pwm专题

STM32CubeMX 3 解锁PWM模块
今天在底层高手的指导下又学习了PWM模块的配置!汪! 首先打开上次配置好的文件,如下: 然后,我们要用TIM1来进行PWM 的设置: 然后,clock configuration 不用动 然后 双击自动弹出以下,窗口:

STM32F103调试DMA+PWM 实现占空比逐渐增加的软启效果
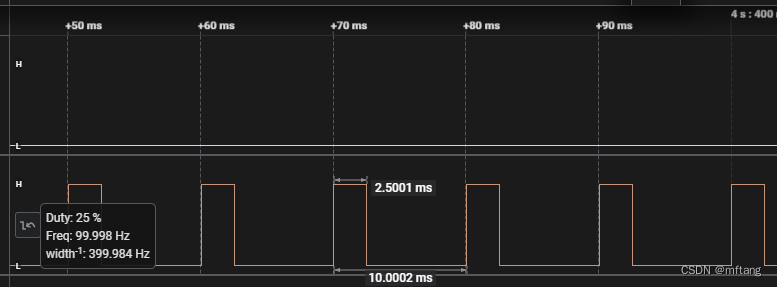
实现效果:DMA+PWM 实现PWM输出时,从低电平到输出占空比逐渐增加再到保持高电平的效果,达到控制 MOS 功率开关软启的效果。 1.配置时钟 2.TIM 的 PWM 功能配置 选择、配置 TIM 注意:选择 TIM 支持 DMA 控制输出 PWM 功能的通道,有的TIM通道支持PWM 但不支持PWM注意选择。 PWM参数设置 Counter Period :

s3c2440---PWM使用之蜂鸣器驱动移植
一、蜂鸣器驱动介绍 1.1.什么是蜂鸣器 蜂鸣器是一种简单的声响发生器,常用于电子产品中作为警示或提醒作用。其基本原理是通过交替改变直流电的电压方向来产生声音,一般使用交替电流产生声音会比较稳定。 1.2.蜂鸣器的类别 1.有源蜂鸣器 1)结构原理 有源蜂鸣器内部自带振荡源,只需接通电源即可发声。内部电路会自动产生一定频率的振荡信号,从而驱动蜂鸣器发声。

51单片机的pwm控制的智能台灯设计【proteus仿真+程序+报告+原理图+演示视频】
1、主要功能 该系统由AT89C51/STC89C52单片机+LCD1602显示模块+DS1302时间模块+光敏传感器模块+人体红外模块+按键等模块构成。适用于智能台灯、PWM调节灯光亮度等相似项目。 可实现基本功能: 1、LCD1602实时显示北京时间、环境光照强度、手动/自动模式、台灯亮度等信息; 2、DS1302采集时间数据; 3、光敏传感器(电位器模拟)采集光照强度; 4、人

笔记 11 : 彭老师课本第 6 章, PWM :原理,datasheet 查阅,相关寄存器说明,上拉电阻,下拉电阻概念
(81) 介绍 PWM : ++ ++ ++ ++本板子上远见,就是一个无源的蜂鸣器: (82) 接着开始查看说明书: ++ ++ (83)介绍 PWM 的工作原理: ++ ++ ++ 每个 PWM 周期结束后都可以重新设置 TCMPBn 与 TCNTBn 寄存器,从而实现更复杂的波形 ,见 sheet 手册。 (84) 接着开

关于应广11Bit_PWM的一点理解
应广单片机有两种PWM控制器,一种是8bit,另外一种是11bit。8bit的pwm输出,用起来很简单的,也很好理解。就是 CLK/2^8,得到pwm的输出频率,然后配置 占空比寄存器 tm3b=(0-255)就可以输出对应的占空比。 但是11bit的pwm就没有那么好理解了 先看手册上的公式 为什么10bit的分频却可以实现11bitpwm呢?

GD - GD32350R_EVAL - PWM实验和验证1
文章目录 GD - GD32350R_EVAL - PWM实验和验证1概述笔记实验设计实验环境GD32350R_EVAL 的硬件连接修改程序配置 - 只产生PWM波,不要CMP清除波形TIMER0时钟设置TIMER0的PWM设置参数设置main()中PWM波形的开启代码示波器测量结果如果要产生4KHZ的PWM需要设置怎样的参数?尝试1 - 算一下时钟设置参数尝试1 - 产生代码,编译,验证错

《嵌入式-STM32开发指南》第二部分 基础篇 - 第5章 PWM
5.1 PWM_输出 5.1.1 PWM输出的工作原理 脉冲宽度调制(PWM),是英文“ Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。简单一点,就是对脉冲宽度的控制。 STM32 的定时器除了 TIM6 和 7。其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时

《嵌入式-STM32开发指南》第二部分 基础篇 - 第5章 PWM(HAL库)
标准库3.5实现: 《嵌入式-STM32开发指南》第二部分 基础篇 - 第5章 PWM 5.1 PWM_输出 5.1.1 PWM输出的工作原理 脉冲宽度调制(PWM),是英文“ Pulse Width Modulation” 的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。 简单一点,就是对脉冲宽度的控制。 STM32 的定时器除了 TIM6 和 7
STM32的TIM1之PWM互补输出、死区时间和刹车配置
在STM32微控制器中,定时器TIM1可以配置为产生PWM信号,并且支持互补输出、死区时间和刹车功能。这些功能在电机控制等应用中非常有用。本文将介绍如何配置TIM1来实现这些功能。 1. PWM互补输出 互补输出是指两个PWM信号相位相反,这样可以减少电机驱动器中的电流波动,提高效率。在STM32中,可以通过配置BRR寄存器(Break Register)来实现互补输出。 2. 死区时间配置
[dsp2835]产生PWM
#include "F2806x_Device.h" // 包含设备特定的定义和宏#include "F2806x_EPwm.h" // 包含 ePWM 模块的寄存器定义void InitEPwm1() {// 初始化时间基准EPwm1Regs.TBCTL.bit.CTRMODE = 0; // 启用向上计数模式EPwm1Regs.TBPRD = 1000; //
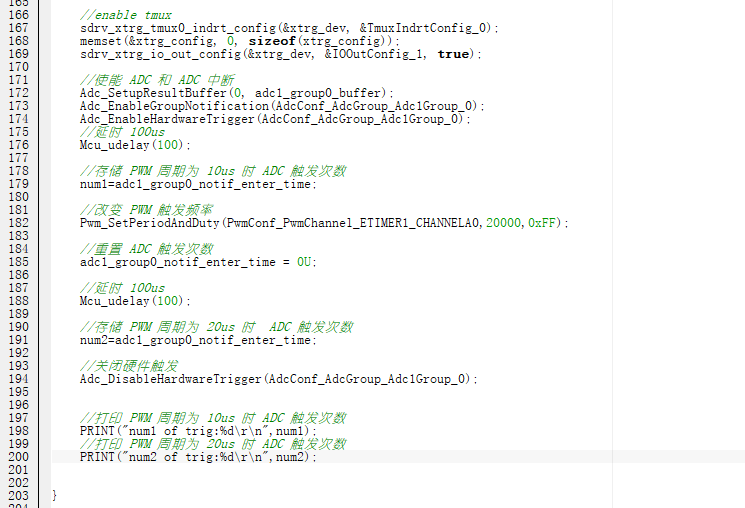
SemiDrive E3 MCAL 配置 :PWM 硬件触发 ADC 采样
一、前言 在使用 ADC 进行采样时,ADC 的硬件触发采样是 ADC 的典型应用。 本文将介绍 SemiDrive E3 MCAL 配置 :PWM 硬件触发 ADC 采样。 硬件平台:芯驰 E3640 Gateway 开发板 软件平台:SemiDrive_E3_MCAL_V3.0 二、EB 配置 2.1 ADC 配置 ADC 的 Hardware 触发对应的是 ADC 中 Gr

STM32定时器PWM输出
STM32定时器PWM(脉冲宽度调制)输出原理,在使用固件库时,主要涉及定时器的配置以及PWM信号的生成。以下是对该原理的详细解释: 一、PWM基本概念 PWM(Pulse Width Modulation)是一种通过改变脉冲宽度来控制模拟信号平均值的技术。在STM32中,PWM信号由定时器生成,其频率和占空比分别由定时器的自动重装载寄存器(ARR)和比较寄存器(CCR)决定。 所谓脉宽调制

TIM输出比较之PWM驱动直流电机应用案例
文章目录 前言一、应用案例演示二、电路接线图三、应用案例代码四、应用案例分析4.1 初始化PWM模块4.1.1 RCC开启时钟4.1.2 配置时基单元4.1.3 配置输出比较单元4.1.4 配置GPIO4.1.5 运行控制 4.2 PWM输出模块4.3 电机模块4.3.1 Motor初始化模块4.3.2 电机调速模块 4.4 主程序 前言 提示:本文主要用作在学习江科大自化

PWM驱动电机系列——PID控制 (各电机设备之间的驱动差异及区别)自动控制系统的性能指标
电机驱动 直流电机:类似于驱动LED亮灭一样,根据电机的电路原理图判断是什么数字电平有效。 步进电机:类似于驱动LED的周期翻转一样,在一个周期里面进行对步进电机的IO电平的自动翻转,LED=!LED 。(1)使用的定时器方式,设置一个确定的定时器周期 (2)PWM驱动 可以这样简单理解,首先要区分两种接线方法,一种是共阳极接法,就是PUL+和DIR+都是接5V,而PUL-就是你要输出脉冲的
用逻辑分析仪采集PWM波形,出现断断续续的脉冲解决办法
有时候用逻辑分析仪采集PWM波形时,会发现采集到的PWM波形在一段规则的PWM后会出现一段较长的高电平或低电平,这是因为逻辑分析仪的上位机采集参数设置不合适,应该适当调高采样频率。 10M Samples 1MHz 10M Samples 2MHz 10M Samples 4MHz 50M Samples 12MH
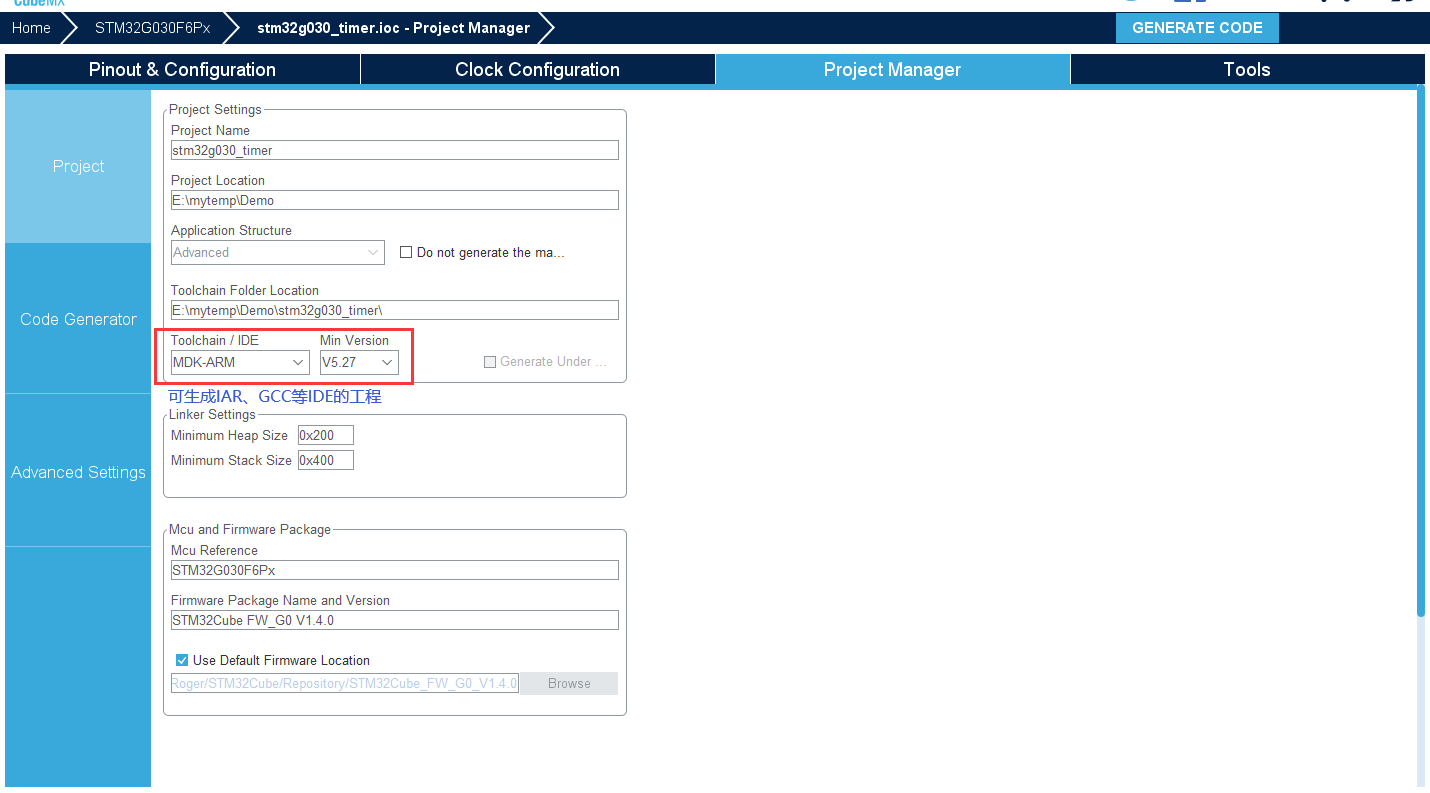
STM32G030F6使用CubeMx配置PWM实验
1. 使用 CubeMx 创建 PWM 工程 打开 CubeMx 软件,选中我们此次使用的单片机型号 STM32G030F6P6 ,点击 StartProject. 配置定时器 配置定时器1的通道1和通道2 产生PWM; 设置定时器1的主频:设置了( 63 + 1) 分频即定时器主频为1M 设置PWM定时的周期计数为 1000 即 1000HZ 设置通道一 翻转的计数值为 500 即
smart210 linux3.0.8内核蜂鸣器pwm驱动分析
刚刚移植这个pwm驱动到linux3.7.4,发现了一些问题,所以把这个3.0.8的pwm驱动看看,友善带的pwm驱动为mini210-pwm.c,这个只是这个驱动的一部分,直接搬到3.7.4内核下不能用,让我们来好好看看这个驱动的实现吧 static int __init mini210_pwm_dev_init(void) {int ret;ret = gpio_request(BUZZ
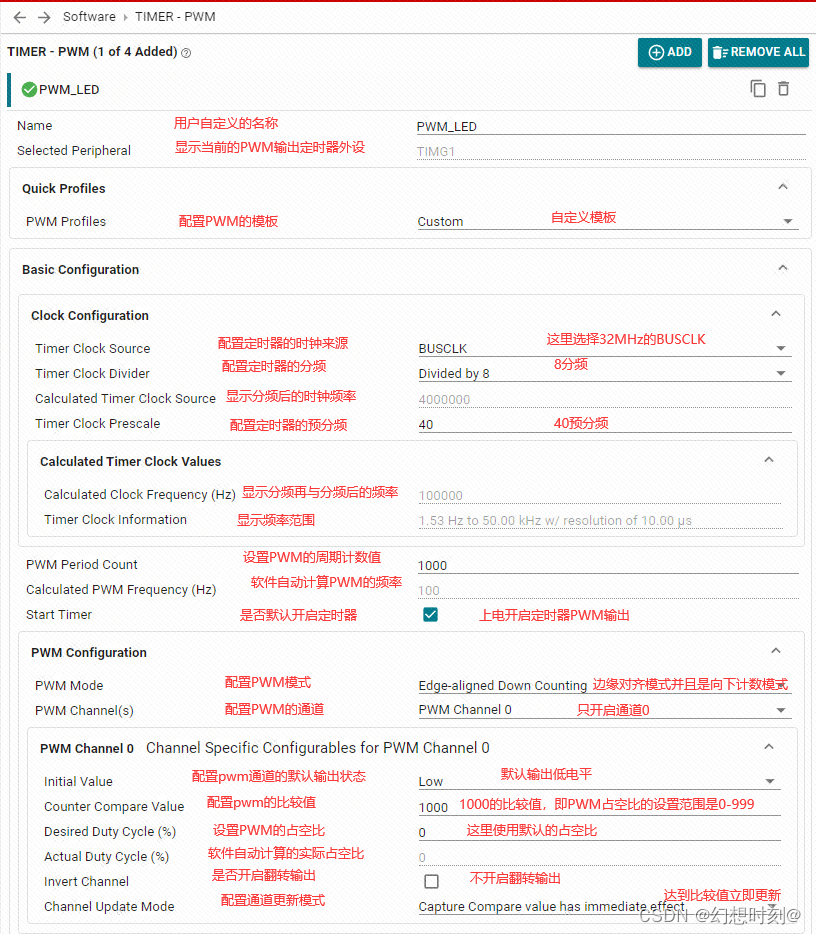
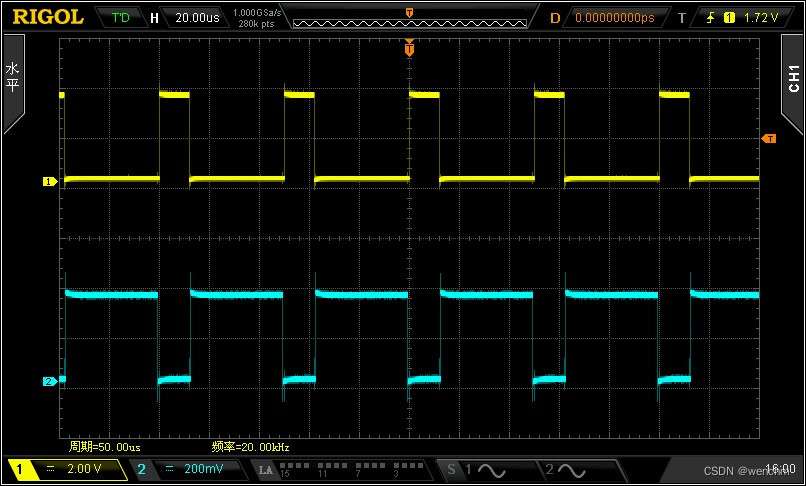
MSPM0G3507——PWM
在sysconfig中,左侧可以选择MCU的外设,我们找到并点击TIMER-PWM选项卡,在TIMER-PWM中点击ADD,就可以添加定时器下的PWM外设。 这里设置通道0为100Hz的频率,0%占空比的PWM,周期计数值为1000,比较值也设置为1000,这样的话从1000开始向下计数,每遇到一次1000PWM的状态就翻转一次。

迅为RK3568驱动教程第十八期-PWM
系统性PWM课程,完全掌握PWM。采用框架学习法,从基础知识、PWM子系统框架、API函数理论由面到点,逐个击破。通过SG90舵机,呼吸灯的控制把理论转为动手能力。最后从零实现输入捕获驱动程序,深入探究,体验一把原厂工程师的工作。 目录: 0.总领 1.什么是PWM? 2.iTOP-RK3568开发板PWM接口介绍 3.pwm子系统框架 4.实验外设:SG90舵机介绍 5.使用sysfs接口操作p
细说MCU输出互补型PWM波形的实现方法
目录 一、硬件及工程 二、建立工程 1、TIM1引脚 2、建立工程 (1)配置GPIO (2)选择时钟源和Debug模式 (3)配置定时器 (4)配置中断 (5)配置系统时钟 三 、代码修改 1、重定义回调函数 2、使能PWM输出 四、下载和运行 互补型的PWM输出就是两路输出是完全互补的,某时刻一路输出高电平,另外一路就输出低电平。这种互补
【GD32定时器】高级定时器生成PWM波+定时器外设配置DMA使用
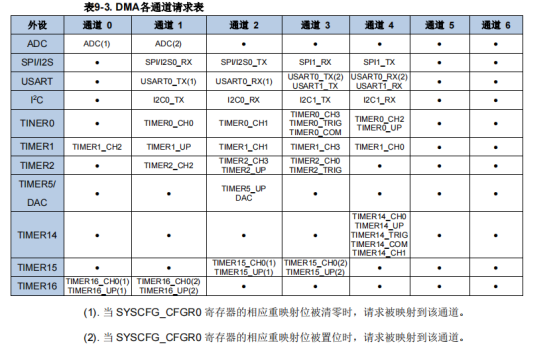
基本定时器和系统时钟配置可以参考以下文章, 文章链接为: 【GD32系列–基本定时器Timer + 定时1ms 灯光间隔1s闪烁例程】 【GD32】_时钟架构及系统时钟频率配置 【GD32】 TIMER通用定时器学习+PWM输出占空比控制LED 目录标题 一 、DMA简介1 DMA 操作2 中断3 DMA 请求映射 二、代码分析:1 定时器外设配置DMA使用2 定时器用来产生PWM信号,实
STM32高级控制定时器(STM32F103):PWM输出模式
目录 概述 1 PWM模式介绍 2 PWM类型 2.1 PWM边缘对齐模式 2.2 PWM中心对齐模式 3 使用STM32Cube配置PWM 3.1 STM32Cube配置参数 3.2 生成Project 4 设置PWM占空比 4.1 函数介绍 4.3 函数源码 5 测试代码 5.1 编写测试代码 5.2 函数源码 6 运行代码 概述 本文主要介绍ST
【GD32】 TIMER通用定时器学习+PWM输出占空比控制LED
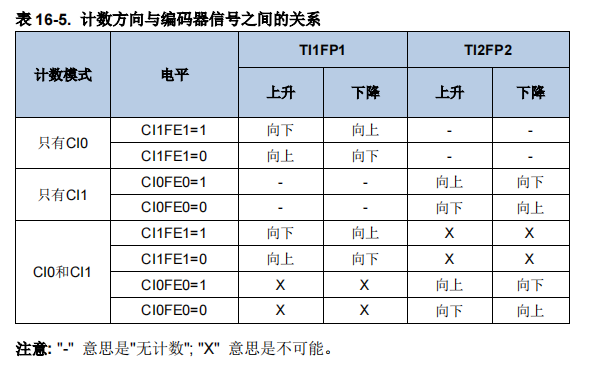
扩展:对PWM波形的输出进行捕获 目录 一、简介二、具体功能描述1、时钟源的选择:2、预分频器:3、计数模式:向上计数模式:向下计数模式:中央对齐模式: 4、捕获/比较通道 输入捕获模式 输出比较模式: 5、PWM模式6、正交译码器 三、示例目标任务1:输出模式目标任务2:输入捕获目标任务3:计数 一、简介 基本定时器和系统时钟配置可以参考我的上一篇文章, 文章链接为: 【

高性能8位单片机 CA51M151,1T 8051内核 / 内置12位ADC / 16 位PWM / 支持触摸 / 8K MTP
CA51M151 系列芯片是基于 1T 8051 内核的 8 位微控制器,不仅保留了传统 8051 芯片的基本特性,通常情况下运行速度比传统的 8051 芯片快 10 倍,性能更加优越。芯片内置 8 KB MTP 程序存储器,256Byte 内部RAM,512Byte 外部 RAM 及 512Byte EEPROM。还集成了 26 路 12 位 ADC、 26 路 Touch Key(不需外接电容