舵机专题

物联网之ESP32控制舵机、通过网页设置舵机角度、Web服务、舵机原理、接线、Arduino、WiFi、Http
MENU 前言原理硬件电路设计软件程序设计LEDC输出PWM信号使用第三方库控制舵机网页控制舵机 前言 舵机在电子产品中非常常见,比如四足机器人、固定翼航模等都有应用,因此学习舵机对电子制作非常有意义。本文章使用Arguino的PWM对SG90舵机旋转角度控制。 原理 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。舵机只


舵机是什么?舵机内部结构解析
什么是舵机呢?首先,“舵机”这个名号其实是一个俗称,是那些玩航模、船模的人起的名字,因为这种电机常被用于舵面控制。舵机其实就是一个简单的伺服电机系统,也是最常见的伺服电机系统。 舵机是一种位置(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统,由外壳(上,中,下壳)、控制电路、电机、齿轮组、位置传感器以及轴承组成。舵机是一个闭环控制系统。控制电路板接收来自信号线的控制信号,控制电机
舵机堵转的危害与简单解决方式
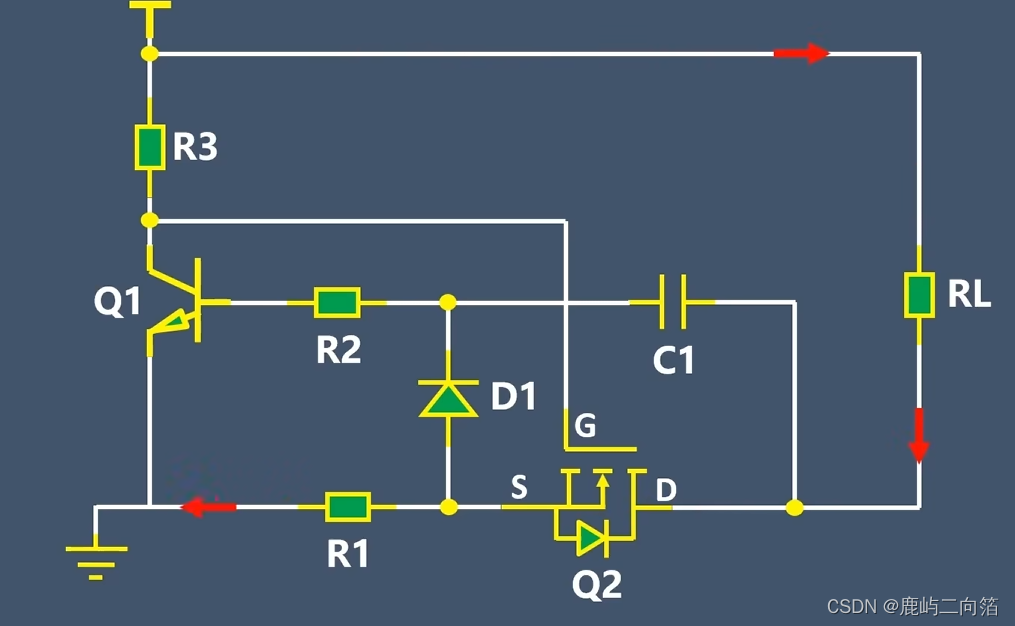
舵机的堵转保护是一种安全特性,用于防止舵机在遇到阻力无法正常旋转时受到损害。当舵机尝试移动到某个位置但因为外部阻力(如卡住或碰撞)而无法完成动作时,它会持续施加力直至达到其最大扭矩。如果没有堵转保护,这种情况可能会导致舵机内部的电机过热,甚至烧毁。 堵转保护通过监测电流消耗来实现。在正常操作下,舵机的电流消耗相对稳定。但是,在堵转情况下,电流会急剧增加,因为电机需要更多的电力来克服阻力。堵转保护
用HAL库改写江科大的stm32入门-6-4 PWM驱动舵机
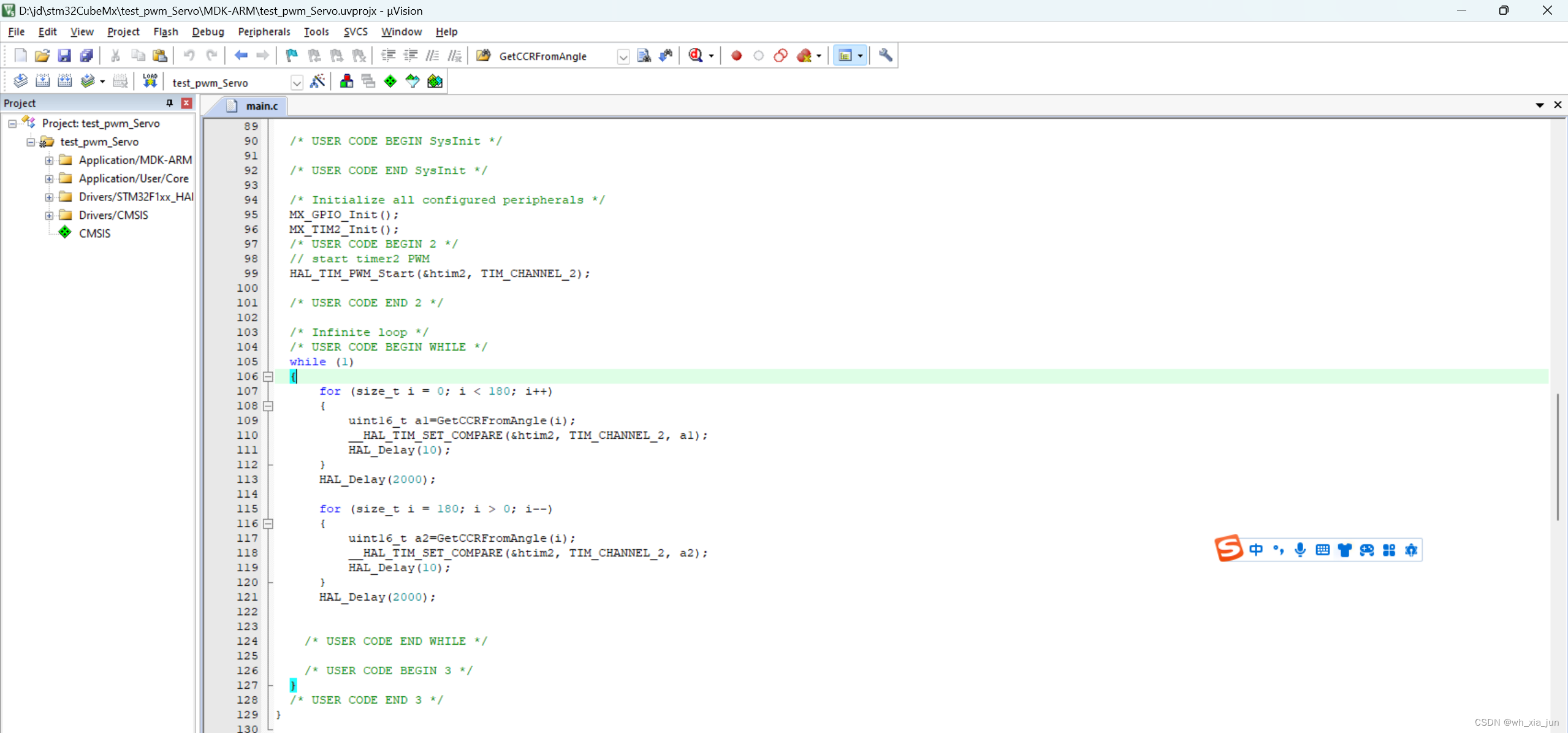
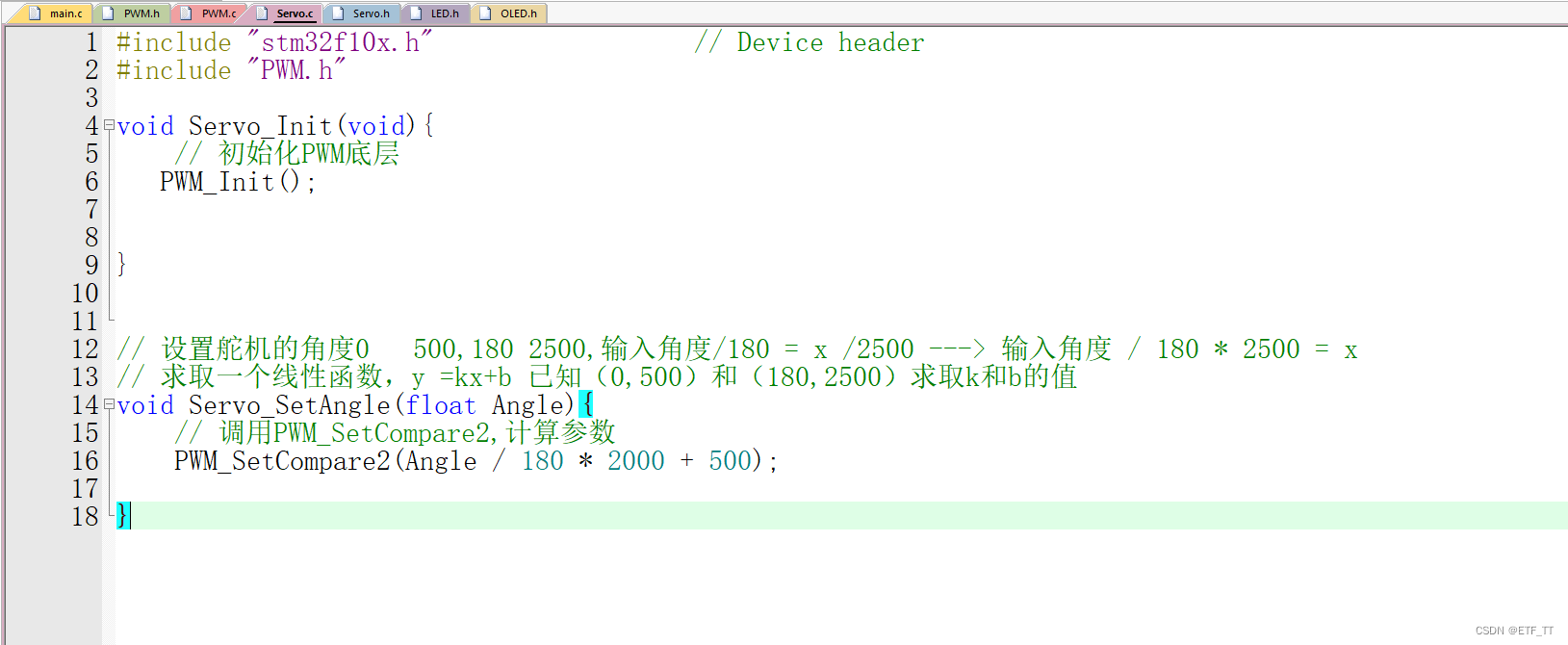
接线图: 如何控制一个舵机 舵机的控制由一个脉冲宽度调制信号(PWM波)来实现,该信号在这个实验里使用stm32来发出。 舵机通讯协议: 对应设置参数: ARR的值为19999 CCR的值为500~2500(生成占空比是2.5%~12.5%的波形) PSC为71 打开TIM2的通道2 设置定时器相关参数 分频系数PSC:72-1 自动重
Arduino_ESP32_控制舵机运行【2024年】版
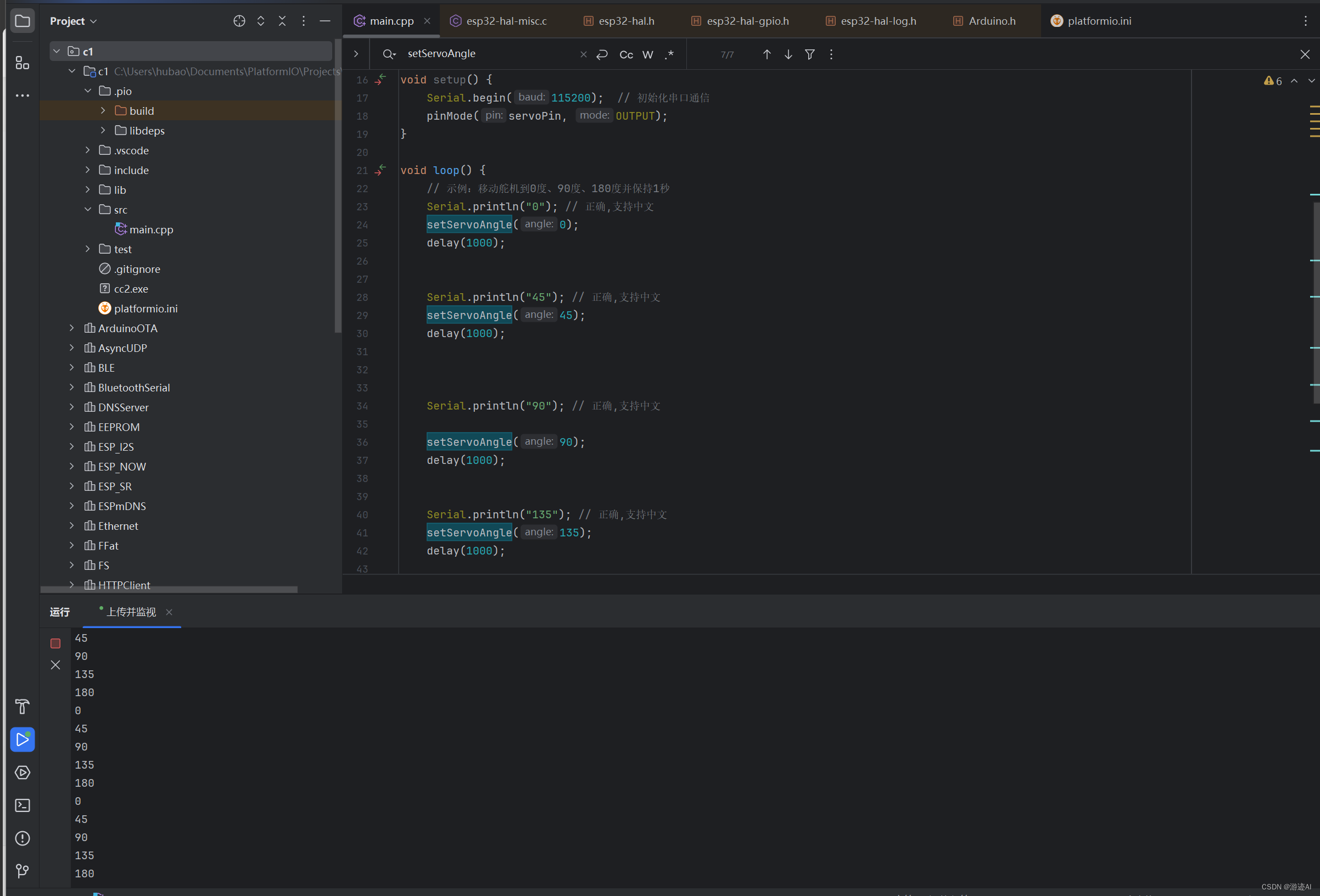
介绍 吧下面代码复制进去就可以使用了。 当然肯定不只是esp32基本上所有的Arduino都可以使用 然后接线的话信号线接到18号io口 然后其他的接电源正负极 图示 代码教程 #include <Arduino.h>// 定义舵机控制引脚const int servoPin = 18;// 定义舵机角度对应的脉宽范围const int minPulseWidth =

杂项——32舵机控制
180度舵机内部有一个基准电路,产生周期为20ms,高电平宽度为1.5ms的基准信号,这个位置其实是舵机转角的中间位置。通过比较信号线的PWM信号与基准信号,内部的电机控制板得出一个电压差值,将这个差值加到电机上控制舵机转动。控制舵机的高电平范围为0.5ms到2.5ms。0.5ms为最小角度,2.5ms为最大角度。 以180度舵机为例: 0.5ms----------------0度;
![[STM32+HAL]LD-1501MG舵机二次开发指南](https://img-blog.csdnimg.cn/direct/531e455b98064619acef56090b2aa64a.png)
[STM32+HAL]LD-1501MG舵机二次开发指南
一、准备材料 核心板:STM32F407ZGT6 舵机:LD-1501MG数字舵机 控制器:24路PWM舵机控制器 二、HAL库配置 开启串口与控制器通信 三、Keil填写代码 1、Servo.c #include "Servo.h"#include "usart.h"uint8_t Message[10]={0x55,0x55,0x08,0x03,0x01,

舵机(结构,原理,控制方法)
介绍 舵机,全称为伺服马达(Servo Motor),是一种能够精确控制角度或位置的电动机。它广泛应用于模型制作、机器人技术、工业自动化等领域。舵机通过接收控制信号,将其转化为机械运动,从而实现精确的控制。 舵机主要由以下几个部分组成 电机:舵机的核心部分,用于提供动力。减速齿轮组:将电机的快速旋转转化为较大力矩的慢速旋转。位置反馈装置:通常是一个电位计(电位器),用于检测输出轴的位置,将其

Go实现树莓派控制舵机
公式说明 毫秒(ms)是时间的单位,赫兹(Hz)是频率的单位,而DutyMax通常是一个PWM(脉冲宽度调制)信号中表示最大占空比的值。以下是它们之间的关系和一些相关公式: 频率(Hz)和周期(T): 频率是每秒周期性事件发生的次数。周期是频率的倒数,表示一个完整周期所需的时间。 f=1/T, T=1/f 其中: ( f ) 是频率,单位是赫兹(Hz)。( T ) 是周期,单位是秒(s)。
【stm-4】PWM驱动LED呼吸灯 PWM驱动舵机PWM驱动直流电机
1.PWM驱动LED呼吸灯 void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct); //结构体初始化输出比较单元 void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct); void TIM_OC3I
STM32使用PWM控制舵机
系列文章目录 STM32单片机系列专栏 C语言术语和结构总结专栏 文章目录 1. 舵机简介 2. 硬件连接 3. 代码实现 3.1 PWM.c 3.2 PWM.h 3.3 Servo.c 3.4 Servo.h 3.5 main.c 3.6 完整工程文件 PWM和OC输出详解: STM32定时器的OC比较和PWM 1. 舵机简介 舵机是一种


2.SG90舵机模块
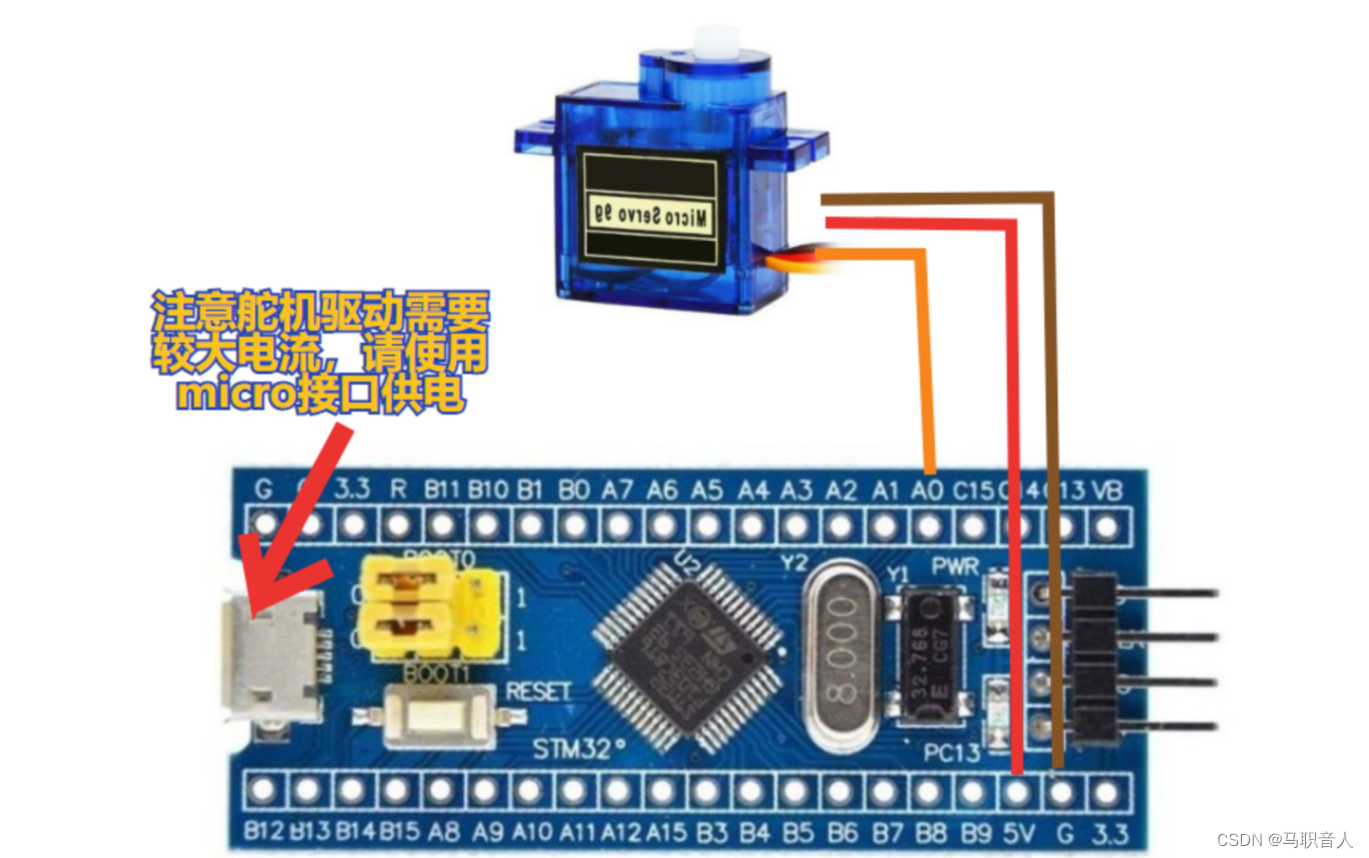
当我们输出一段脉冲信号的时候就可以调节舵机的角度 我们可以从原理图可以看到舵机的脚在PA6 从芯片手册我们又可以看到PA6对应TIM3_CH1,并且不用开启部分重映像就能使用 新建Servo.c存放PWM初始化 配置PWM void Servo_TIM3_Init(u16 arr,u16 psc){//开启TIM3的时钟RCC_APB1PeriphClockCmd(RC

51单片机学习笔记17 4线双极性马达和SG90舵机
51单片机学习笔记17 4线双极性马达和SG90舵机 一、四线双极性电机控制1. 四线双极性电机工作方式介绍(1)工作原理(2)驱动方式(3)极性区分(4)驱动方式 2. TC1508S芯片介绍(1)主要特性(2)引脚(3)输入/输出逻辑表 3. 模块电路图4. 代码实现dc_motor_4_wire_utils.cmain.c 二、SG90舵机控制1. SG90简介2. 硬件连接3. 控

数字和模拟舵机的区别与应用
数字舵机与模拟舵机有的区别: 1、在处理输入信号的方式不同:数字舵机是由主要由马达、减速齿轮、控制电路等组成,只需要发送一次PWM信号就能保持在规定的某个位置。 而模拟舵机是相同于传统的舵机,是需要多次发送PWM信号才能够保持在规定的位置上,实现对舵机的控制,按照规定的要求进行的速度进行转动。 2、在控制电路上不同:数字舵机的控制电路比模拟舵机多了微处理器和晶振;因此两者在控制电路的处理方式
可能是性价比最高的,0-180度乐高舵机解决方案
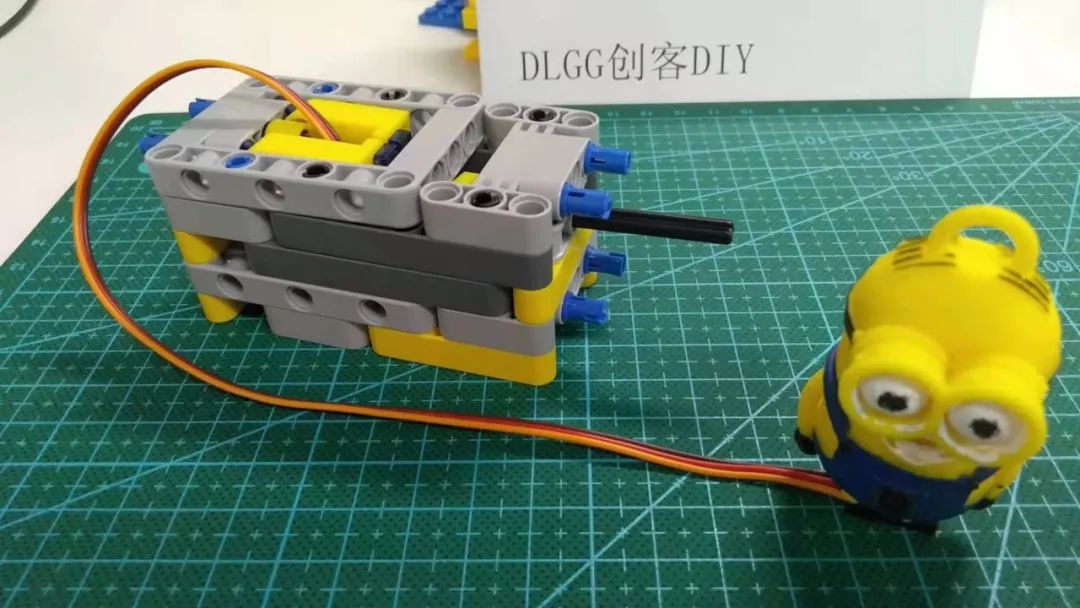
如图所示(左边那个), 最便宜的sg90舵机,还没系统测试转弯扭矩够不够,不够就换金属齿轮的那个。 右边的小黄人是我的新logo, 线有点乱就踩在脚底下了,没别的意思,非要有点意思可以理解是问题解决后成功的喜悦,把问题踩在脚下的“赶脚”(感觉)。 完了
STM32系列——F103C8T6 控制SG90舵机(HAL库)
文章目录 一、舵机控制原理二、.CubeMX配置配置RCC、SYS、时钟树配置RCC配置SYS配置时钟树配置定时器产生PWM波形 Keil5代码接线图及效果如果您发现文章有错误请与我留言,感谢 一、舵机控制原理 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms以180度角度伺服为例,那么对应

基于mini stm32 PS2遥控控制舵机,LCD屏显示
引言 这是为了研究微型四旋翼无人机做的一个小测试,测试摇杆和舵机的性能,为后续控制空心杯电机做准备 实验器材 miniSTM32板,servo 9g 舵机,PS2摇杆,LCD显示屏 实物接线 ps2 stm32 舵机 stm32 GND GND
32单片机基础:PWM驱动舵机,直流电机
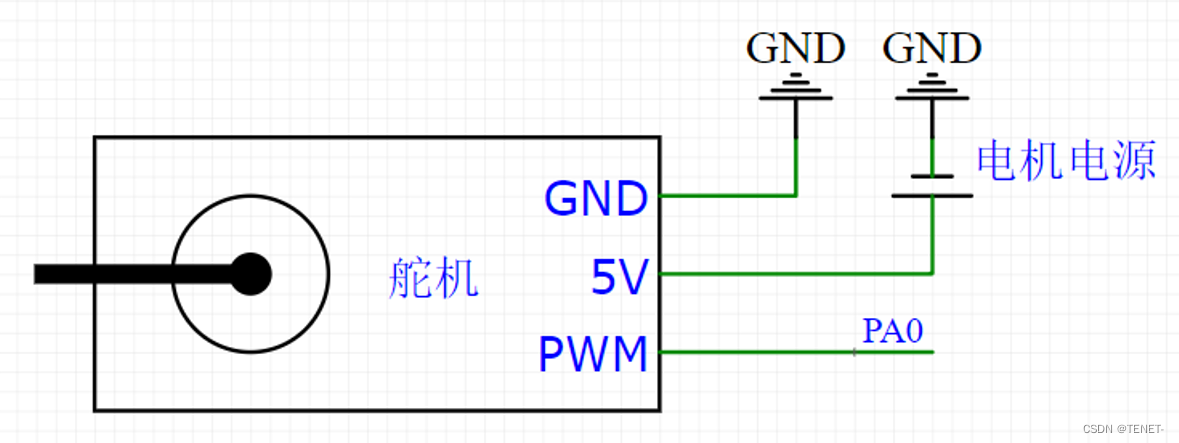
PWM驱动舵机 接线图如上图所示。注意,舵机的5V 线不能接到面包板上的正极,面包板上的正极只有3.3V,是STM32提供的,所以要接到STLINK的5V, 我们如何驱动舵机呢?由之前我们介绍原理知道,要输出如下图对应的PWM波形才行,只要你的波形能按照这个规定,准确的输出,就能驱动 在上次PWM驱动呼吸灯的基础上改一下,我们现在电路图连接的是PA1口的通道2,这里GPIO的初始化
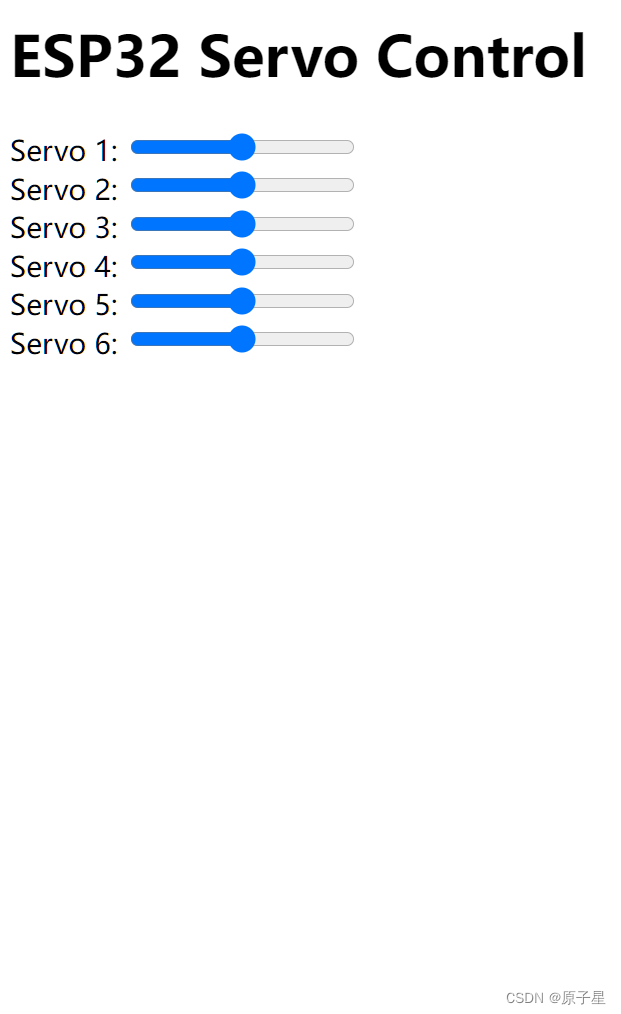
用ESP32和MicroPython实现6自由度遥控舵机机械臂
文章目录 说明MicroPython代码:main.py服务端的页面文件 index.htm使用 说明 ESP32提供了多路IO接口和WiFi联网能力,很多开发板也支持MicroPython,可以方便的实现一个简单的舵机机械臂控制,废话不多说,直接上代码吧: MicroPython代码:main.py 使用到了microdot库,用于控制页面文件的加载和返回 from m

BlueROV加舵机控制以及走过的弯路
BlueROV加舵机控制以及走过的弯路 因实验需求,需要在BlueROV上加上一个一自由度的机械臂,由一个水下舵机控制,水下舵机需要通过PWM控制,PWM输出由手柄控制。 思路也很简单:手柄——pixhawk——舵机 就是弯路走了好久。。。。。 一、手柄资源不足? BlueROV在下水实验后发现,现有的按键基本都已经使用。只有上面还有两个按键没有使用,并且不具有保持功能 后面发现,手柄上有一
STM32自学☞PWM驱动舵机(按键控制)
PWM.c文件 #include "stm32f10x.h" /*初始化函数*/ void PWM_Init(void){ /*开启时钟*/ RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GP

stm32学习记录——舵机与超声波测距的感应垃圾桶(附工程码)
首先是超声波测距的代码,原理就是定时器产生PWM波控制舵机旋转到指定角度。 void HC_SR04Gpio1Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitStructure

【STM32F103】PWM驱动舵机(SG90MG995)
PWM 关于如何发出PWM可以参考我之前的文章。 【STM32F103】TIM定时器&PWM-CSDN博客 SG90&MG995 以这两款舵机为例是因为我手上碰巧只有这两款舵机。不过实际上舵机的操作基本上差不了多少,基本上都是给频率为50Hz的PWM,然后就可以让舵机旋转不同角度。 下面是我截取自某宝卖家给的说明书的关于舵机的介绍 1. 什么是舵机: 在机器人机电