镜头专题

机器视觉硬件选型根据某项目相机镜头
一 项目总需求 1、大视野检测需求: (1)大视野: ①产品尺寸15.6寸屏幕,产品大小:350mm x 225mm; ②产品料盘尺寸大小:565mm x 425mm; ③工作距离:880mm;检测精度:500μm; 1、大视野检测需求: (1)大视野: ①产品尺寸15.6寸屏幕,产品大小:350mm x 225mm; ②产品料盘尺寸大小:565mm x 425mm; 工作距离:

AVfoundation中焦距的设置(slider实现拉近拉远镜头)
首先设置一个slider UISlider focusSlider = [[UISlideralloc]initWithFrame:CGRectMake(60,_bottomView.frame.origin.y-60,200,20)]; [focusSlideraddTarget:selfaction:@selector(AdjustFocusAction:)forCont
如何理解广角镜头和长焦镜头的区别。
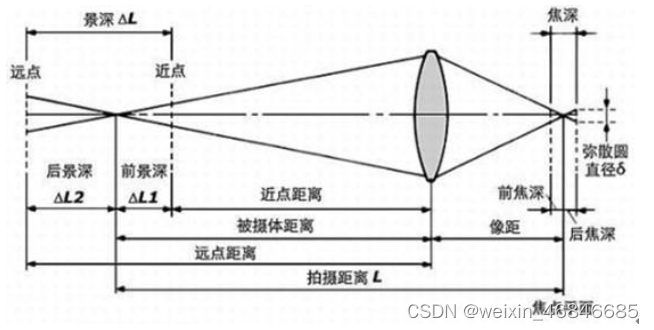
为什么广角镜头的视野会比长焦镜头的视野大呢? 我之前用等光程解释了景深,也解释了为什么焦距越远,成像越大,但是从来没有提到过视野范围这个概念。实际上在我之前建立的数学模型中,物曲面S是无限大的,像曲面S1也是无限大的。但是实际的照相机中,照片是被框住了的,也就是像曲面S1的大小是固定的,那么怎样使得在S1固定的情况下,物曲面S尽可能的大呢? 首先,根据费马原理,这是个非常好用的原理,
标准的镜头质量评测方法——MTF(Modulation Transfer Function)
https://zhuanlan.zhihu.com/p/21318769; 这话和星座一样准,认识的几个常旅客都喜欢带着相机出门 今天就来聊聊选镜头的重要指标之一 MTF,不想看科普的可以直接拖到最后看结论 人眼评价镜头可能会众说纷纭,MTF图提供了一种把镜头质量 量化 的标准方法 在各种镜头页面中都会看到类似这样的图 纵坐标是 MTF 的对比度, 取值 = 拍摄画面 / 实
工业镜头孔径、分辨率与景深参数简析
工业镜头孔径、分辨率与景深参数简析 一、前言二、镜头孔径与光圈系数2.1孔径与相对孔径2.2数值孔径(NA)2.3光圈系数(F/#)2.4工作光圈系数((F/#)w) 三、镜头分辨率3.1MTF与CTF3.1.1MTF(调制传递函数,Modulation Transfer Function)3.1.2CTF(对比度传递函数,Contrast Transfer Function) 3.2空间频

光学基础 -- 光学术语之平场矫正、光学串扰、镜头渐晕
光学术语文档 1. 平场矫正 (Flat Field Correction) 定义: 平场矫正是一种图像处理技术,用于校正由于照明不均匀或相机感光元件响应不一致而引起的图像亮度不均匀现象。 用途: 平场矫正主要用于消除由于设备或环境引起的图像瑕疵,确保图像的亮度和对比度一致。 英文: Flat Field Correction 2. 光学串扰 (Optical Crosstalk) 定义:
【鱼眼镜头11】Kannala-Brandt模型和Scaramuzza多项式模型区别,哪个更好?
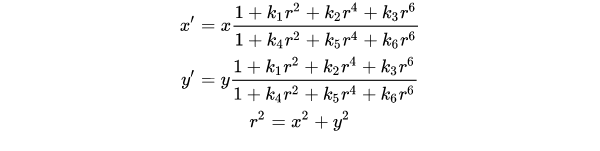
Kannala-Brandt模型和Scaramuzza多项式模型在描述鱼眼相机畸变时都有其特定的数学表示和应用,但它们之间存在一些区别。以下是对两者区别的分点表示和归纳: 数学表示: Kannala-Brandt模型:它假设图像光心到投影点的距离和角度的多项式存在比例关系。具体地,它涉及到相机坐标系、图像坐标系、物点坐标、入射角、畸变像点和非畸变像点等参数,并通过这些参数之间的关系来描述径向畸
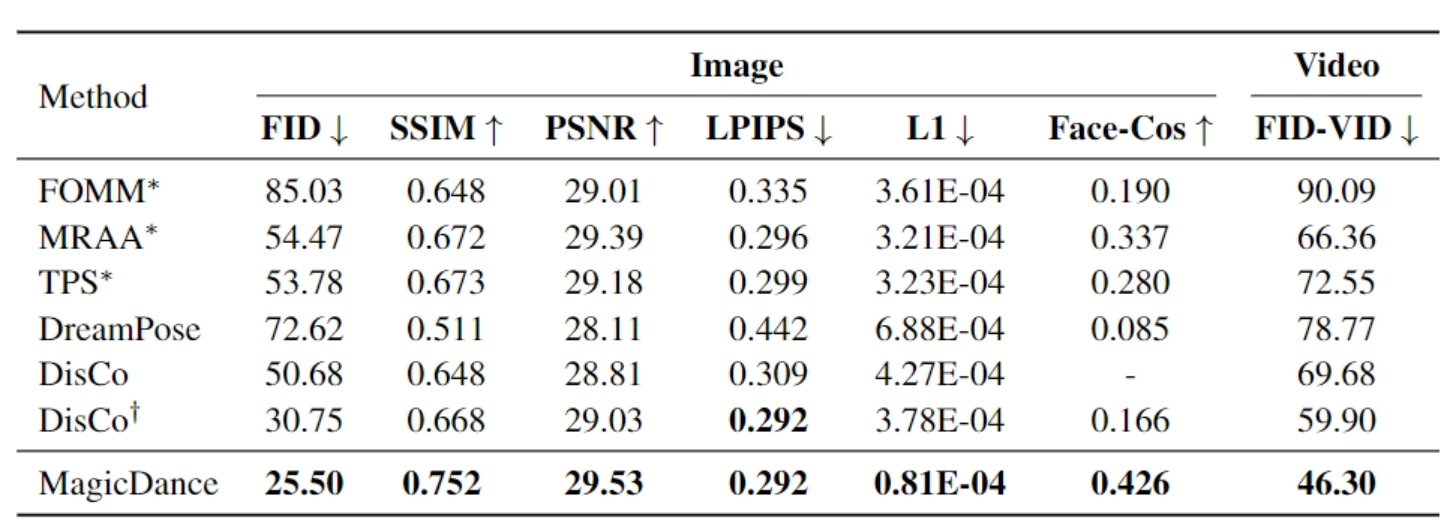
南加州大学字节提出MagicPose,提供逼真的人类视频生成,实现生动的运动和面部表情传输,以及不需要任何微调的一致的野外零镜头生成。
MagicPose可以精确地生成外观一致的结果,而原始的文本到图像模型(如Stable Diffusion和ControlNet)很难准确地保持主体身份信息。 此外,MagicPose模块可以被视为原始文本到图像模型的扩展/插件,而无需修改其预训练的权重。 相关链接 论文链接:https://arxiv.org/pdf/2311.12052.pdf 项目链接:https://githu


使用OpenCV标定鱼眼镜头(C++)
使用OpenCV标定鱼眼镜头(C++) 本人邮箱:sylvester0510@163.com,欢迎交流讨论, 欢迎转载,转载请注明网址http://blog.csdn.net/u010128736/ 一、使用的函数 由于鱼眼镜头和针孔镜头的模型不一样,对于鱼眼镜头的模型在之前的博客中已经做了详细介绍,这里直接使用OpenCV中的cv::fisheye::calibrate(
关于海康相机和镜头参数的记录
对比MV-CS020-10UC和大家用的最多的MV-CS016-10UC 其实前者适合雷达站使用,后者适合自瞄使用 一:MV-CS020-10UC的参数 二:对比 三:海康镜头选型工具
Ansys Speos|进行智能手机镜头杂散光分析
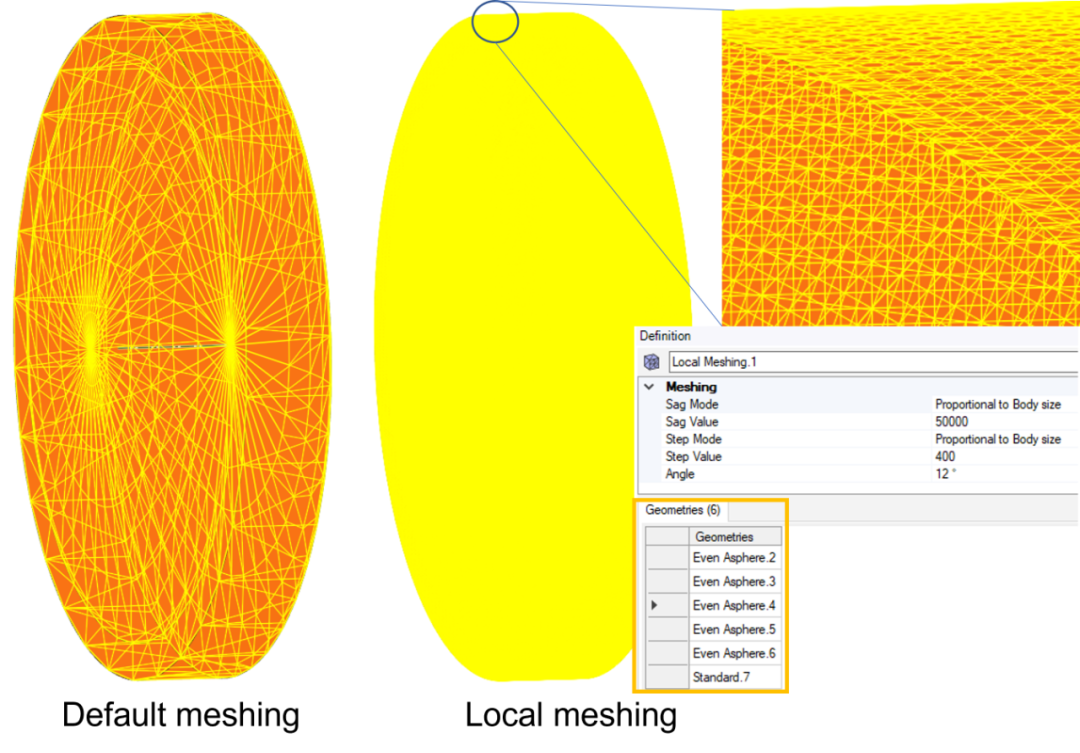
本例的目的是研究智能手机Camera系统的杂散光。杂散光是指光向相机传感器不需要的散光光或镜面光,是在光学设计中无意产生的,会降低相机系统的光学性能。 在本例中,光学透镜系统使用Ansys Zemax OpticStudio (ZOS)进行设计,并使用新的“Zemax Importer”工具一键导入镜头系统到Speos中进行系统级杂散光分析。所使用的光学机械参数和透镜边缘可以在CAD

图像处理:镜头频率(衍射极限) 和 相机采样:显微镜的采样定理
采样定理大家都知道,相信不用多说。 我自己写下来给自己看。 下面,我总结 大家平时照相的镜头或者显微镜的物镜的情况下: 采样频率是指图像在数字化的时候的过程,实际上就是我们相机感光元件CCD或者CMOS的一个个小像元把模拟的连续图像进行了数字化。 实际生活中,得到图像有两个过程: 1、镜头把物体成像到CCD(CMOS) 2、CCD输出数字化图像 从频率角度来讲,

机器视觉工程师应该了解的16个工业镜头专业术语
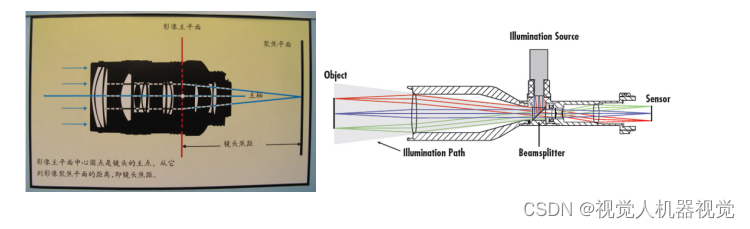
机器视觉目前已成为实现工业自动化和智能化的核心关键点之一,科技发展日新月异,机器视觉行业伴随制造业的强势崛起,受到各行业的广泛关注和充分的工业应用,下面小编给大家介绍一些常见的机器视觉工业镜头的相关专业术语。 一、远心光学系统 指主光线平行于镜头光学轴的光学系统。而光从物体朝向镜头发出,与光学轴保持平行,甚至在轴外同样如此,则称为物体侧远心光学系统。光从镜头朝向影像,与与光学轴保持平行,甚

1.MMD模型动作场景镜头的导入及视频导出
界面介绍 MIKUMIKUDANCE926版本 MMD的工具栏模型骨骼帧的窗口,在不同时间做不同动作,可以在这里打帧操作时间曲线操作窗口,控制模型两个动作之间的过渡模型操作窗口,导入模型选择模型相机操作,控制相机远近,每做完一个指令,点击注册才会保存照明操作,红绿蓝可以调整光照的颜色,xyz可以控制地面阴影的方向本影操作,用的不多附件操作,控制插件的地方视点,可以控制视角播放,可以查看预览效

机器视觉(相机、镜头、光源)全面概括——mark
1.1.1 视觉系统原理描述 机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的 图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。


随时查看更大视野,双镜头安防更可靠
在家庭安全领域,智能摄像机的应用已经变得越来越普遍。这些设备不仅提供了便捷的联网功能,还能通过手机应用进行快速管理,使得家庭监控变得简单而高效。上周为了户外的监控需要, 我新装了一台 xiaovv的一款枪球一体智能摄像机, 这款产品 通过创新的设计和先进的技术, 有效 提升 了 家庭安全保障。 这款摄像机的设计很特别,能够实现更广阔的监控视野。与传统的单摄像头智能摄像机相比,xia

工业镜头常用参数之实效F(Fno.)和像圈
Fno. 工业镜头中常用到的参数F,有时候用F/#,Fno.来表示,指的是镜头通光能力的参数。它可用镜头焦距及入瞳直径来表示,也可通过镜头数值孔径(NA)和光学放大倍率(β)来计算。有效Fno.(Effective Fno.)指当物体位于有限距离时,镜头实际的通光能力。 Fno.数值越小,镜头通光能力越强,即通俗的称为“越亮”。那么在光源和相机设置相同的情况下,镜头Fno. 和亮度的量化
机器视觉-相机镜头光源介绍及选型-12.系统选型
系统选型 ===================================================================================== 1.选型步骤: 选择相机 采集卡 选择镜头 光源 #二者结合选择 ====================================================
机器视觉-相机镜头光源介绍及选型-11.采集卡
采集卡 ============================================================================================= 1.1.定义: 将视频信号经AD转换成电脑可用数字格式,经PCI总线实时传到内存和显存。 采集卡传送数据采用PCI Master Burst方式,图像传送速度高达40MB/S,实现图像到内
机器视觉-相机镜头光源介绍及选型-9.相机概念
相机概念 ===================================================================================== 像素:感光器件上的基本感光单元,也是一幅图像的基本单元 像素深度: 每位像素数据位数,常见8bit,10bit,12bit。 分辨率和像素深度决定图像大小。增加像素深度可增强测量精度,但降低系统速度

机器视觉-相机镜头光源介绍及选型-8.镜头选型
镜头选型 ===================================================================================== 1.1.选择依据: 根据物体大小(视野),物距,精度确定相机CCD靶面尺寸;从而计算出焦距,放大率; 然后根据分辩率,对比度,景深,光圈,接口畸变允许范围等确定型号。 1.2.选择步骤:
机器视觉系统选型-镜头基础知识
广角镜头:焦距小于标准焦距50mm的。例如:16mm 景深大,聚焦距离更近 远距照像镜头:焦距大于标准焦距50mm的。例如:75mm 景深浅,放大远距离物体 变焦镜头:镜头焦距可调节,焦距有范围,例如:35-70mm 定焦镜头:镜头焦距不可调节。例如:25mm 远心镜头:没有透视形变 即普通镜头导致的近大远小现象 畸变类型:包括径向畸变和切向畸变 径向畸变:桶形畸变,枕形畸变 切向畸变:镜头不完全