本文主要是介绍汽车电子 -- 车载ADAS之LCA(变道辅助系统),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
相关法规文件:
- LCA:
ISO 17387-2008 Intelligent transport systems — Lane change decision aid systems
一、变道辅助系统 LCA (Lane Change Assist)
LCA 系统(变道辅助系统)监测后方相邻车道区域,如果有车辆在后方相邻车道高速靠近自车时,本系统会对驾驶员提供报警。
1、报警区域
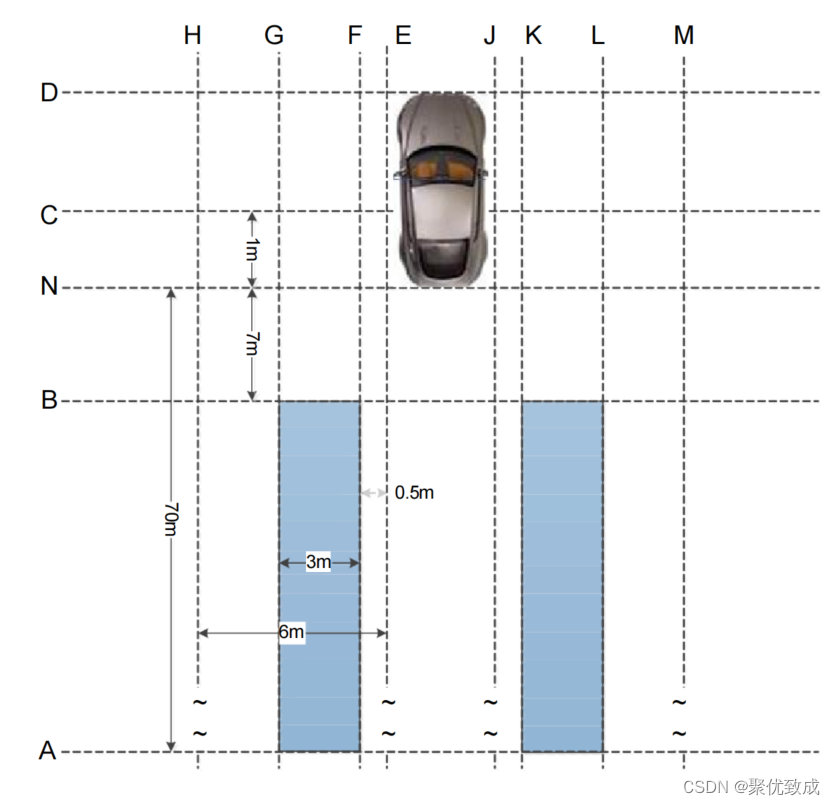
- 左侧区域定义为 F 线左边,G 线右边和 B 线(左侧)后方以及 A 线(左侧)前方的区域
- 右侧区域定义为 K 线右侧,L 线左侧和 B 线(右侧)后方以及A 线(右侧)前方的区域。
以上就可以划定左侧报警区域为:
横向:0.5m ~ 3.5m
纵向:-70m ~ -7
2、功能需求
1、车速范围:10km/h-150km/h,
2、档位:D档(前进挡)
3、弯道半径:125m 以上
4、报警触发:
- 目标车辆全部在B 线之后。
- 左边的横向距离:目标车辆的任何部分在 G 线的右边但是在 F 线的左边。
- 右边的横向距离:目标车辆的任何部分在 L 线的左边但是在 K 线的右边
- 目标车辆的估计碰撞时间(TTC)≤3.5s
这篇关于汽车电子 -- 车载ADAS之LCA(变道辅助系统)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







