adas专题
保隆科技半年报:净利同比下滑近两成,ADAS/空悬业务仍亏损
2024年上半年,在全球产业链调整、局部战争仍未平息等事件长期影响下,叠加主要经济体货币政策调整、债务风险上升等周期性因素,全球经济复苏面临较大不确定性,汽车市场尚处在缓慢恢复阶段。 这也导致不少汽车零部件上市公司的半年报财务数据普遍出现营收增速下滑,甚至是负增长;净利润大幅下滑,甚至是亏损的情况。同时,持续增长的研发投入、人力成本以及终端车企降本效应的凸显,企业经营压力仍在持续上升。

ADAS---基于检测框的单目测距方法
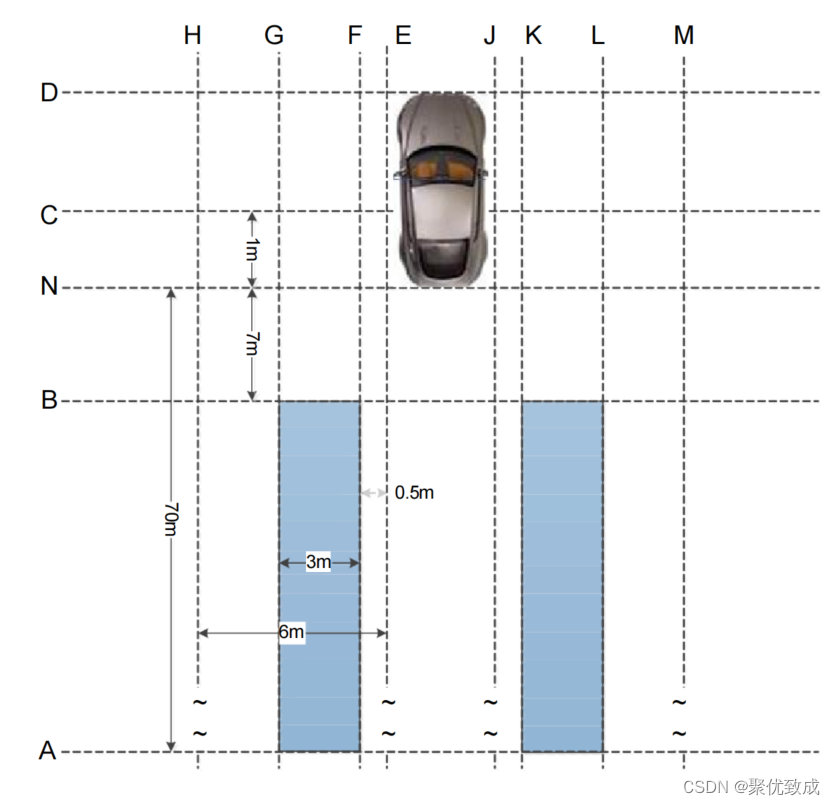
1.1.模型求解法方法解读: Yolo模型可以输出被检测物体的置信度、类别及检测框的中心点坐标(xc,yc)及宽高(w,h)等信息,选取车辆检测框底部的中点作为距离测量的特征点,其计算公式如下: 车辆测距示意图如下: 图中,为相机靶面中心点,为相机光心,车载相机安装高度为 H,焦距为 f,俯仰角为β,为 γ,点与光轴投影的夹角为。为点到点的水平距离,;为点与图像中心点的垂直距离,。为
ADAS汽车芯片LPDDR4 SIPI联合仿真案列
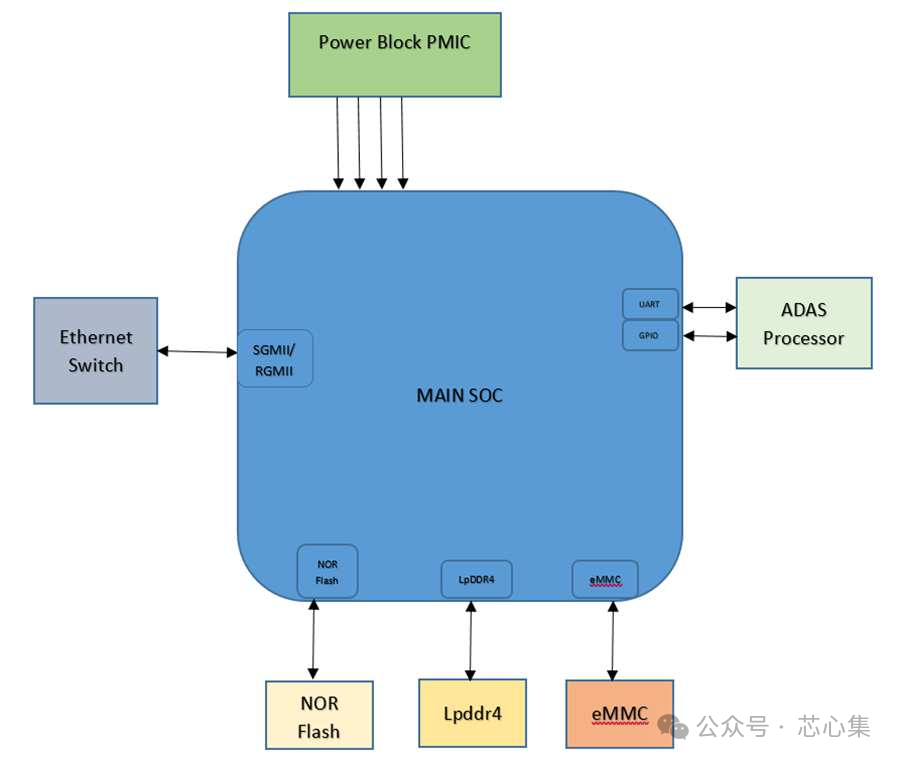
目前LPDDRn/DDRn用于许多汽车应用,如高级驾驶员感知系 统(ADAS)、信息娱乐、自动驾驶汽车系统、平视显示器和仪表控制台等显示器,这些应用需要强大的处理器,需要带宽和内存容量来生成大量数据。这就需要电源和信号设计足够的健壮来适应不同的应用场景。上一篇文章中(LPDDR4x的系统级SI-PI协同仿真)也简单介绍了电源信号联合仿真的方法,这次选择了一个实际案例进行分析。

专业的ADAS测试记录仪ETHOS 2
随着ADAS驾驶辅助系统技术的快速发展及日臻成熟,近年来ADAS在全球汽车市场已开始快速普及和商业化,而如何确保ADAS系统的可靠和安全俨然成为汽车领域的重要问题。因此,ADAS驾驶辅助系统的测试也成为了各大整车厂及零部件厂商所关注的焦点。 一 ADAS测试面临的挑战 以Google智能汽车简图为例。它包含64束的激光雷达、车载雷达、2个照相机、2个红外照相机和GPS定位装置等传

车载终端叉车_车载人脸识别ADAS行为识别解决方案
智能车载终端的广泛应用为叉车行业注入了新的活力,提升了驾驶安全和效能。通过采用多种验证技术,如指纹、人脸、扫码和刷卡等,智能车载终端实现了对司机操作权限的验证,在叉车启动时能够自动检测安全带的状态。如果驾驶员未系安全带,叉车将无法启动,确保了驾驶员系好安全带后才能进行操作。这项功能的实施有效避免了驾驶员因疏忽而忽略安全带的使用,为驾驶员的生命安全提供了重要的保护。 其次,智能车载终端能够

使用立体视觉作为 3D LiDAR 的替代方案,在 KITTI ADAS 立体视觉数据集上微调立体变换器 (STTR) 模型-含数据集+源码资料下载
为什么是立体视觉? ADAS 立体视觉是指使用两个摄像头(类似于人眼)从略有不同的角度捕获图像的技术。该设置模仿人类双眼视觉,使系统能够感知环境的深度和 3D 结构。 立体视觉的关键技术方面 ADAS 立体视觉具有多种优势和高度复杂的功能。让我们探索它们以更好地理解: 对极几何和深度估计:立体视觉依赖于对极几何,这是计算机视觉中的一个基本概念,描述了立体设置的两个视图之间的几何关系。通过

ADAS多传感器后融合算法解析-下篇
ADAS多传感器后融合算法解析-下篇 在ADAS多传感器后融合(上)中我们介绍了后融合的接口、策略。本文将主要介绍后融合的实现流程、难点及注意事项。 附赠自动驾驶学习资料和量产经验:链接 二、后融合处理流程 如下图为基本RC后融合系统流程图,接下来将介绍各个模块: 如下图为Apollo融合部分代码UML图,代码层序清晰,BaseDataAssociation、BaseTracke

ADAS多传感器后融合算法解析-上篇
ADAS多传感器后融合算法解析-上篇 附赠自动驾驶学习资料和量产经验:链接 ADAS系统是一种高自动化的软件应用,对系统的鲁棒性与可靠性要求很高,单一传感器往往存在一定限制,此时便需要多传感器融合。多传感器融合会带来如下收益: 可以在部分场景提升整体感知精度。 某一传感器出现错误/失效时可以使用另一传感器进行补偿。 多传感器可以扩大FOV范围。 在论文《A Review of

ADAS DVPV 试验测试台架的方案分享:DVPV试验需求 | 自动化试验测试台架技术方案 | 自动化试验测试台架系统框架 | 测试策略管理软件TPT | ADAS传感器数据采集及回灌
为了在当下高速发展的自动驾驶中始终保持产品核心竞争力,各厂商皆迫切持续改进现有产品并迭代新兴技术,而快速的产品迭代并量产容易导致产品问题频出,进而引发现场故障、高昂售后、产品召回、品牌危机等问题。 设计验证试验(DV-Design Verification)及产品验证试验(PV-Product Validation)是一种有效的工程手段来尽量消除潜在失效模式出现在未来产品中,并确保产品的功能、性

面向ADAS/AD应用,打造独特的转向手感:主要特性 | 针对测试环境进行优化和验证 | 软硬件接口信息 | 模块化设计 | 基础模块 | 执行电机 | 接口模块 | 实验室的测试数据 | 使用场景
文章目录 MXsteerHiL的主要特性MXsteerHiL 针对以下测试环境进行的优化和验证手动驾驶:辅助和自动驾驶: MXsteerHiL-软硬件接口信息MXsteerHiL的模块化设计MXsteerAct—基础模块MXsteerMot-执行电机MXsteerCon—接口模块MXsteerHiL-实验室的测试数据MXsteerHiL的使用场景驾驶体验的应用-静态驾驶模拟器驾驶体验的运用-

完成近亿元融资!辅易航前装ADAS前装量产超30款车型
随着智能驾驶前装搭载率的持续攀升,资本市场保持活跃度。高工智能汽车研究院监测数据显示,中国市场(不含进出口)前装搭载ADAS交付1238.06万辆,同比增长23.65%。 其中,低速自动泊车功能前装标配交付350.34万辆,同比增长24.80%;同时受益于行泊一体功能上车加速,带动泊车功能需求持续上升。 近日,辅易航智能科技(苏州)有限公司正式完成近亿元融资,由元禾重元、苏高新金控联合领投。

自动驾驶仿真(七)—— ADAS HIL仿真测试及基于CANoe的交通信号灯仿真
自动驾驶仿真七——ADAS HIL仿真测试及基于CANoe的交通信号灯仿真 1. ADAS HIL仿真测试1.1 HIL仿真测试工具链1.2 摄像头暗箱仿真测试 2. CANoe软件仿真2.1 简单的开关和灯仿真实例2.2 交通信号灯仿真实例 3. 参考学习的书目教材 博主前面的博文已经简要介绍了Carsim、Prescan 与 Simulink 在 “V”型开发中MIL、SIL的应
ADAS感知摄像头的分辨率与帧率选择分析
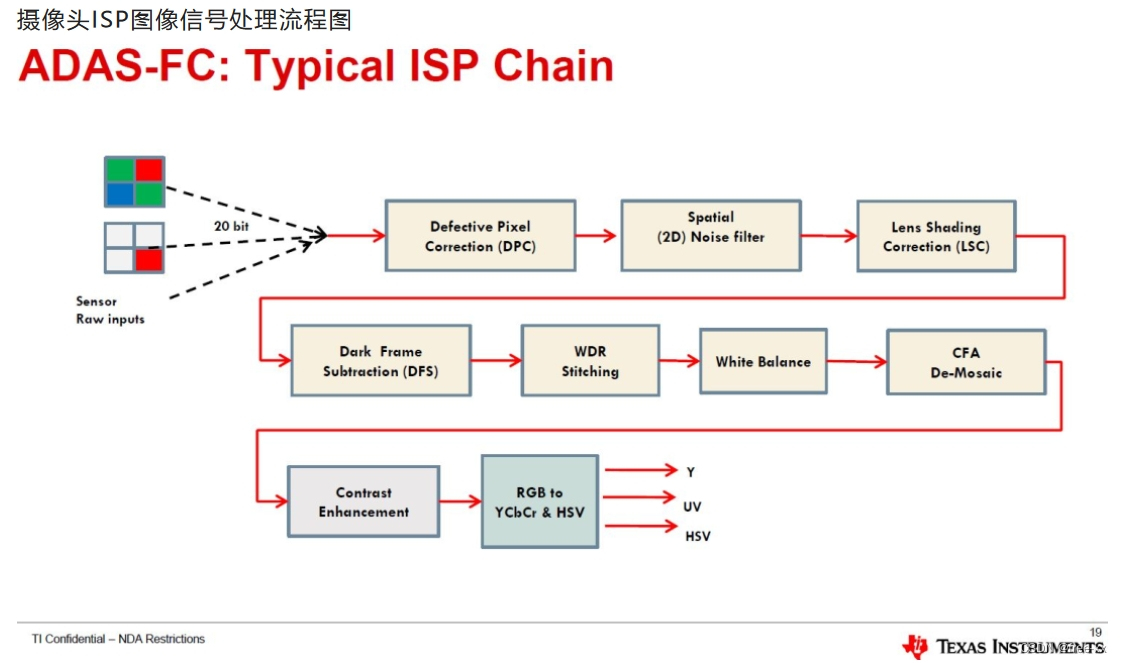
说明:可以作为对智能驾驶爱好者对摄像头参数理解或者从业工程人员对设计硬件选型参考 前言 在当前智能驾驶中,基于摄像头的 ADAS 因其应用、更高的可靠性和对新要求的适应性而被广泛采用。 ADAS 摄像头通常部署在汽车的前部、侧面和后部,提供驾驶和停车辅助。 前置摄像头系统最常安装在汽车的前部,后视镜后面。 后置摄像头安装在靠近车牌的后侧,而侧面摄像头安装在汽车两侧靠近镜子的位置 《
汽车电子 -- 车载ADAS之FCW(前方碰撞预警)
相关法规文件: FCW: GB∕T 33577-2017 智能运输系统 车辆前向碰撞预警系统 性能要求和测试规程 JT_T 883-2014营运车辆行驶危险预警系统 技术要求和试验方法 一、前方碰撞预警 FCW( Forward Collision Warning) 参看:法规标准-GB/T 33577标准解读(2017版) 1、状态机 系统关闭 当车辆前向碰撞预警系统处于关闭
风丘科技为您提供完整的ADAS测试方案
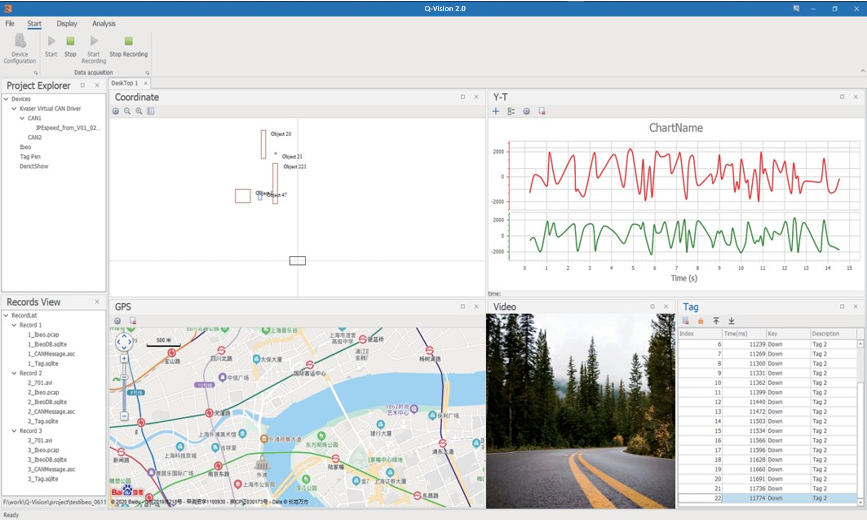
一 方案概述 随着5G通讯与互联网+的快速发展,智能汽车和ADAS辅助系统的研究与发展在世界范围内也在如火如荼地进行。风丘科技紧跟时代脚步,经多年积累沉淀,携手整车厂与高校共同研发打造出了一套完整且适用于国内ADAS测试的系统方案。 | ADAS测试面临的挑战: • 信号种类多,数据量大: ADAS测试需要大量的传感器,数据量巨大,而普通的存储设备无法满足其存储要求。 • 多种上
人工智能利用深度学习技术增强高级驾驶辅助系统(ADAS)
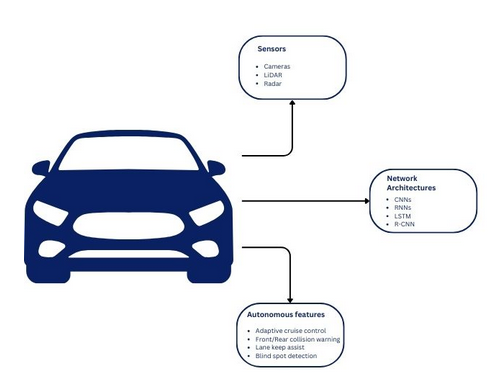
深度学习通过实时传感器数据增强高级驾驶辅助系统(ADAS),实现精确的物体检测、碰撞预测和主动决策。 人工智能和机器学习利用深度学习技术的优势,使高级驾驶辅助系统(ADAS)发生了重大变革。ADAS在很大程度上依赖深度学习来分析和解释从各种传感器获得的大量数据。摄像头、激光雷达(光探测和测距)、雷达和超声波传感器都是传感器的一些例子。这些传感器从车辆周围环境中实时收集的数据包括图像、视频和传感器
羊羊日记——从ADAS到无人驾驶(科普篇)
一、ADAS功能分类 按照技术分类,ADAS分为辅助预警类、主动控制类和其他辅助驾驶。 参考文章:博主“打怪升级ing”的文章——ADAS各功能模块及ADAS解决方案提供商详解 我爱研发网的文章——ADAS市场巨大,你站好队了吗? 二、ADAS功能介绍 参考文章:博主“Peter盼”的文章——ADAS总结。 博主“山水之间2018”的文章——ADAS系统简介。 博主“hebb

车载测试:如何用CANape进行ADAS实车功能测试?
前言 CANape是一款用于ECU测量、标定、诊断以及ADAS传感器数据采集的工具型软件。 测量——通过CANape不仅能采集记录ECU内部信号,还支持与车辆上的各种传感器的总线进行通信。与ECU不同,ADAS传感器不提供车辆实际运行信号,而是提供车辆运行时周围环境的详细信息,如通过摄像头和雷达传感器感知周围环境。传感器感知周围环境,将车身所处环境信息传至ECU通过ADAS算法分析决策之后,控
![[ADAS预研笔记]感知算法 - 引言及常用数据集](https://img-blog.csdnimg.cn/0da204c5ca214dccadb64e450f9054ad.png)
[ADAS预研笔记]感知算法 - 引言及常用数据集
CNN用于图像分类、目标检测、语义分割等方向; RNN用于与时序相关的追踪等方向。 现代深度学习算法结构(引言) 在现代深度学习算法研究中, 通用的骨干网络(backbone)+特定任务头(head) 成为一种标准的设计模式。 背景: 图像分类算法是其他计算机视觉子任务的基础,目标检测与语义分割都会将问题逐步简化为图像分类问题;因此图像分类的算法主体被迁移过来用作特征提取,称为骨干网络(

adas功能受限_ADAS功能最全整理
从功能上分类,可以分为: 1.主动控制类ADAS:ACC/AEB/LKS等 2.预警类ADAS:FCW/LDW/PCW等 3.其他辅助性ADAS:BSD/ADB/全景泊车等 我们来逐一看一下每项功能是如何实现的。 1: 自适应巡航控制系统 Adaptive Cruise Control(ACC) 自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在

车载双目ADAS(四):双目ADAS的前装和后装市场
关于车载双目ADAS的前装和后装市场一些思考,供大家讨论: 谈到高级辅助驾驶(ADAS)或者无人驾驶,几乎所有人都会认为未来市场一片光明。然而,在实现真正无人驾驶的道路上,并不会一帆风顺,摆在自动驾驶产品落地面前的两座大山无非是技术与成本。无人驾驶技术建立在环境感知技术之上,环境感知主要是利用各类传感器实现汽车的自身定位和环境建模,现有感知传感器主要有摄像头,激光雷达,毫米波雷达,超
基于苏标Adas协议的主动安全平台搭建
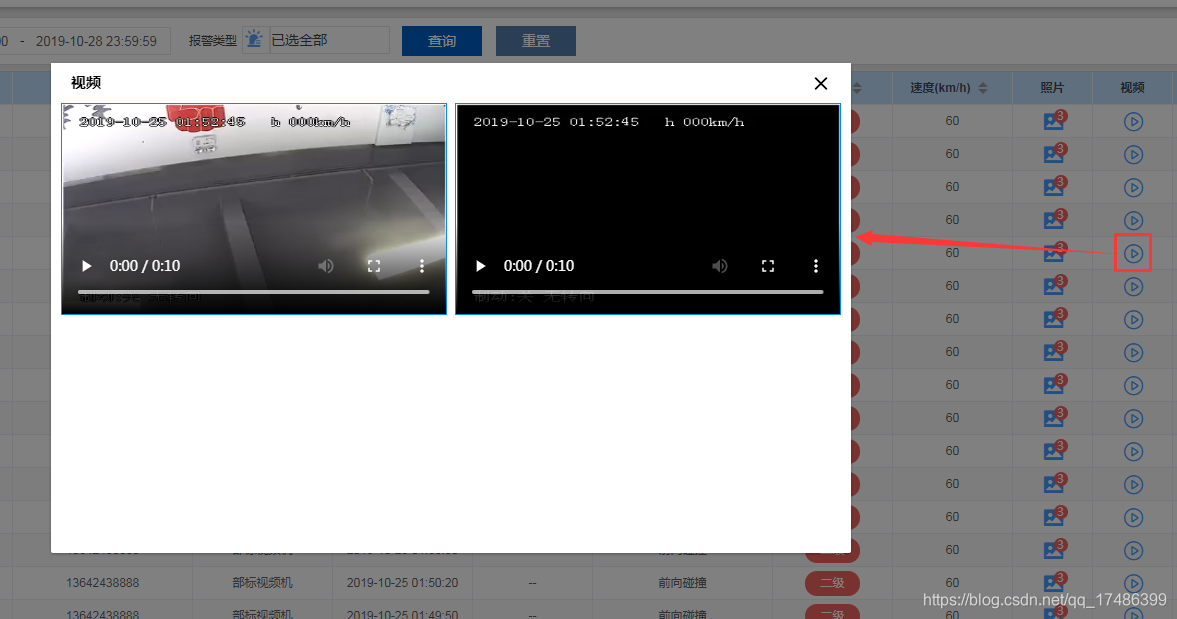
之前说过基于1078的视频监控平台,下面我们聊聊基于苏标Adas协议的主动安全平台。 苏标协议是对部标808协议的一种拓展,如果我们需要搭建苏标Adas主动安全平台,必须要先了解部标808的协议。了解过苏标协议的肯定明白,苏标是有个附件服务器的概念,其实这个附件服务器就是一个808的网关,然后根据苏标协议进行解析得到对应的报警图片,报警视频以及其他报警信息。 这个就是1078视频监控的实现效果
汽车电子 -- 车载ADAS之LCA(变道辅助系统)
相关法规文件: LCA: ISO 17387-2008 Intelligent transport systems — Lane change decision aid systems 一、变道辅助系统 LCA (Lane Change Assist) LCA 系统(变道辅助系统)监测后方相邻车道区域,如果有车辆在后方相邻车道高速靠近自车时,本系统会对驾驶员提供报警。 1、报警区域