变道专题

Carla自动驾驶仿真九:车辆变道路径规划
文章目录 前言一、关键函数二、完整代码效果 前言 本文介绍一种在carla中比较简单的变道路径规划方法,主要核心是调用carla的GlobalRoutePlanner模块和PID控制模块实现变道,大体的框架如下图所示。 一、关键函数 1、get_spawn_point(),该函数根据指定road和lane获得waypoint(这里之所以这么用是为了选择一条比较
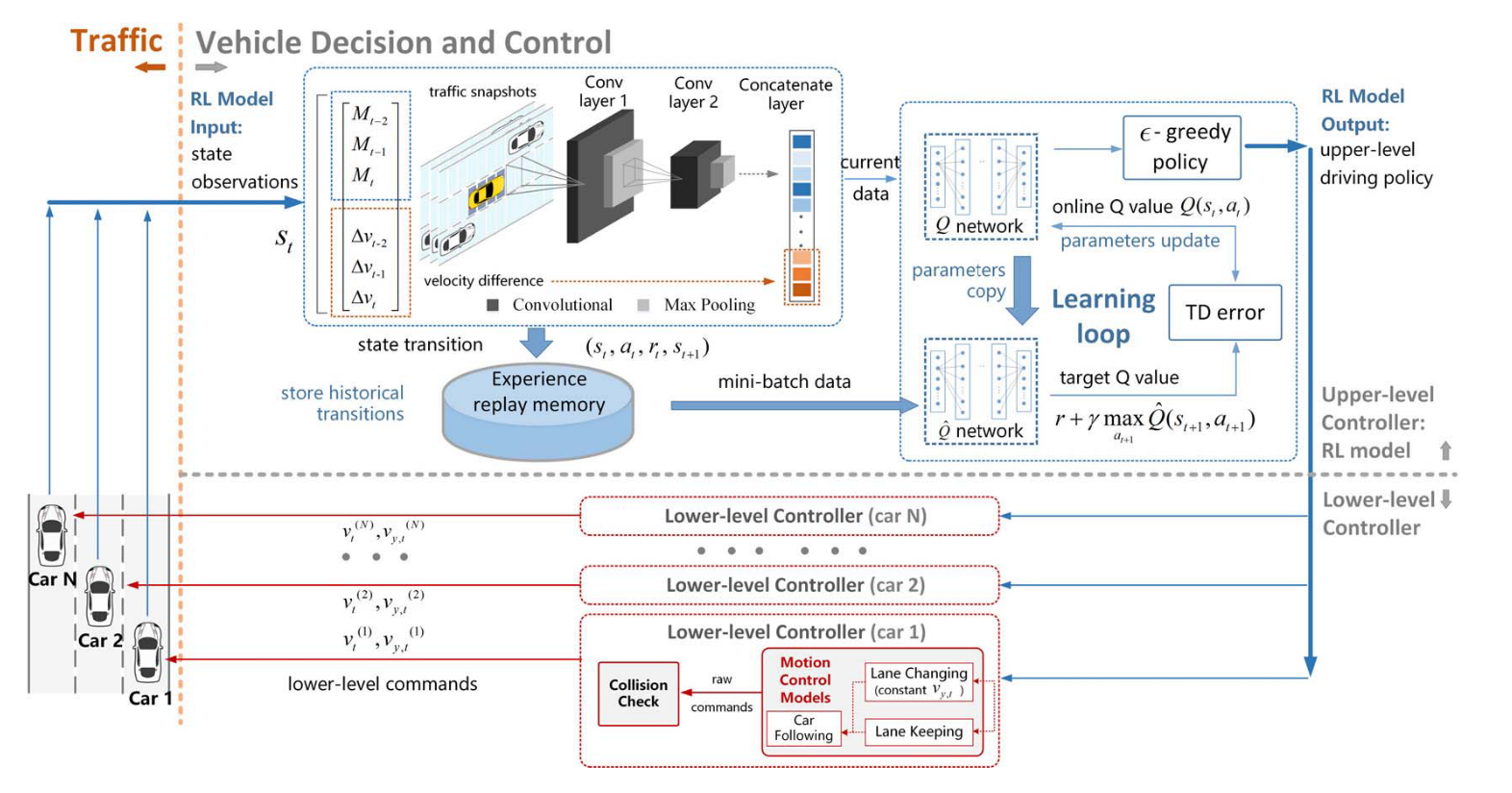
深度强化学习的变道策略:Harmonious Lane Changing via Deep Reinforcement Learning
偏理论,假设情况不易发生 摘要 多智能体强化学习的换道策略,不同的智能体在每一轮学习后交换策略,达到零和博弈。 和谐驾驶仅依赖于单个车辆有限的感知结果来平衡整体和个体效率,奖励机制结合个人效率和整体效率的和谐。 Ⅰ. 简介 自动驾驶不能过分要求速度性能, 考虑单个车辆的厌恶和所在路段的整体交通效率的奖励函数,适当的混合以提高整体的交通效率。 章节安排: 简介 和谐变道的深
to B变道to C,优信二手车的下一阶段怎么跑?
文丨陈选滨 来源丨智能相对论(ID:aixdlun) 在二手车电商的赛道上,戴琨似乎是一个兢兢业业的赌徒。 他在接受36氪的专访时,曾有一段比较有意思的对话,引用如下: “二手车究竟是一个线上的生意,还是一个线下的生意?” “这个事情我愿意赌一把,我觉得它可以线上化。” “赌”是戴琨在回应二手车电商市场与优信发展问题上多次提及的一个词,并非是此次专访中的特例。 不知是有意,还是无

打灯变道,难倒一大批车企
做一项好用的打灯变道功能,这个任务难倒了一大批车企。 如果你的车售价在20万元以下,那打灯变道基本上和“好用”二字无缘了,仅仅可以算得上“能用”,它可能会经常出现“想变道时变不过去、不想变道瞎变”的情况。 只有那些售价超过20万元的车,才有机会体验到相对好用的打灯变道功能。这里的好用,指的是打灯变道过程中体感舒适,你会感觉到自己的车像个老司机一样,可以在和相邻车道的车辆博弈后轻松胜出。 为什

matlab变道超车_浅论基于支持向量机的驾驶员超车意图识别论文
浅论基于支持向量机的驾驶员超车意图识别论文 随着各种车载电子设备、导航设备、手机和其他远程信息处理设备的日益普及,这些设备分散着驾驶员的注意力,使驾驶过程中的危险性增加,为此,人们正致力于发展半自动或全自动化的驾驶辅助系统,如使用驾驶员辅助系统(ADAS)的车道偏离警告(LDW)和车道变换辅助(LCA).但在未知驾驶员驾驶意图的情况下,这些辅助系统容易出现错误,如误报警等.所以系统在感知驾驶员驾
汽车电子 -- 车载ADAS之LCA(变道辅助系统)
相关法规文件: LCA: ISO 17387-2008 Intelligent transport systems — Lane change decision aid systems 一、变道辅助系统 LCA (Lane Change Assist) LCA 系统(变道辅助系统)监测后方相邻车道区域,如果有车辆在后方相邻车道高速靠近自车时,本系统会对驾驶员提供报警。 1、报警区域
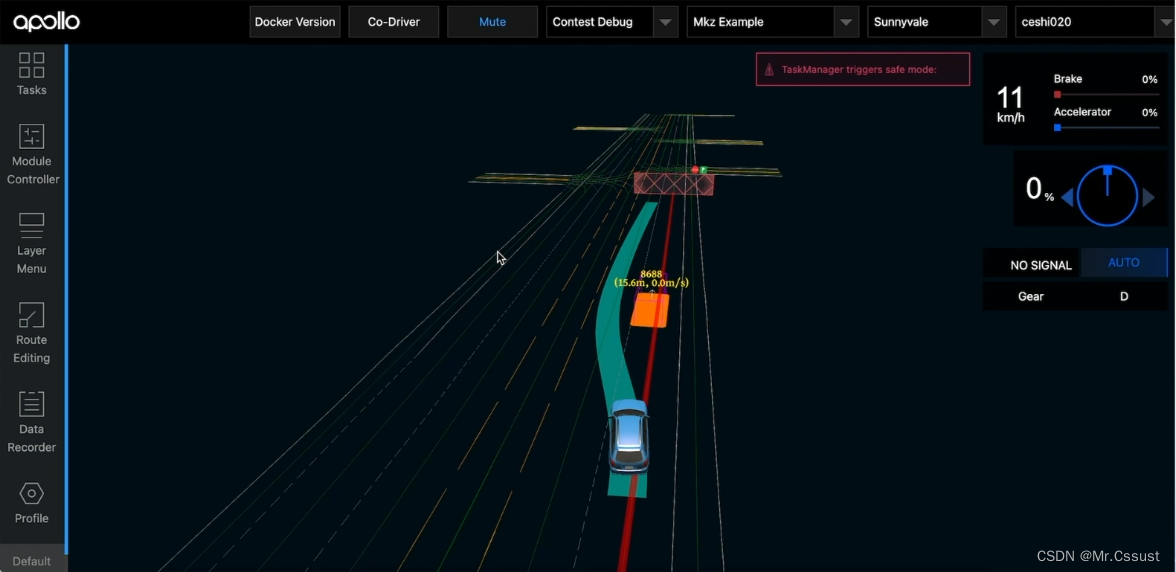
自动驾驶学习笔记(四)——变道绕行仿真
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《2023星火培训【感知专项营】》免费课程—>传送门 文章目录 前言 仿真内容 启动Dreamview 开启Sim Control 下载场景 开启调试模块 路径仿真 Tips 总结 前言 见《自动驾驶学习笔记