件版本 Designer Version: 2.7 GX Works2 Version: 1.77F 测试使用硬件 Cognex Vision Controller VC5 CIC-5000R Mitsubishi PLC: Q06UDEHCPU PLC端设置(内置以太网口型号) 1.新建一个工程,选择对应的

康耐视深度学习ViDi-ViDi四大工具之一蓝色定位工具/Locate
目录 工具介绍使用步骤说明调整工具ROI添加特征标签生成定位姿态训练并审核模型编辑器参数说明 蓝色定位工具/Locate工具 工具介绍 蓝色定位工具用于识别和定位图像中的特定特征或特征组。该工具的输出可用于为其他ViDi 工具提供位置数据。使用该工具时,您提供图像训练集,然后指定图像中的特征。将生成模型,模型定义特征组之间的空间关系(如果指定的特征多于一个)。然后在未经训
康耐视深度学习ViDi-Tool菜单介绍
Train 训练该工具中所有标注的图像 Process 处理该工具中所有的图像 Abort 中止当前训练或处理任务 Rename 更改当前工具的名称 Clone 克隆当前所选工具 Import导出当前所选工具 Export导入相对应的工具 Edit Models编辑工具中的模型 Update Parameters更新当前工具参数 工具菜单会根据所选择的工具的不同,设置略有差异,在此 只针对每一个
康耐视深度学习ViDi-Tool菜单介绍
Train 训练该工具中所有标注的图像 Process 处理该工具中所有的图像 Abort 中止当前训练或处理任务 Rename 更改当前工具的名称 Clone 克隆当前所选工具 Import导出当前所选工具 Export导入相对应的工具 Edit Models编辑工具中的模型 Update Parameters更新当前工具参数 工具菜单会根据所选择的工具的不同,设置略有差异,在此 只针对每一个

康耐视深度学习ViDi-ViDi四大工具介绍与主要用途
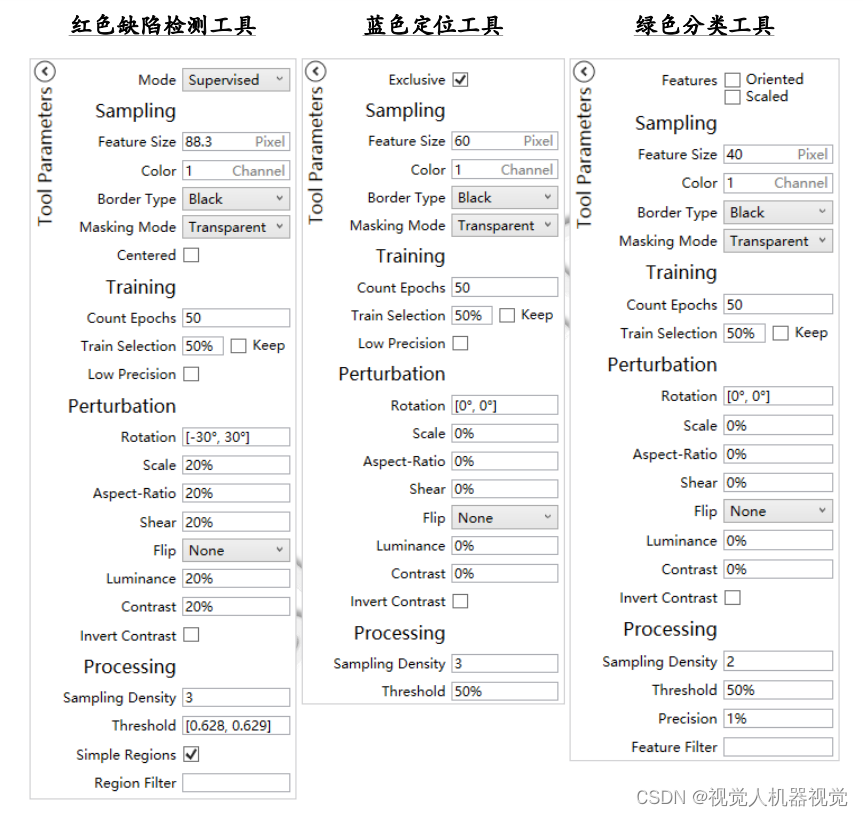
Cognex ViDi 工具是一系列机器视觉工具,通过深度学习解决各种难以解决的挑战。虽然这些工具共享一个引擎,但它们在图像中寻找的内容不同。更具体地说,在分析单个点、单个区域或完整图像时,每个工具都有不同的侧重点。 Locate,定位工具也称为蓝色工具 Cognex ViDi 蓝色定位工具用于查找和定位图像中的单个或多个特征。无论是嘈杂背景中的小特征还是零散复杂对象;蓝色定位工具都可以通过学习
康耐视深度学习ViDi-Plugins菜单介绍
Manage Plugins ----------- 插件管理 能够在此窗口界面看到一些关于插件的信息,也能够在此窗口界面添加或移除(*.dll)文件。 注意: 在没有专业人员指导的情况下禁止操作添加和移除(*.dll)文件,错误的操作有可能会造成软件的功能丧失更严重的有可能使软件无法使用。 Documentation -----------打开网页格式的帮助文档 该文档拥有关于ViDi
康耐视深度学习ViDi-Workspace菜单介绍与Workspace侧拉菜单
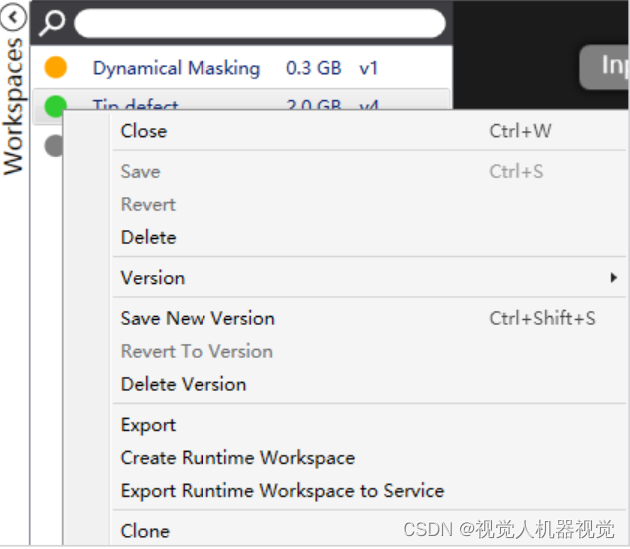
Workspace菜单介绍 New ------- 新建一个程序,点击后会呼出如下窗口,输入需要建立的程序的名字。然后点击OK按钮,就会建立一个新的程序。 Save --------- 保存当前的程序 Close -------- 关闭当前的程序 Delete ------ 删除当前的程序 Save New Version ------ 保存为新 的程序版本 Revert To Version
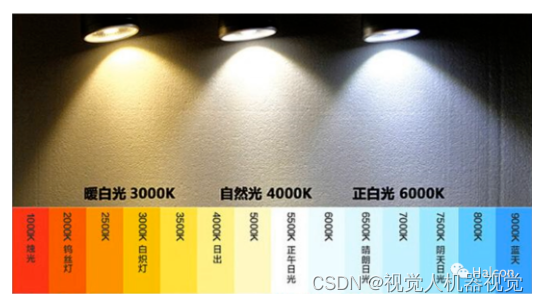
为什么做白平衡?康耐视Visionpro和Basler pylon,海康MVS如何做白平衡-三种软件相同条件下,白平衡效果一样?
海康机器视觉Visionmaster-距离与角度测量 为什么会有白平衡这个问题? 因为不同颜色的差异来自于不同波长光线的比例不同。 由于在不同色温下各种波长光纤比例的不同,造成白色在高色温的光线照射下显得较蓝,在低色温度的光线下显得较黄。如下图: 问题:在相同条件下,康耐视Visionpro和Basler pylon,海康MVS做白平衡,白平衡效果一样吗? 条件指的是:光源