本文主要是介绍ADAS汽车芯片LPDDR4 SIPI联合仿真案列,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目前LPDDRn/DDRn用于许多汽车应用,如高级驾驶员感知系 统(ADAS)、信息娱乐、自动驾驶汽车系统、平视显示器和仪表控制台等显示器,这些应用需要强大的处理器,需要带宽和内存容量来生成大量数据。这就需要电源和信号设计足够的健壮来适应不同的应用场景。上一篇文章中(LPDDR4x的系统级SI-PI协同仿真)也简单介绍了电源信号联合仿真的方法,这次选择了一个实际案例进行分析。
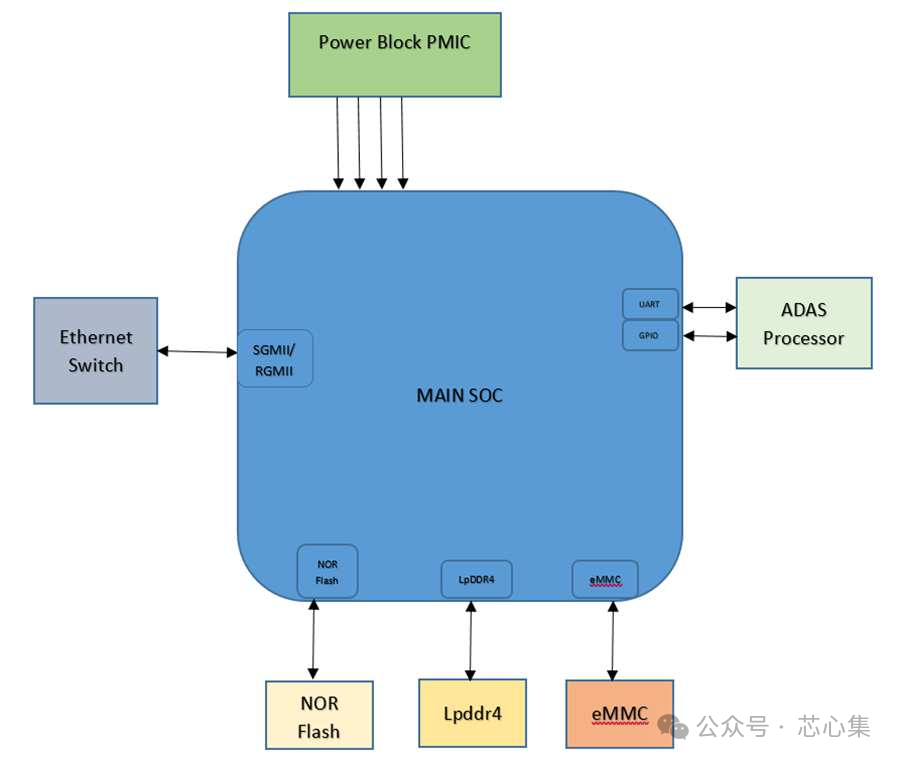
图1 汽车芯片ECU架构
电源PDN网络
电源PDN由从电压调节器模块(VRM)到集成电路(IC)内部PAD的所有互连组成,包括电源路径中的通孔、平面、电容器等。电源电压由VRM产生,由于寄生电感,VRM本身无法满足负载的高瞬态需求,这个时候就需要PDN的其他组件能支持IC在不同频率下的开关电流需求。图2显示了整个PDN组成
这篇关于ADAS汽车芯片LPDDR4 SIPI联合仿真案列的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!