本文主要是介绍STM32系列——F103C8T6 控制SG90舵机(HAL库),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 一、舵机控制原理
- 二、.CubeMX配置
- 配置RCC、SYS、时钟树
- 配置RCC
- 配置SYS
- 配置时钟树
- 配置定时器产生PWM波形
- Keil5代码
- 接线图及效果
- 如果您发现文章有错误请与我留言,感谢
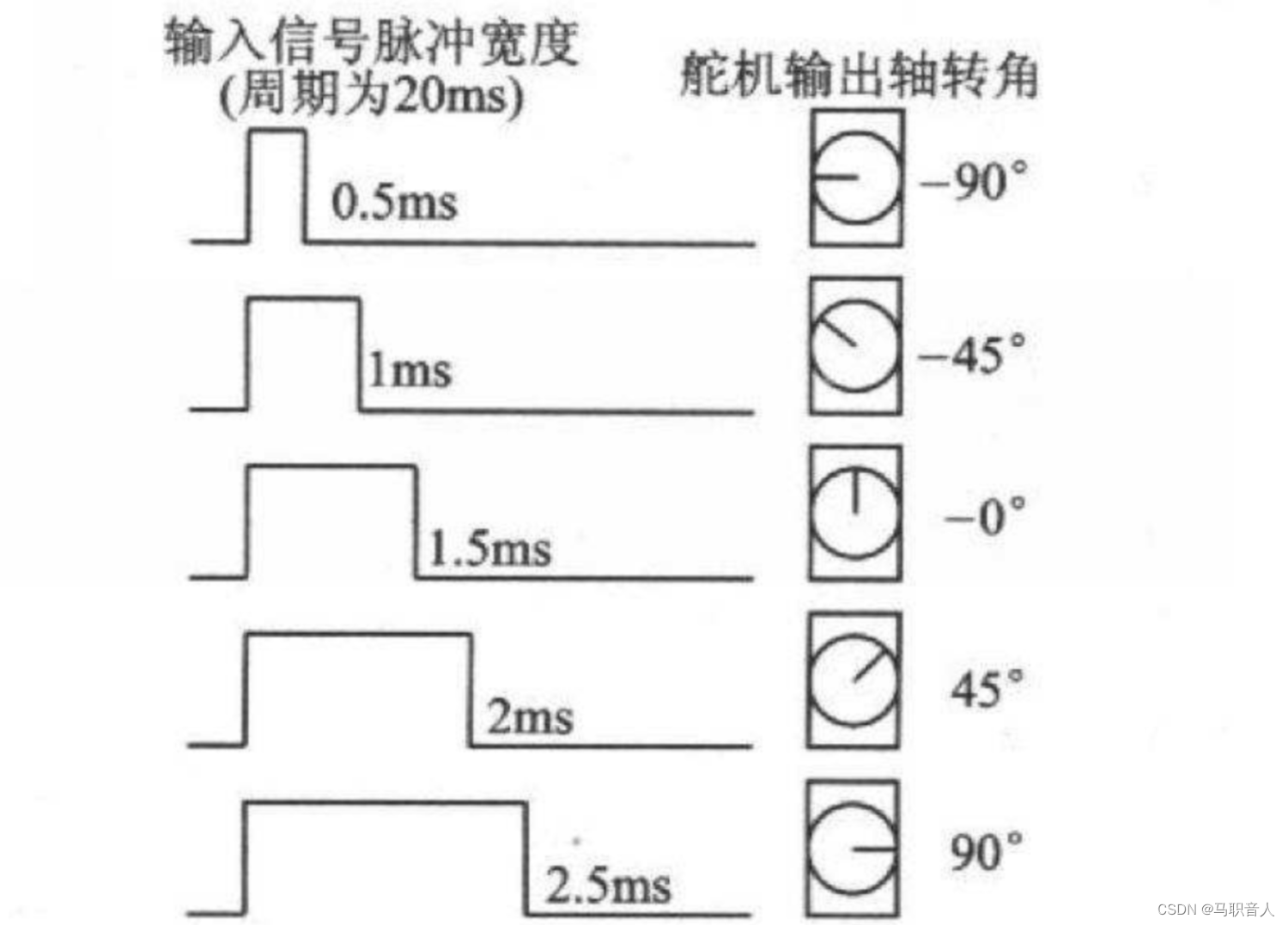
一、舵机控制原理
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms以180度角度伺服为例,那么对应的控制关系是这样的:
二、.CubeMX配置
借用博主的图片
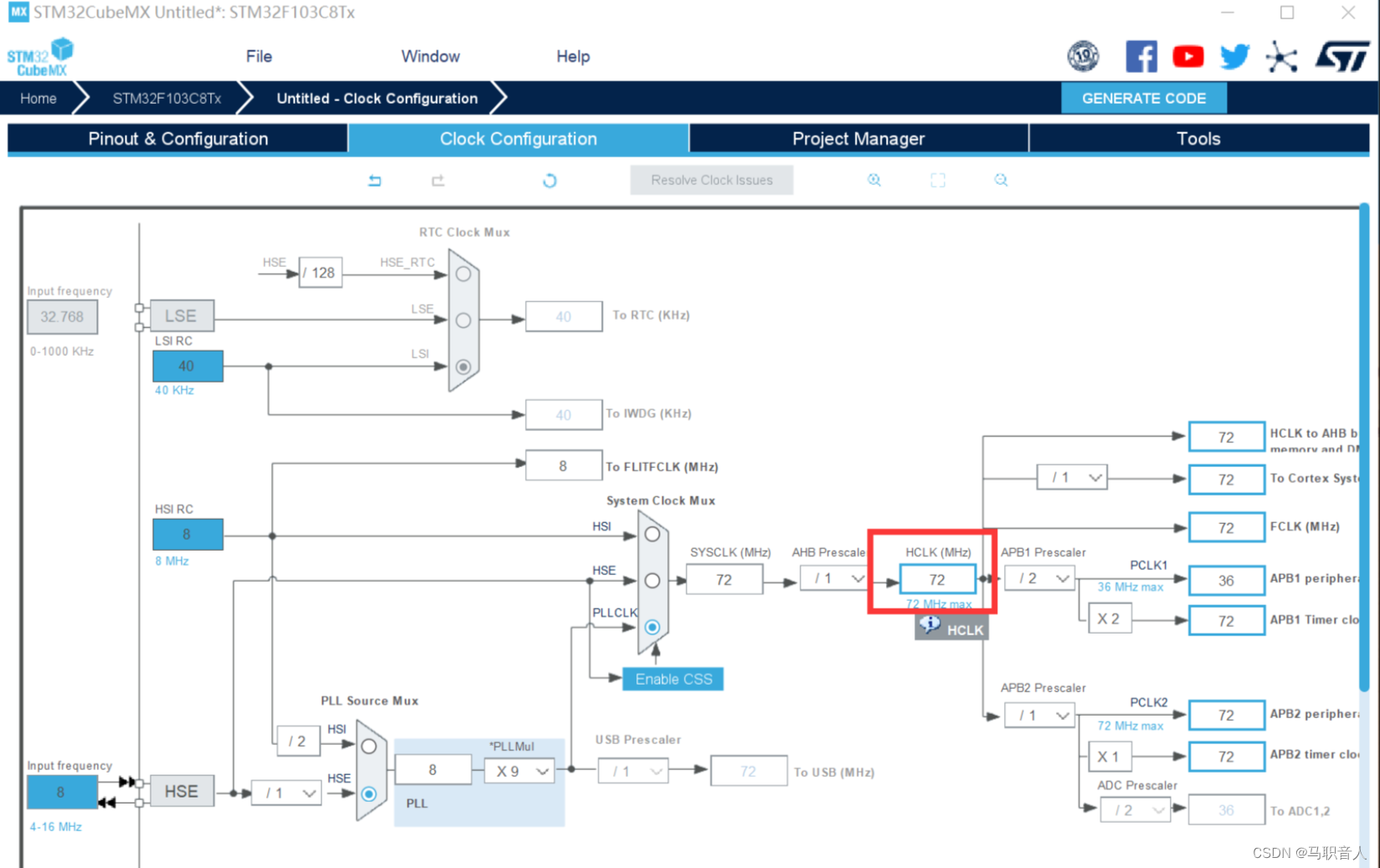
配置RCC、SYS、时钟树
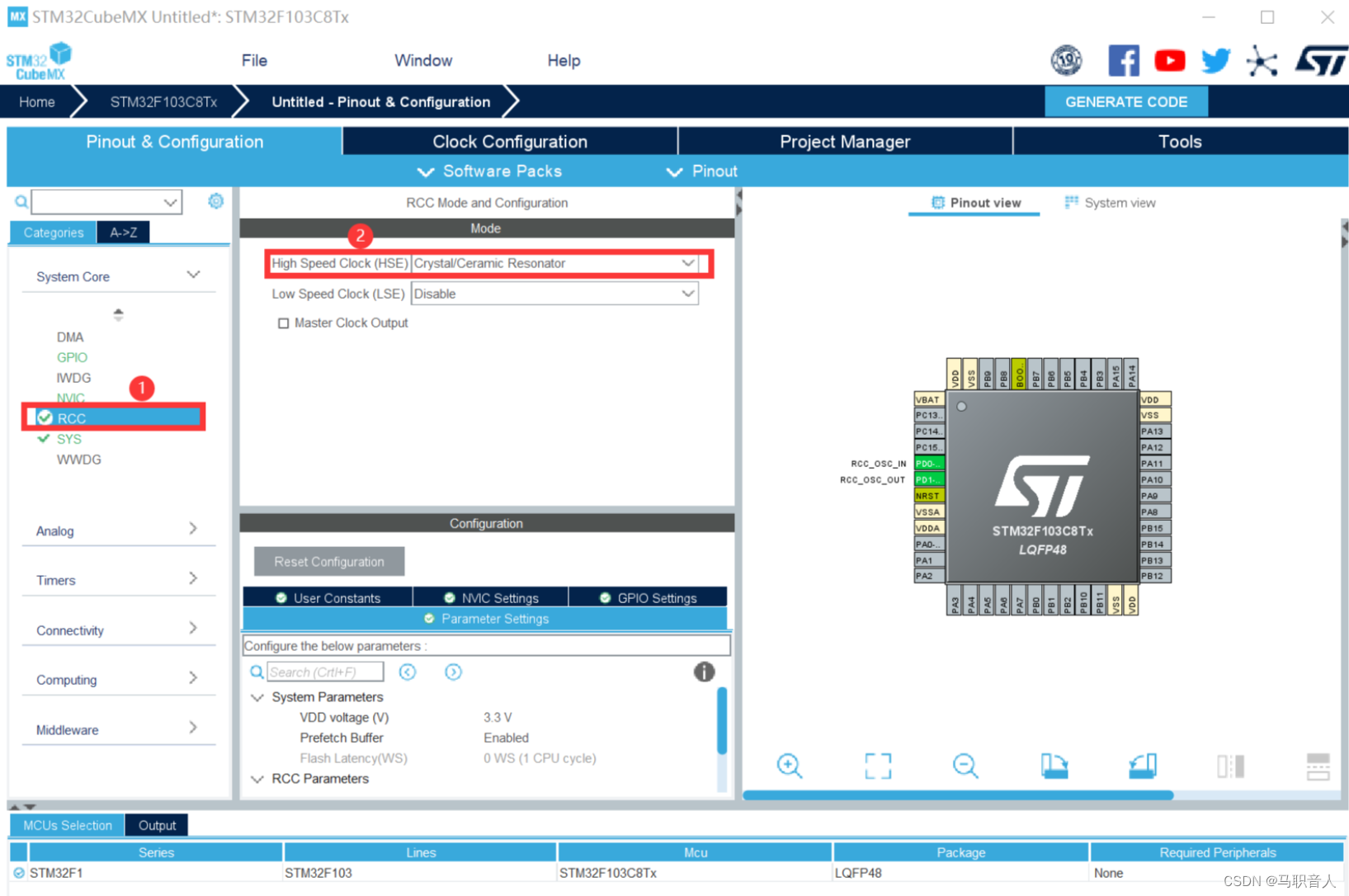
配置RCC
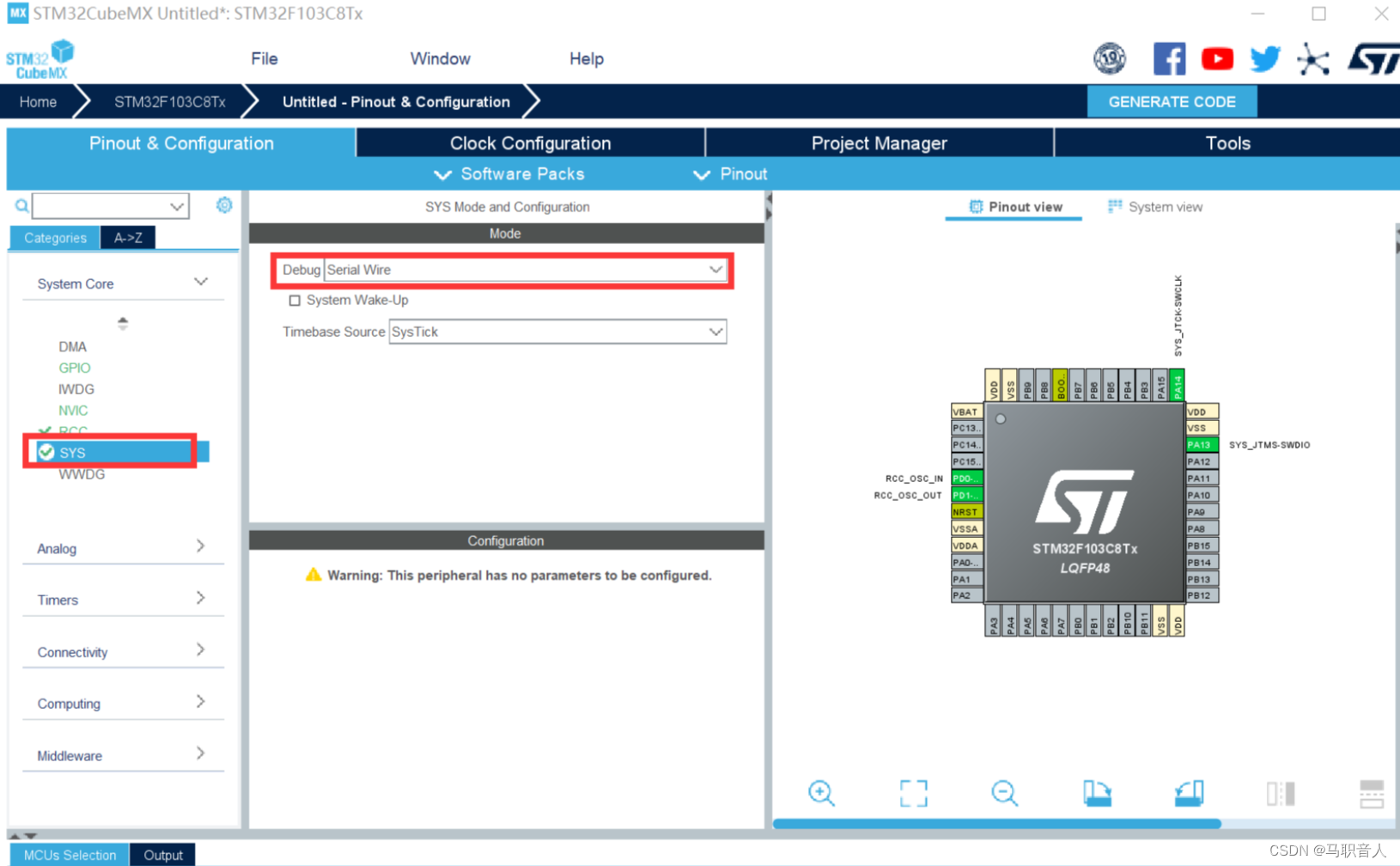
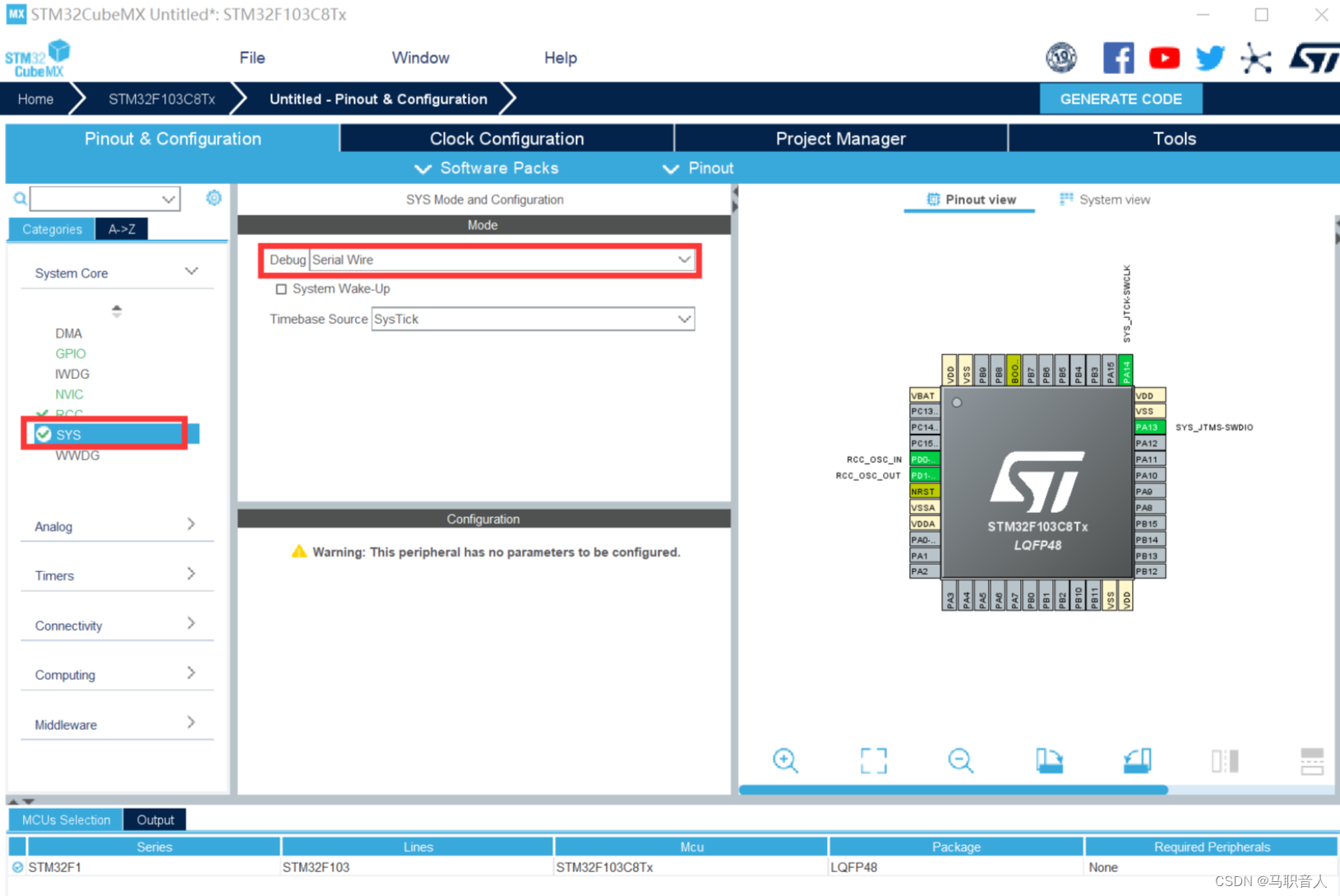
配置SYS
配置时钟树
配置定时器产生PWM波形
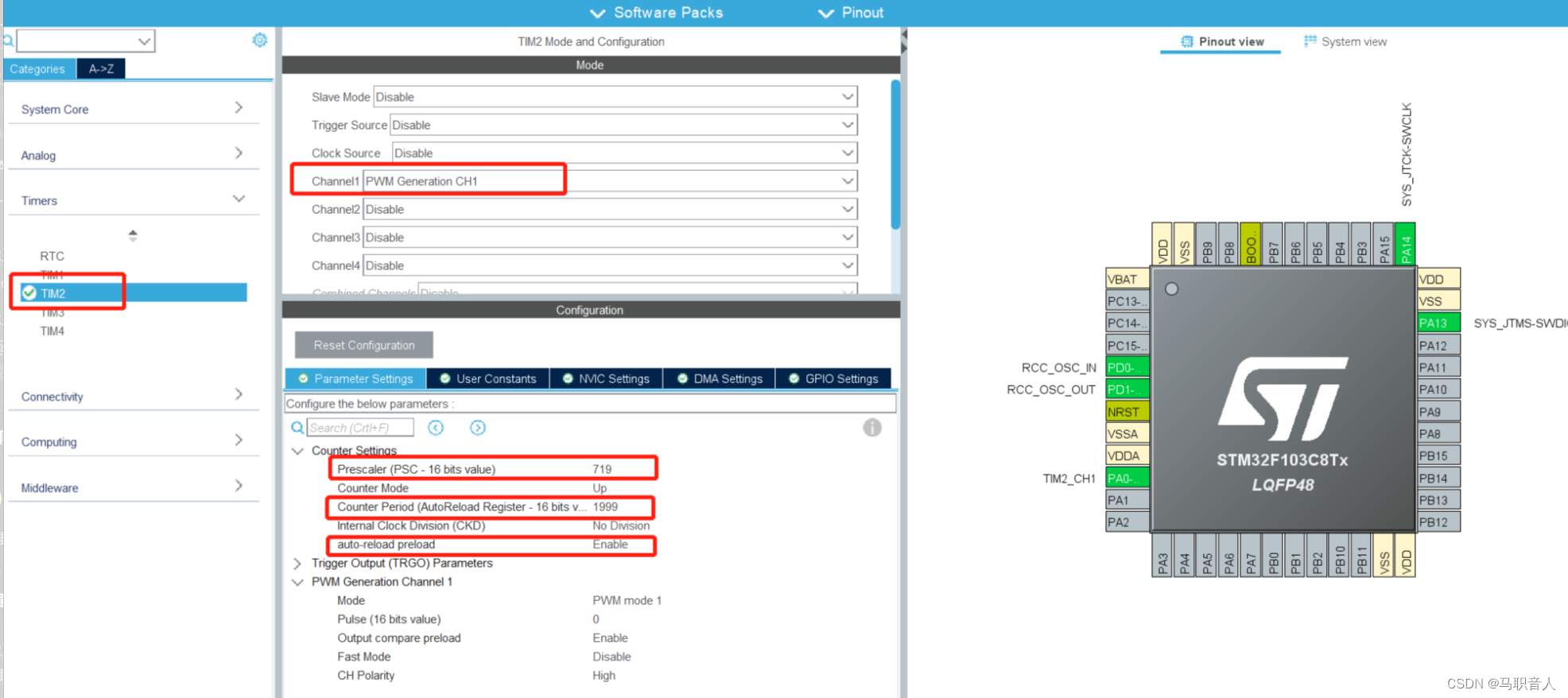
这里补充一个知识点
100HZ代表一秒放出100个脉冲
Prescaler意为预分频器
当预分频器设置为720-1时,72MHZ就变成100000HZ,
又因为g9舵机需要的频率是50HZ,也就是20ms
Counter Period为自动重装载寄存器
当自动重装载寄存器与计数器值一样时,计数器值会重置为0.
所以,当自动重装载寄存器的值设置为2000-1时,这时就为20ms的计数器。
此时产生PWM波形频率:72M / 719 / (1999+1) = 50HZ

Keil5代码
注意要先对定时器进行初始化
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);//定时器初始化
首先初始化各个外设,包括 GPIO、TIM2
MX_GPIO_Init();MX_TIM2_Init();
void DuoJi_Angle_TIM2(int angle , int time){int PWM ;PWM = 10 * angle/ 9 ;__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,PWM);HAL_Delay(time);}\
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM2_Init();/* USER CODE BEGIN 2 */HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){DuoJi_Angle_TIM2(0 , 1000);DuoJi_Angle_TIM2(45 , 1000);DuoJi_Angle_TIM2(90 , 1000);DuoJi_Angle_TIM2(135 , 1000);DuoJi_Angle_TIM2(180, 1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}我们直接封装成关于角度和延时的函数,
不用再计算PWM了
void DuoJi_Angle_TIM2(int angle , int time){int PWM ;PWM = 10 * angle/ 9 ;__HAL_TIM_SET_COMPARE(&htim2,TIM_CHANNEL_1,PWM);HAL_Delay(time);}
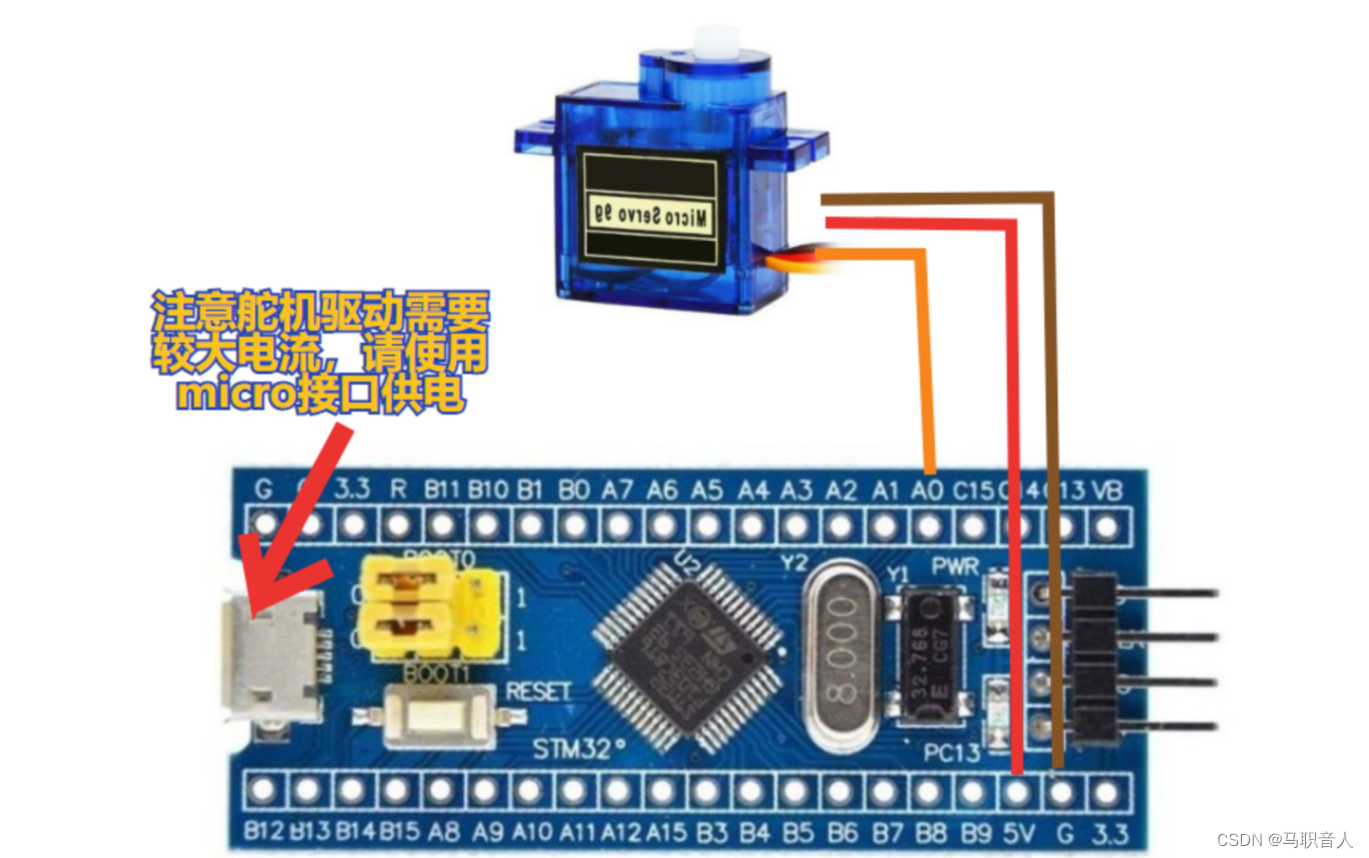
接线图及效果
QQ视频20240317120641
如果您发现文章有错误请与我留言,感谢
这篇关于STM32系列——F103C8T6 控制SG90舵机(HAL库)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







