本文主要是介绍PWM驱动舵机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
PWM驱动舵机
接线图

程序结构图:
pwm.c部分代码
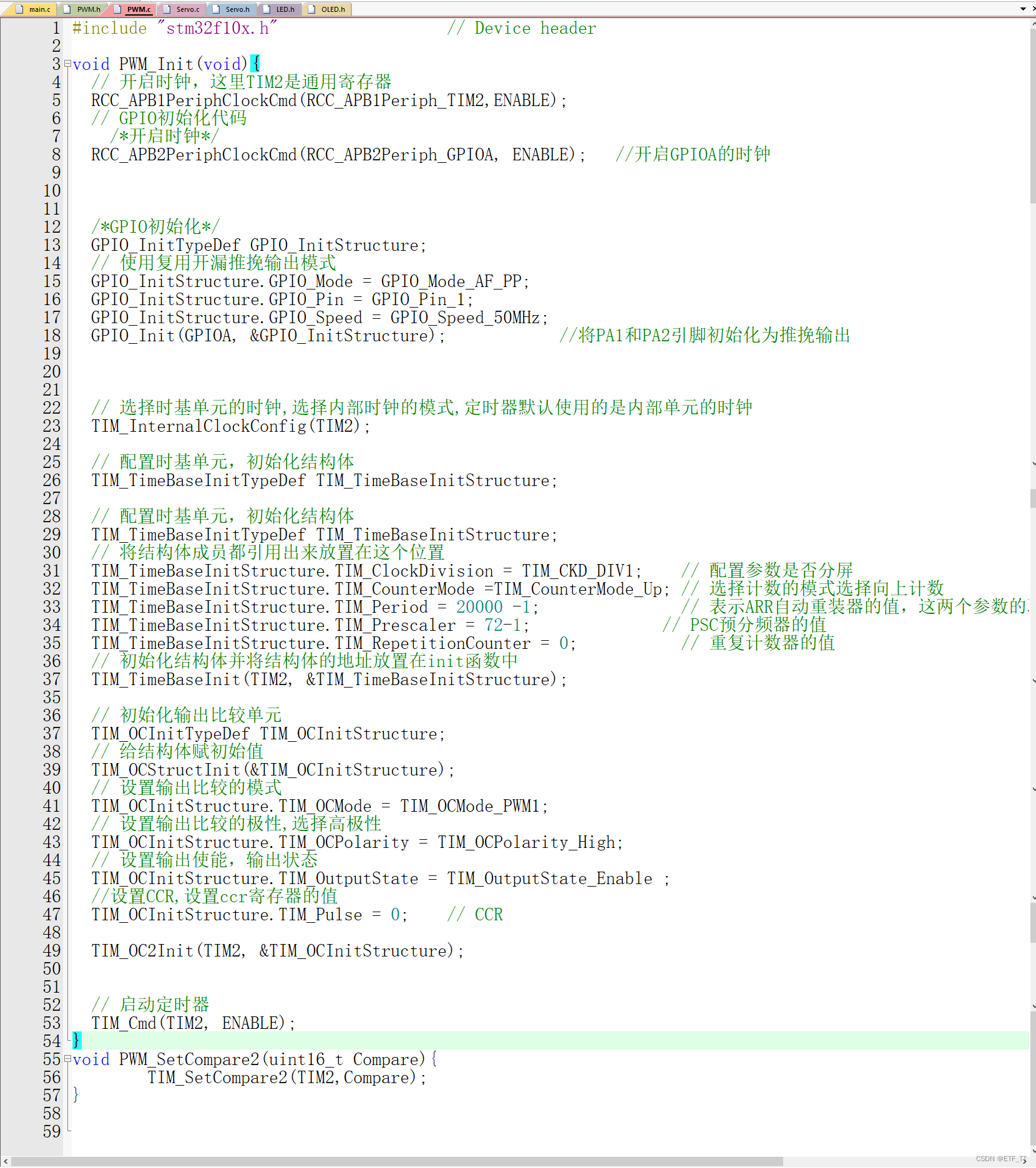
#include "stm32f10x.h" // Device headervoid PWM_Init(void){// 开启时钟,这里TIM2是通用寄存器RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);// GPIO初始化代码/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;// 使用复用开漏推挽输出模式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出// 选择时基单元的时钟,选择内部时钟的模式,定时器默认使用的是内部单元的时钟TIM_InternalClockConfig(TIM2);// 配置时基单元,初始化结构体TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;// 将结构体成员都引用出来放置在这个位置TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 配置参数是否分屏TIM_TimeBaseInitStructure.TIM_CounterMode =TIM_CounterMode_Up; // 选择计数的模式选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000 -1; // 表示ARR自动重装器的值,这两个参数的取值都要在0-65535之间TIM_TimeBaseInitStructure.TIM_Prescaler = 72-1; // PSC预分频器的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; // 重复计数器的值// 初始化结构体并将结构体的地址放置在init函数中TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);// 初始化输出比较单元TIM_OCInitTypeDef TIM_OCInitStructure;// 给结构体赋初始值TIM_OCStructInit(&TIM_OCInitStructure);// 设置输出比较的模式TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;// 设置输出比较的极性,选择高极性TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// 设置输出使能,输出状态TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable ;//设置CCR,设置ccr寄存器的值TIM_OCInitStructure.TIM_Pulse = 0; // CCRTIM_OC2Init(TIM2, &TIM_OCInitStructure);// 启动定时器TIM_Cmd(TIM2, ENABLE);
}
void PWM_SetCompare2(uint16_t Compare){TIM_SetCompare2(TIM2,Compare);
}
PWM.H文件
#ifndef __PWM_H_
#define __PWM_H_
void PWM_Init(void);
void PWM_SetCompare2(uint16_t Compare);
#endif电机驱动文件Servo.c文件
#include "stm32f10x.h" // Device header
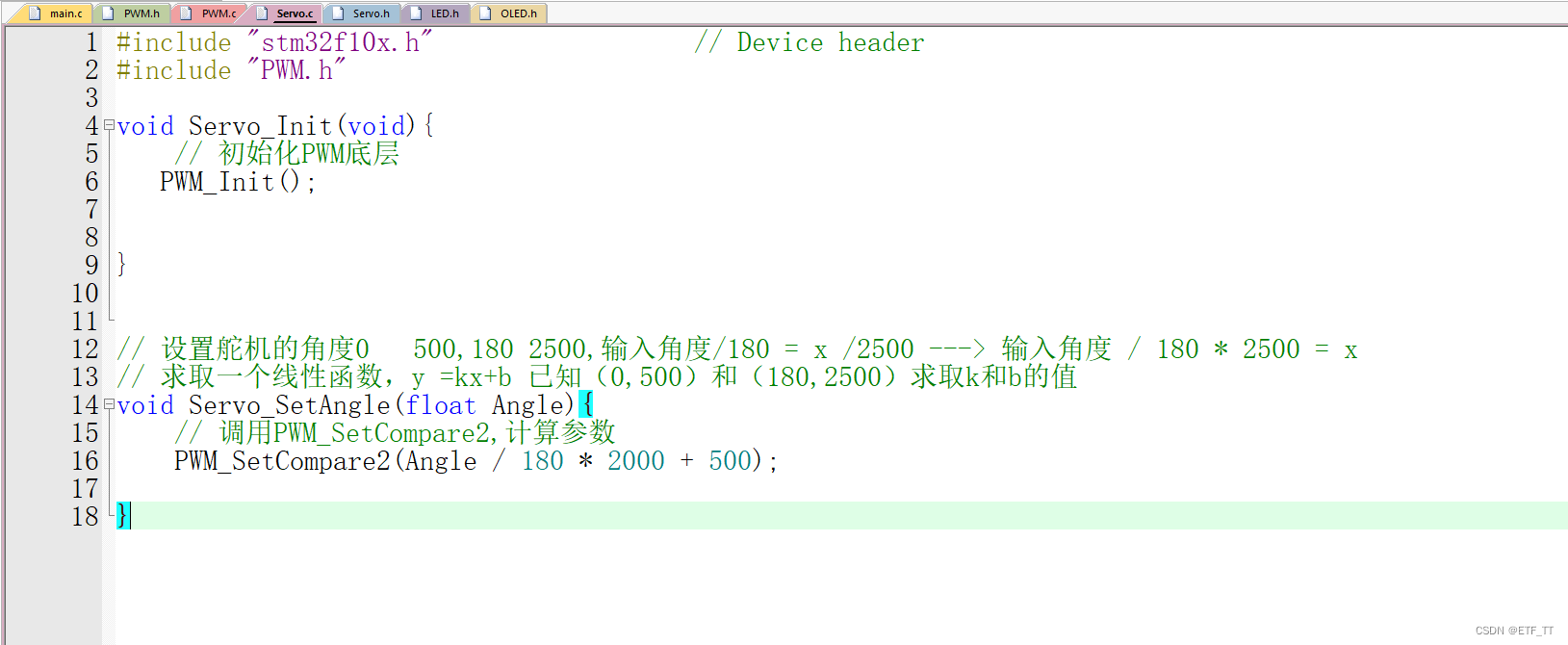
#include "PWM.h"void Servo_Init(void){// 初始化PWM底层PWM_Init();}// 设置舵机的角度0 500,180 2500,输入角度/180 = x /2500 ---> 输入角度 / 180 * 2500 = x
// 求取一个线性函数,y =kx+b 已知(0,500)和(180,2500)求取k和b的值
void Servo_SetAngle(float Angle){// 调用PWM_SetCompare2,计算参数PWM_SetCompare2(Angle / 180 * 2000 + 500);}
servo.h文件
#ifndef __SERVO_H_
#define __SERVO_H_
void Servo_Init(void);
void Servo_SetAngle(float Angle);
#endifmain函数文件
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Servo.h"
#include "KEY.H"
uint8_t i;
// 按键键码
uint8_t KeyNum;
float Angle;int main(void)
{// 初始化oledOLED_Init();Servo_Init();// 初始化按键Key_Init();// OLED显示角度的值OLED_ShowString(1,1,"Angle:");while (1){KeyNum = Key_GetNum();if(KeyNum == 1){Angle += 30;if(Angle > 180){Angle = 0;}}Servo_SetAngle(Angle);OLED_ShowNum(1, 7, Angle, 3);}
}这篇关于PWM驱动舵机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!