行驶专题

汽车加油行驶问题全网最详细(动态规划+画图)
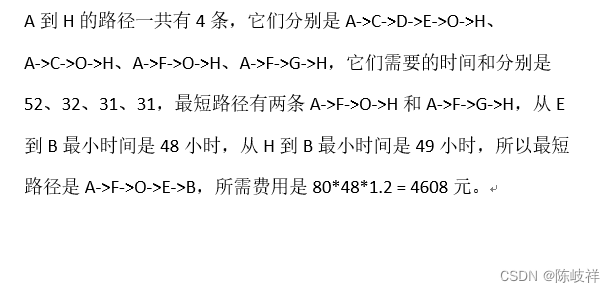
问题描述 给定一个N*N的网络,左上角记为起点S,坐标为(1,1),坐标轴方向及距离标识见图。一辆汽车从起点S出发驶向右下角终点(N,N)。在部分网格交叉点,设置了油库,可供汽车在行驶途中,为其加油。汽车在行驶途中需遵守如下规则: 1.汽车只能沿着网格边行驶,装满油后只能行驶K条网格边。出发时已装满油,起点和终点不设油库2.当汽车行驶经过一条网格边时,若其X坐标或Y坐标减小,则需付费B,否则免

【蓝桥杯集训100题】第29题scratch自动行驶 蓝桥杯scratch比赛专项预测编程题 集训模拟练习题
目录 scratch自动行驶 一、题目要求 编程实现 具体要求 二、案例分析 1、角色分析 2、背景分析 3、前期准备 三、解题思路 1、思路分析 2、详细过程 四、程序编写 五、考点分析 六、推荐资料 1、入门基础 2、蓝桥杯比赛 3、考级资料 4、视频课程 5、python资料 scratch自动行驶 蓝桥杯集训100题第29题内部训练模拟

番外篇 | YOLOv8算法解析和实战应用:车辆检测 + 车辆追踪 + 行驶速度计算
前言:Hello大家好,我是小哥谈。YOLOv8是ultralytics公司在2023年1月10号开源的,是YOLOv5的下一个重大更新版本,目前支持图像分类、物体检测和实例分割任务,在还没有开源时就收到了用户的广泛关注。它是一个SOTA模型,建立在以前YOLO版本的成功基础上,并引入了新的功能和改进,以进一步提升性能和灵活性。本文就对YOLOv8算法进行解析并以车辆检测及速度计算为案例进行
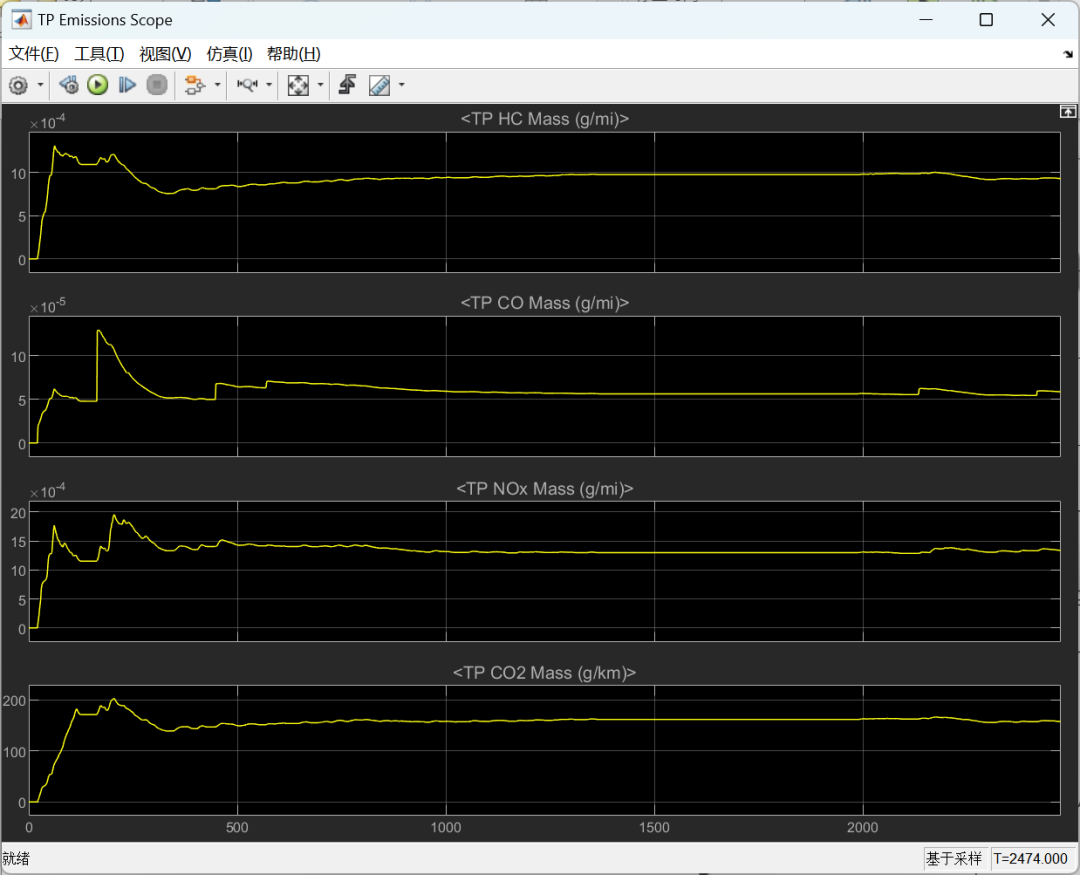
汽车油耗NEDC与WLTP有什么区别?以及MATLAB/Simulink的汽车行驶工况仿真
最近的热点新闻非比亚迪的秦L莫属,其油耗达到2.9L/100km,但其标注为NEDC也引起了讨论, NEDC与WLTP的区别 NEDC的全称为“New European Driving Cycle”,即“新欧洲驾驶循环”。这种油耗测试标准起源于上世纪80年代,主要是在实验室环境中进行,通过模拟市区和郊区驾驶循环而得出油耗数据。但是由于现实驾驶和模拟环境不同,现实驾驶环境更加复杂,所以NEDC测
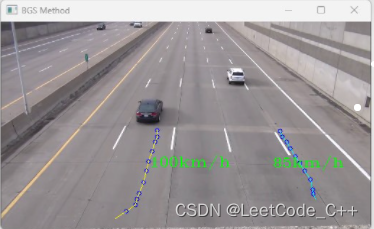
基于Python+OpenCV高速公路行驶车辆的速度检测系统
简介: 基于Python和OpenCV的高速公路行驶车辆的速度检测系统旨在实时监测高速公路上的车辆,并测量它们的速度。该系统可以用于交通监控、道路安全管理等领域,为相关部门提供重要的数据支持。 系统实现: 视频流输入:系统可以从摄像头实时获取视频流,也可以从预先录制的视频文件中读取数据。这个视频流是系统的主要输入源,用于检测和跟踪车辆。 车辆检测:利用OpenCV中的目标检测技术,系统能
汽车行驶中是怎么保障轴瓦安全的?
汽车轴瓦是一种用于减少摩擦和支撑转动部件的关键零部件,通常用于发动机的曲轴、凸轮轴等转动部件上。主要作用是减少转动部件之间的摩擦,支撑和保护曲轴、凸轮轴等旋转部件,确保它们在高速旋转时的稳定性和耐用性。 在汽车轴瓦加工过程中,人工检测员必须敏锐感知,并立即对产品质量作出判断,确保不会将瑕疵品送到消费者手中。然而,生产线速度越快,产品越复杂,缺陷越模糊,人工检测员很难满足生产效率需
力扣每日一题-总行驶距离-2024.4.25
力扣题目:总行驶距离 题目链接: 2739.总行驶距离 题目描述 代码思路 直接用数学模拟计算即可 代码纯享版 class Solution {public int distanceTraveled(int mainTank, int additionalTank) {int sum = 0;while(additionalTank > 0){if(mainTank >=

2024.4.25力扣每日一题——总行驶距离
2024.4.25 题目来源我的题解方法一 模拟 题目来源 力扣每日一题;题序:2739 我的题解 方法一 模拟 当mainTank还剩5升及以上的油,直接一次性减5升,距离加50,然后看additionalTank是否还有油,若有减1,然后mainTank加1;若mainTank小于5升油,则直接减完,距离加mainTank*10 时间复杂度:O(n) 空
LeetCode 2739. 总行驶距离
题目链接https://leetcode.cn/problems/total-distance-traveled/?envType=daily-question&envId=2024-04-25 简单题,看代码思考一下即可理解 class Solution {public int distanceTraveled(int mainTank, int additionalTank) {int

初学python记录:力扣2739. 总行驶距离
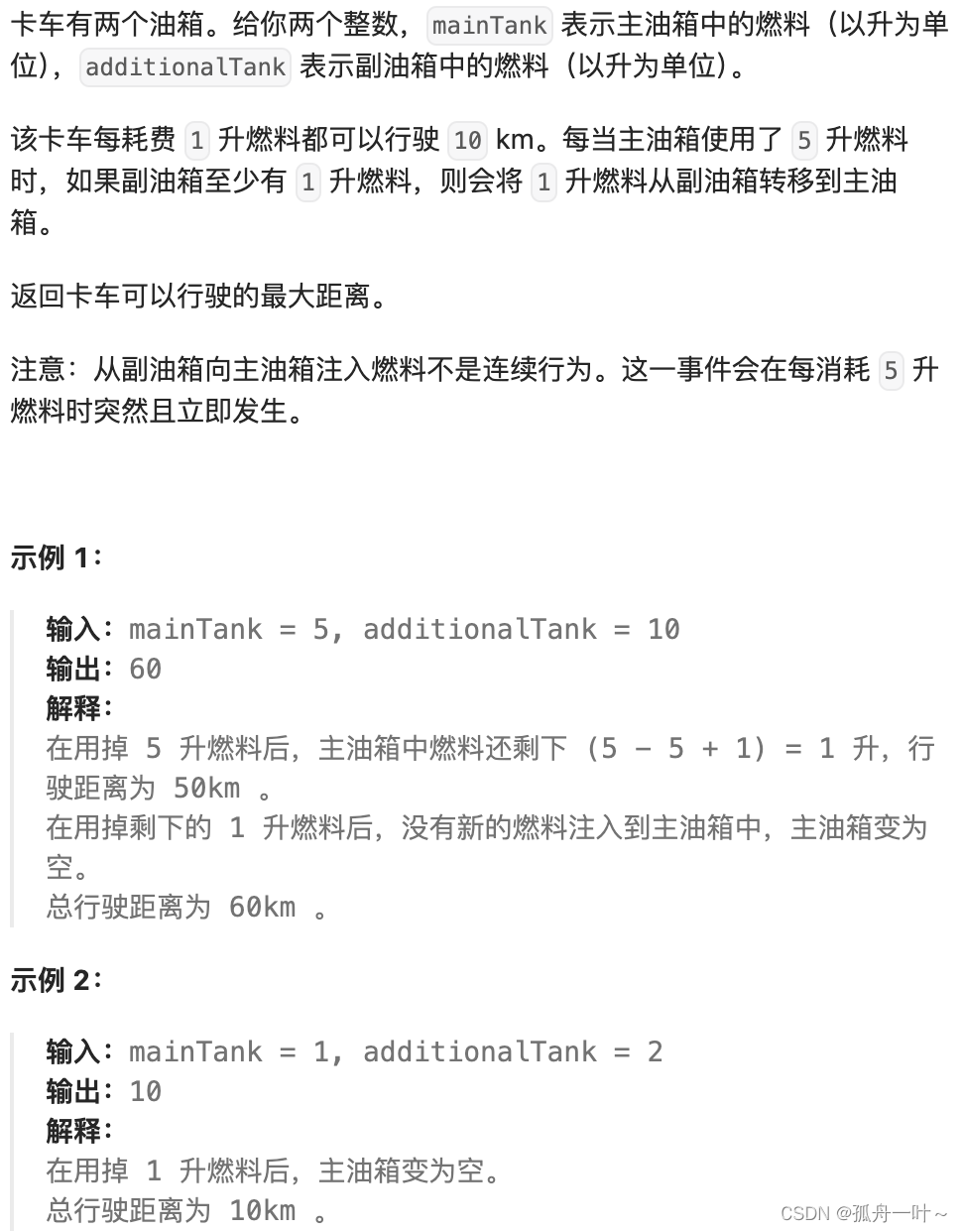
题目: 卡车有两个油箱。给你两个整数,mainTank 表示主油箱中的燃料(以升为单位),additionalTank 表示副油箱中的燃料(以升为单位)。 该卡车每耗费 1 升燃料都可以行驶 10 km。每当主油箱使用了 5 升燃料时,如果副油箱至少有 1 升燃料,则会将 1 升燃料从副油箱转移到主油箱。 返回卡车可以行驶的最大距离。 注意:从副油箱向主油箱注入燃料不是连续行为。这一事件会

LeetCode 2739.总行驶距离:不模拟直接算(很好算的)——相当于“满5返1”的活动
【LetMeFly】2739.总行驶距离:不模拟直接算(很好算的)——相当于“满5返1”的活动 力扣题目链接:https://leetcode.cn/problems/total-distance-traveled/ 卡车有两个油箱。给你两个整数,mainTank 表示主油箱中的燃料(以升为单位),additionalTank 表示副油箱中的燃料(以升为单位)。 该卡车每耗费 1 升燃料都可
【元胞自动机】基于matlab元胞自动机双车道交通流模型含靠右行驶【含Matlab源码 231期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

【车辆计数】基于matlab光流法行驶车辆检测计数【含Matlab源码 627期】
✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,Matlab项目合作可私信。 🍎个人主页:海神之光 🏆代码获取方式: 海神之光Matlab王者学习之路—代码获取方式 ⛳️座右铭:行百里者,半于九十。 更多Matlab仿真内容点击👇 Matlab图像处理(进阶版) 路径规划(Matlab) 神经网络预测与分类(Matlab) 优化求解(Matlab) 语音处理(Matlab

可行驶区域(freespace)如何标注
可行驶区域(freespace)如何标注 附赠自动驾驶学习资料和量产经验:链接 可行驶区域的检测主要是为自动驾驶提供路径规划辅助,可以实现整个的路面检测,也可以只提取出部分的道路信息,不同的环境,有很多不同的检测方法。 车辆的可行驶区域包括了结构化的路面、半结构化的路面、非结构化的路面。 结构化的路:结构层执行一定的标准,面层的颜色和材质统一,路面结构单一。 半结构化路面:一般的非标准化

科目二曲线行驶考试技巧
曲线行驶的操作技巧是什么?曲线行驶跟直角转弯是科目二考试中最简单的一项。虽然简单,小编还是不会放弃的,马上就给大家上最新的科目二曲线行驶考试技巧。 ● 曲线行驶扣分标准: 1、任一车轮压道路边缘线,不合格(原规定车轮挤压边线扣20分,过线不合格。新标准挤压边线也提高到不合格。) 需要注意的是行驶过程中车轮不能压线,下面是曲线行驶的步骤要点与技巧。 曲线行驶考试内容也较为简单,就是沿着指
超越软件:每天一亿公里可靠行驶的保障
一、行业发展:受监管要求以及企业业务需求,车联网市场越来越大 近年来,车联网被认为是物联网体系中最有产业潜力、市场需求最明确的领域之一。我国车联网产业已经进入快速发展阶段,产业活跃度越来越高,技术创新愈加活跃,新型应用蓬勃发展,产业规模不断扩大。我国在车联网服务、联网通信方面具有较好的产业基础,再结合云计算、大数据、人工智能的前沿科技的蓬勃发展,车联网行业市场越来越大。 根据咨询公司(中投顾
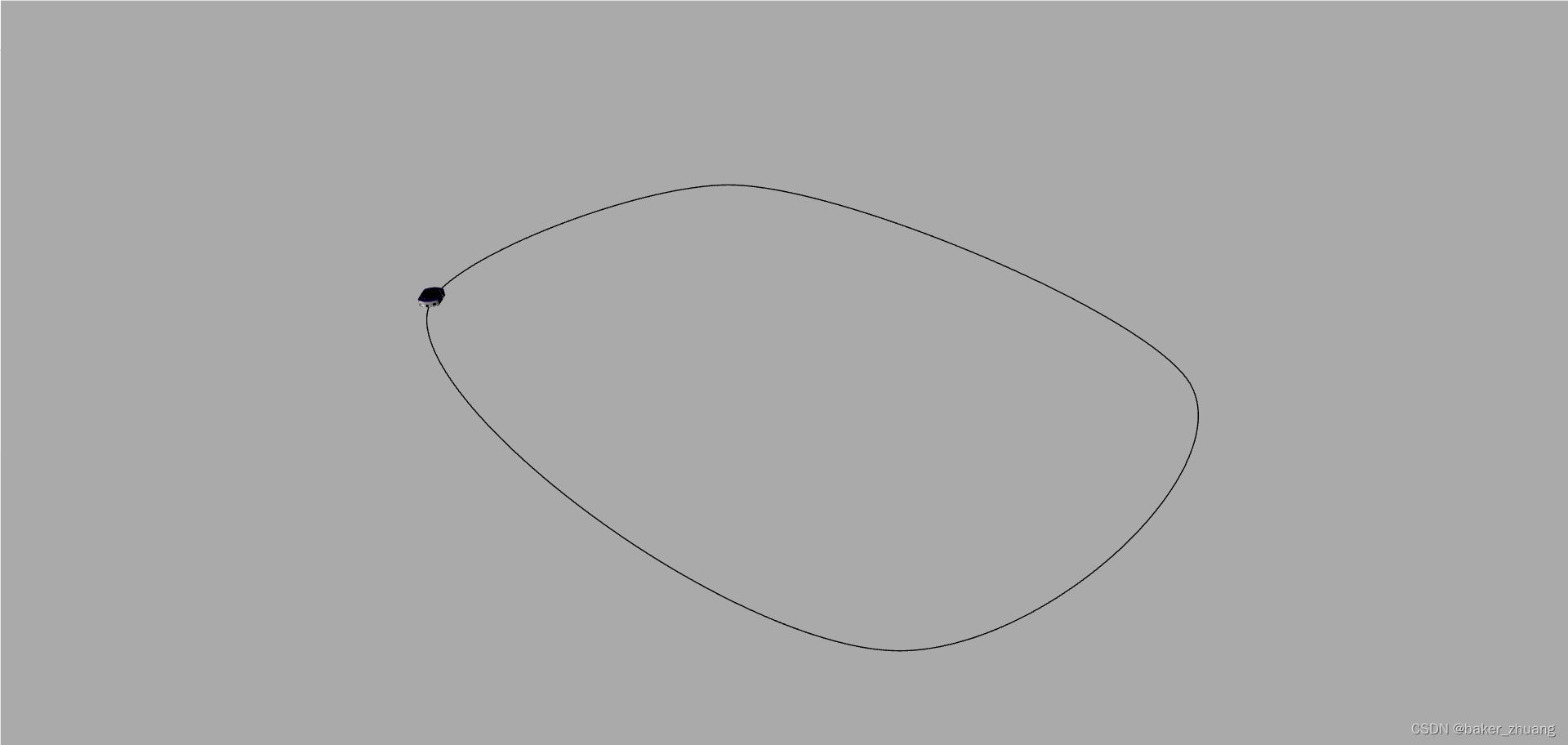
Threejs用切线实现模型沿着轨道行驶
这次讲一个经常遇到的使用场景,让模型沿着轨迹运动,这个场景需要解决两个问题,第一是让模型沿着轨迹运动,第二是在沿着轨迹运动的同时,要保持模型的头部也时刻保持前方,而不是单纯的只是更新模型位置。 还是先创建一个场景,添加相机,灯光,渲染器等,然后需要创建一个轨迹,这里用CatmullRomCurve3创建一个3维曲线,这个的好处是等会可以将此曲线拆解成多个同等份的点
4D毫米波雷达——ADCNet 原始雷达数据 目标检测与可行驶区域分割
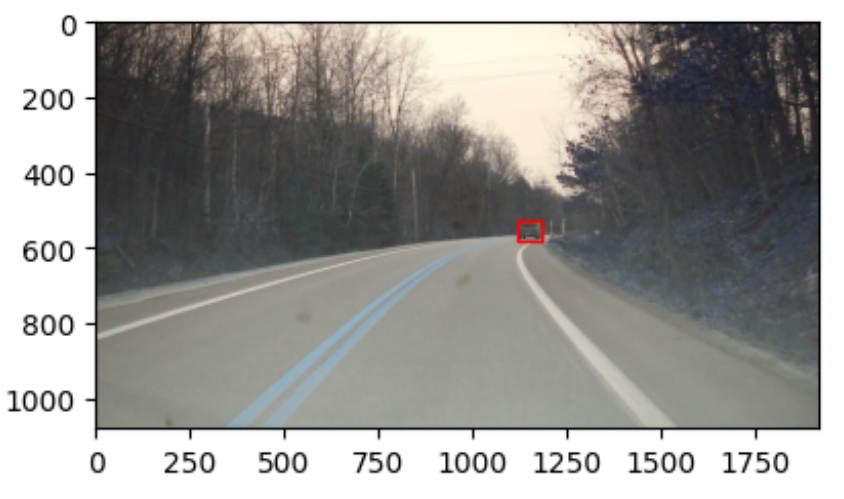
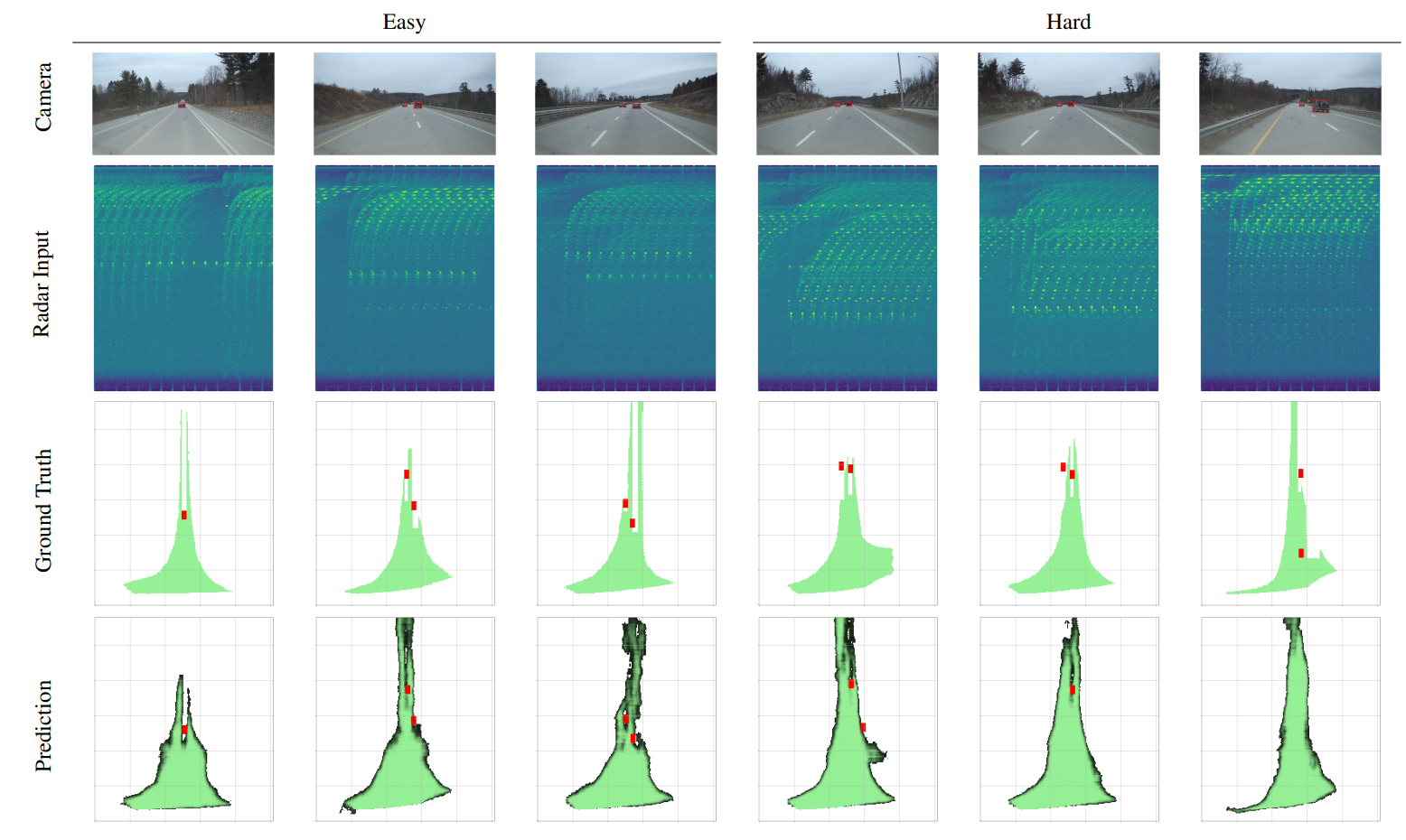
前言 本文介绍使用4D毫米波雷达,基于原始雷达数据,实现目标检测与可行驶区域分割,它是来自2023-12的论文。 会讲解论文整体思路、输入分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:ADCNet: Learning from Raw Radar Data via Distillation 1、模型框架 ADCNet只使用雷达信息,实现车辆检测和可行驶
4D毫米波雷达——FFT-RadNet 目标检测与可行驶区域分割 CVPR2022
前言 本文介绍使用4D毫米波雷达,实现目标检测与可行驶区域分割,它是来自CVPR2022的。 会讲解论文整体思路、输入数据分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:Raw High-Definition Radar for Multi-Task Learning 代码地址:https://github.com/valeoai/RADIal/tree/main

百度地图jsAPI实时画出运行轨迹,车头实时指向行驶方向,设置角度偏移
背景:公司想要做一个基于百度地图实时展示车的运行轨迹,且在运行过程中需要车头方向随着角度进行变化。 1.先把地图构建出来,然后造一组数据用以画线。 数据格式为: var PointArr = [ {long: 117.128937 ,lat: 36.676339 ,route: 30 }] 2.在地图上添加起始点图标,选用数组的第一个对象的经纬度进行定位展示。 addMar

基于WGS84 椭球恒向线距离计算沿纬度_经度路径行驶的距离附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。 🍎个人主页:Matlab科研工作室 🍊个人信条:格物致知。 更多Matlab仿真内容点击👇 智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统 信号处理 图像处理 路径规划
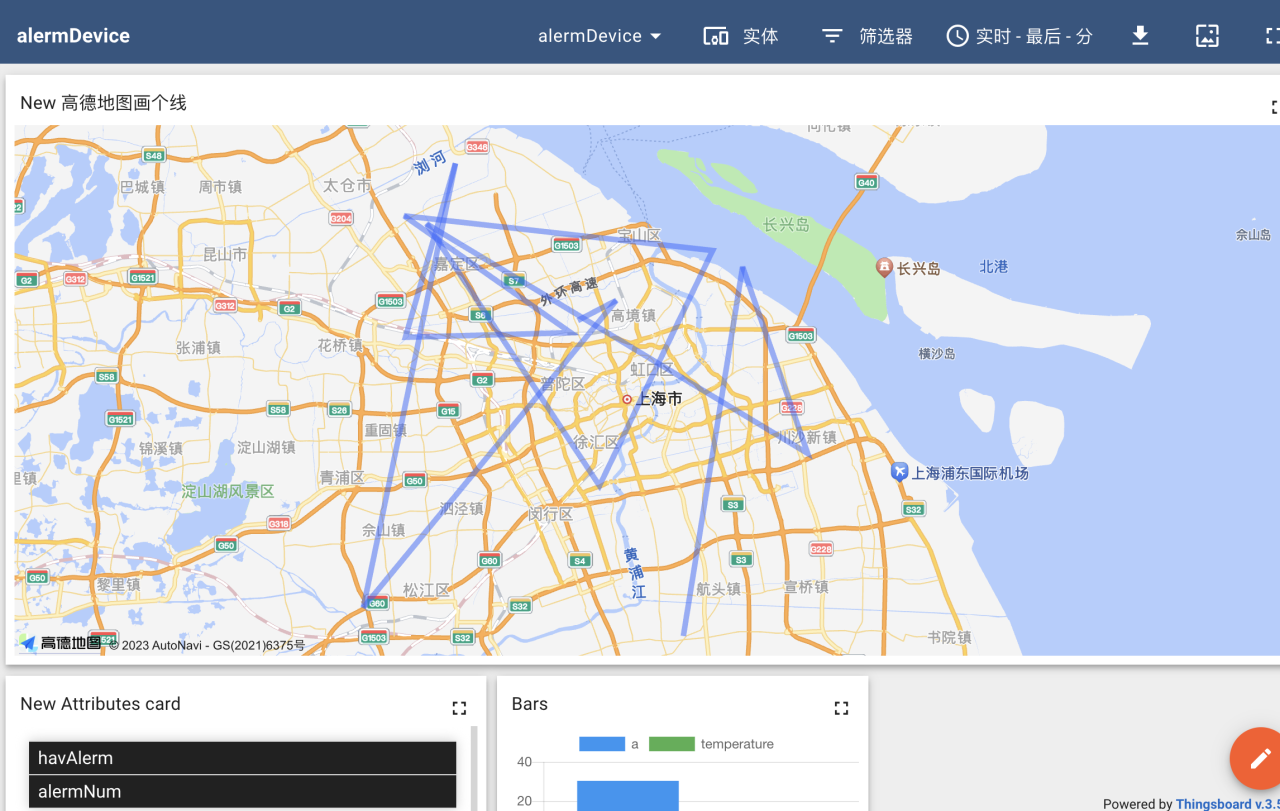
在ThingsBoard中实现 高德地图实时路线绘制,可实现车辆行驶状态监控
有读者询问如何在tb中实现 在高德地图中实时路线 类似这种图 组件要使用属性 数据格式为 { "LngLat": "118.39,37.92" } 伟大的作者,直接无私到将最终作品导出,只需要导入系统,修改配置参数就可以使用。 啊,知识渊博,无私奉献的作者,值得读者的赞美。 本来想 做成付费资源的,懒得搞了。直接发出来吧。 想要就直接导入即可。 {"alias": "_"

深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图
大家好,我是微学AI,今天给大家介绍一下深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图。本文我将介绍自动驾驶技术及其应用场景,并重点阐述了基于计算机视觉技术下的自动驾驶。自动驾驶技术是一种利用人工智能和计算机科学实现无人驾驶的技术,通过感知技术、定位技术、规划技术和控制技术等多个方面的技术来实现汽车的运动控制和路线规划。其中,计算机视
深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图
大家好,我是微学AI,今天给大家介绍一下深度学习实战66-基于计算机视觉的自动驾驶技术,利用YOLOP模型实现车辆区域检测框、可行驶区域和车道线分割图。本文我将介绍自动驾驶技术及其应用场景,并重点阐述了基于计算机视觉技术下的自动驾驶。自动驾驶技术是一种利用人工智能和计算机科学实现无人驾驶的技术,通过感知技术、定位技术、规划技术和控制技术等多个方面的技术来实现汽车的运动控制和路线规划。其中,计算机视

独立行驶2400英里,Embark的无人车创新纪录
本文由人工智能观察编译 译者:Sandy 总部位于旧金山的Embark成立于2016年,现已筹集了1720万美元的风险资金,其投资者包括Data Collective,Maven Ventures,AME Cloud Ventures和Y Combinator。本周二,该公司宣布,其自动驾驶半卡车完成了从洛杉矶到佛罗里达州杰克逊维尔的海岸的旅程,行驶总长约为2400英里。 在此之前,Emba