sg90专题
wiringpi库的应用 -- sg90 定时器 oled
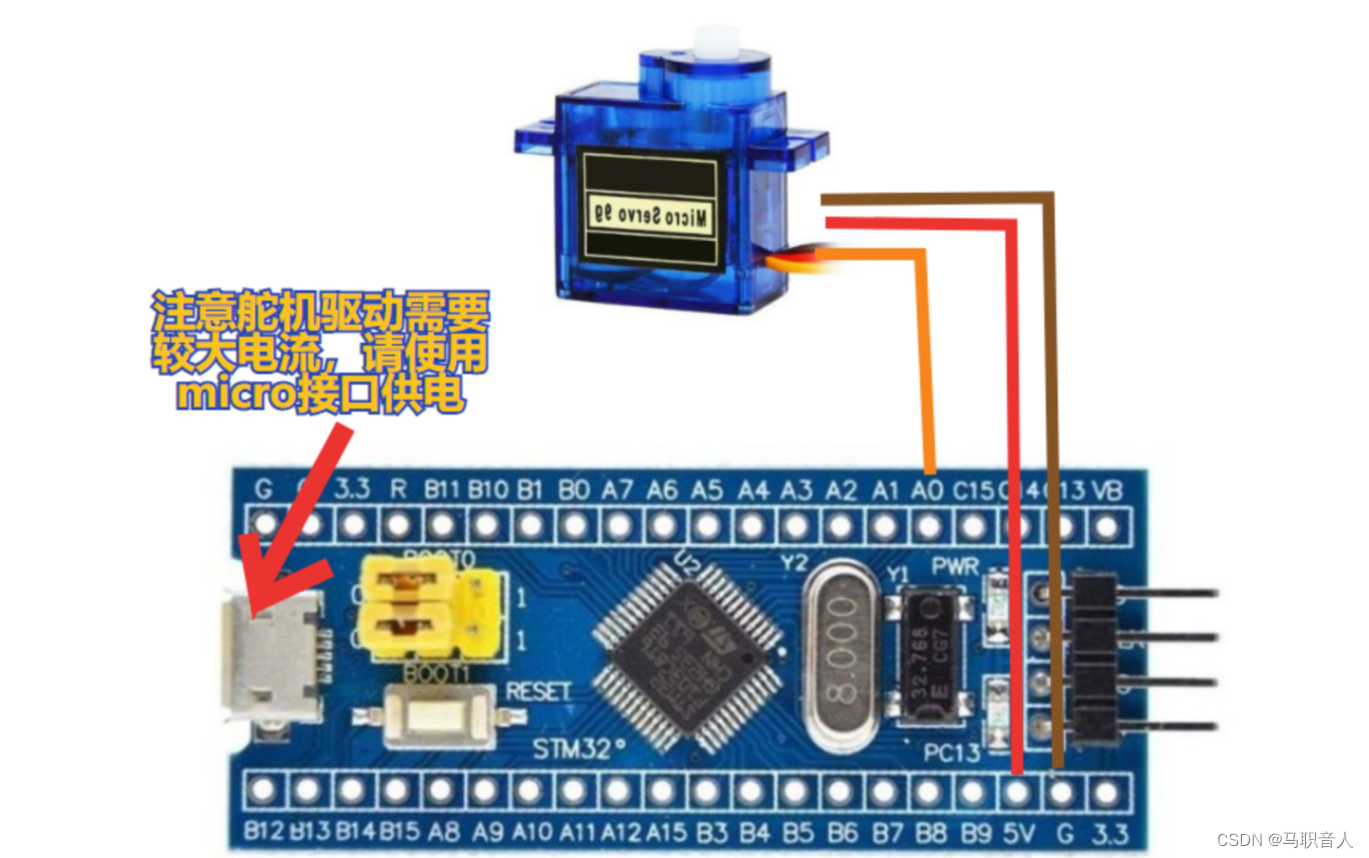
sg 90舵机: 接线: VCC -- 红 GND -- 地 信号线 -- 黄 -- pwm 定时器: 先玩定时器: sg90 需要的pwm波需要定时器输出,so我们得先来玩一下定时器 分析:实现定时器,通过itimerval结构体以及函数setitimer产生的信号,系统随之使用signal信号处理函数来处理产生的定时信号。从而实现定时器。 先

2.SG90舵机模块
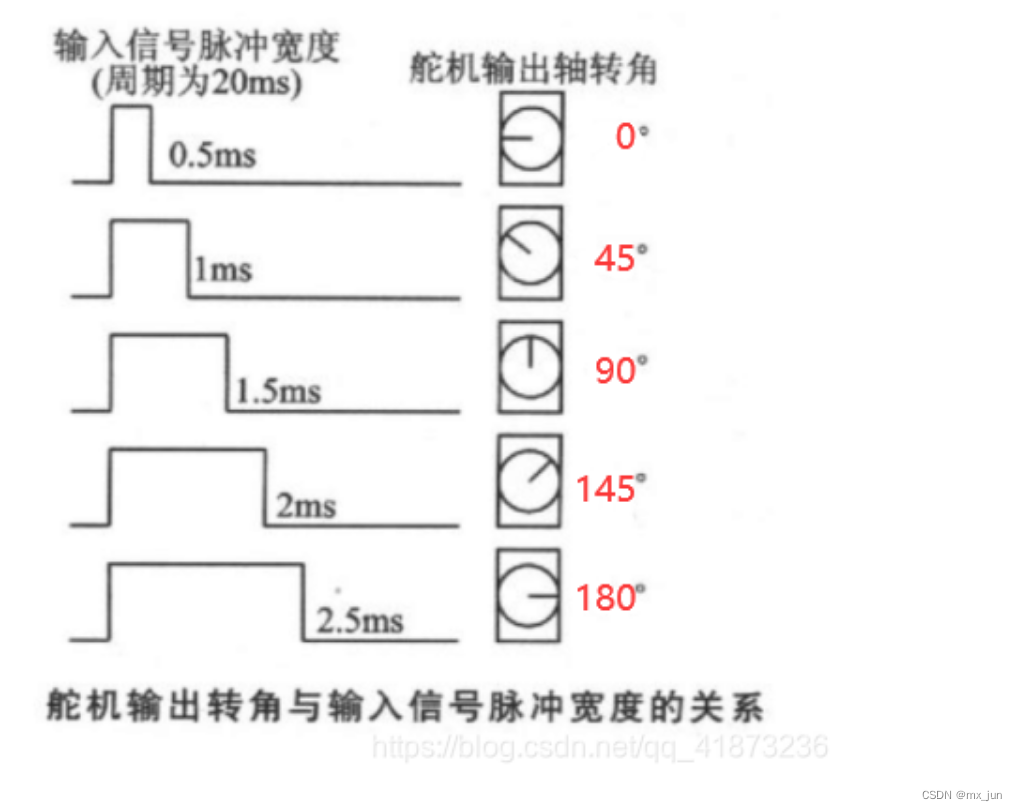
当我们输出一段脉冲信号的时候就可以调节舵机的角度 我们可以从原理图可以看到舵机的脚在PA6 从芯片手册我们又可以看到PA6对应TIM3_CH1,并且不用开启部分重映像就能使用 新建Servo.c存放PWM初始化 配置PWM void Servo_TIM3_Init(u16 arr,u16 psc){//开启TIM3的时钟RCC_APB1PeriphClockCmd(RC

51单片机学习笔记17 4线双极性马达和SG90舵机
51单片机学习笔记17 4线双极性马达和SG90舵机 一、四线双极性电机控制1. 四线双极性电机工作方式介绍(1)工作原理(2)驱动方式(3)极性区分(4)驱动方式 2. TC1508S芯片介绍(1)主要特性(2)引脚(3)输入/输出逻辑表 3. 模块电路图4. 代码实现dc_motor_4_wire_utils.cmain.c 二、SG90舵机控制1. SG90简介2. 硬件连接3. 控
STM32系列——F103C8T6 控制SG90舵机(HAL库)
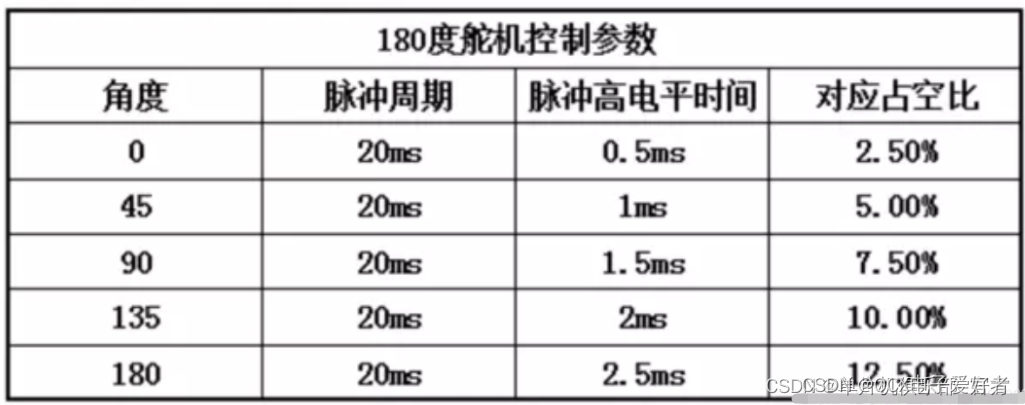
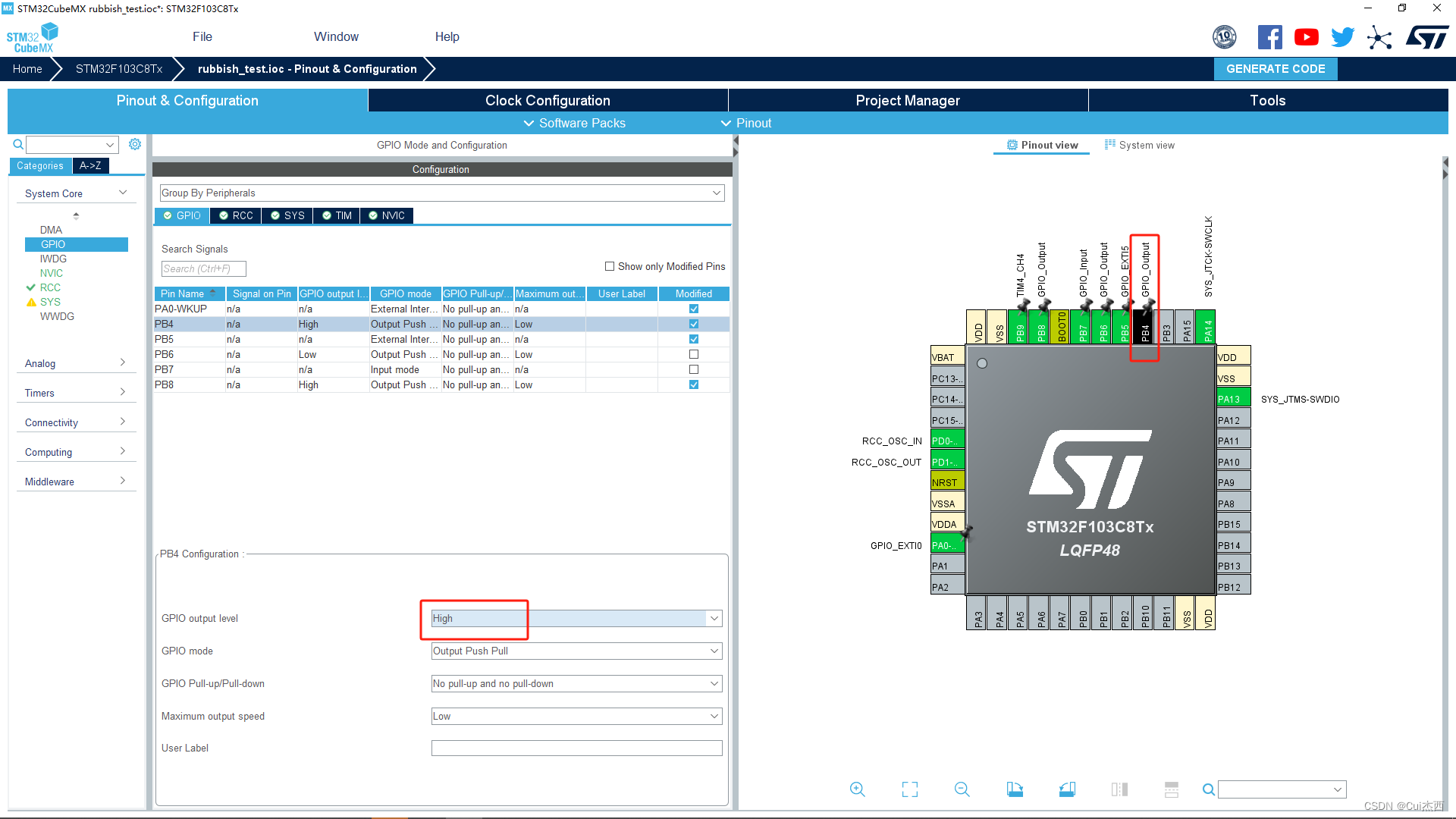
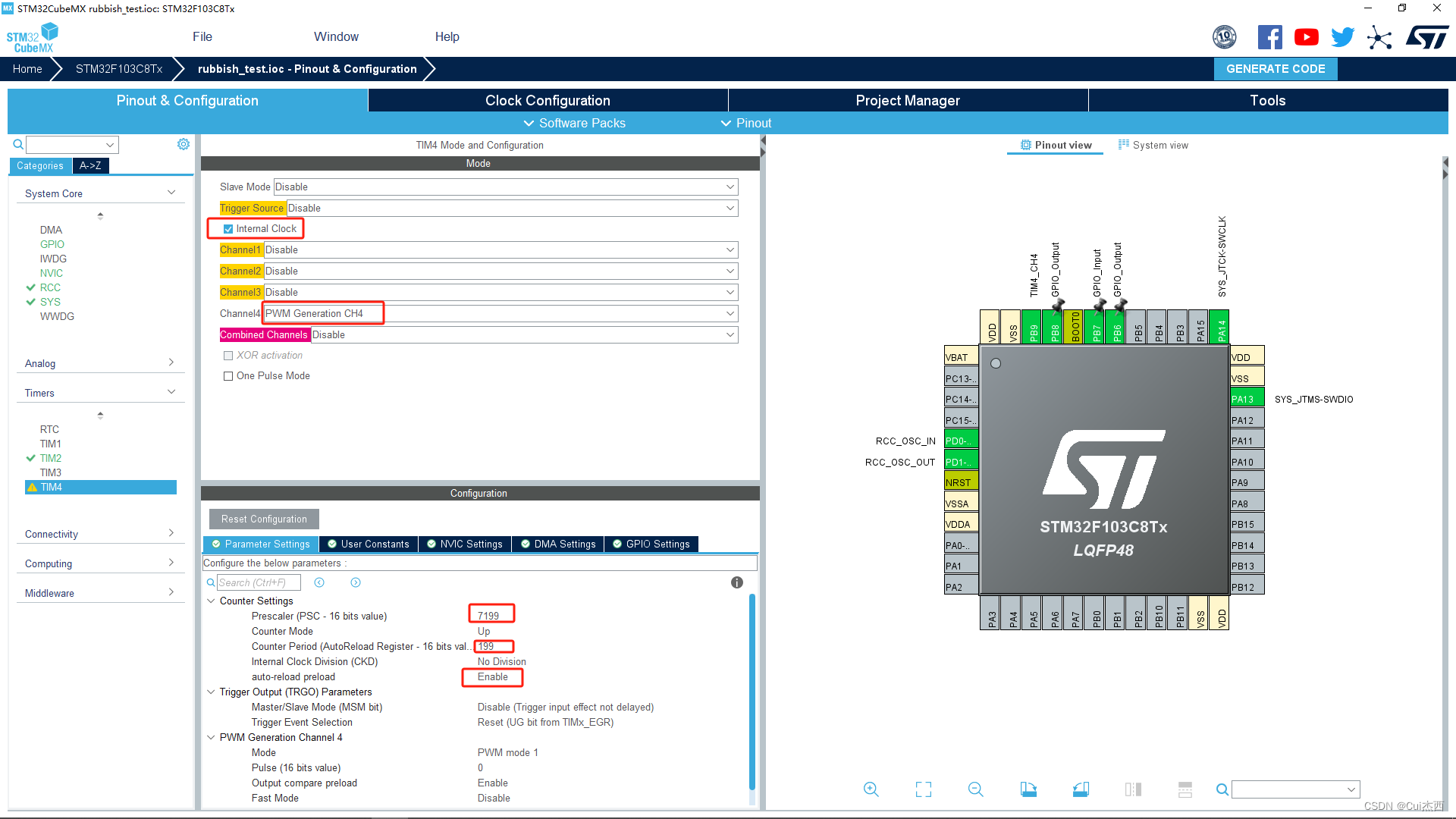
文章目录 一、舵机控制原理二、.CubeMX配置配置RCC、SYS、时钟树配置RCC配置SYS配置时钟树配置定时器产生PWM波形 Keil5代码接线图及效果如果您发现文章有错误请与我留言,感谢 一、舵机控制原理 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms以180度角度伺服为例,那么对应

msp430f5529标准库学习之SG90舵机使用
SG90舵机一般分为180度和360度,他们的控制方法虽然有些不一样,但是实质也是控制pwm占空比来控制转向。 一般蓝色的是180度,另一个就是360度。 引脚说明: 棕色线 GND 红色线 VCC(5V) 黄色线 PWM输入线 180度舵机控制方法 pwm周期设置为20ms 高电平0.5ms 0 ° 高电平1.0
STM32F103C8T6第三天:pwm、sg90、超声波、距离感应按键开盖震动开盖蜂鸣器
1. 定时器介绍1(317.21) 软件定时(之前的定时方法)(软件延时)缺点:不精确、占用CPU资源 void Delay500ms() //@11.0592MHz{unsigned char i, j, k;_nop_();i = 4;j = 129;k = 119;do{do{while (--k);} while (--j);} while (--i);} 定时器工作原理:
STM32F103C8T6第三天:pwm、sg90、超声波、距离感应按键开盖震动开盖蜂鸣器
1. 定时器介绍1(317.21) 软件定时(之前的定时方法)(软件延时)缺点:不精确、占用CPU资源 void Delay500ms() //@11.0592MHz{unsigned char i, j, k;_nop_();i = 4;j = 129;k = 119;do{do{while (--k);} while (--j);} while (--i);} 定时器工作原理:
通过51单片机控制SG90舵机按角度正反转转动
一、前言 本文介绍如何通过51单片机控制SG90舵机实现角度的正反转转动。SG90舵机是一种常用的微型舵机,具有体积小、重量轻、结构简单等特点,被广泛应用于机器人、遥控模型和各种自动控制系统中。 使用51单片机(STC89C52)作为控制器,利用其强大的IO口和定时器功能来实现对SG90舵机的控制。通过编程控制,可以精确地控制舵机按指定的角度进行正转或反转运动。 舵机的控制是通过脉冲宽度调制

【Proteus仿真】【Arduino单片机】SG90舵机控制
文章目录 一、功能简介二、软件设计三、实验现象联系作者 一、功能简介 本项目使用Proteus8仿真Arduino单片机控制器,使用SG90舵机等。 主要功能: 系统运行后,舵机开始运行。 二、软件设计 /*作者:嗨小易(QQ:3443792007)*/#include "public.h"#include "sg90.h"//初始化运行一次void setup

STM32应用(一)控制舵机SG90/MG996R/数字舵机
文章目录 1.舵机SG901.1 舵机参数1.2 实物图和接线1.3 工程配置和代码编写1.4 代码分享 2.舵机MG996R(180°、360°)2.1 舵机参数2.2 实物图2.3 补充:360°舵机 3.数字舵机3.1 舵机参数3.2 实物图 舵机的控制实际上就是对占空比的设定。 1.舵机SG90 1.1 舵机参数 产品类型:SG90舵机 产品扭矩:2.0kg/
基于51单片机、SG90舵机的笔记本电脑遥控远程开机方案
1、前提:现在的电视就是个广告播放器,所有内容都要开会员,并且电视自带软件看视频总是有一种模糊的感觉。家中闲置一Z480笔记本电脑,连接HDMI可输出1080P分辨率,日常看电视足够了。于是将笔记本电脑屏幕拆下,笔记本主机放到电视后面,刚好可以完美隐藏各种线。 2、问题:每次开机都要去电视后面按按钮,实在不符合本人懒惰的习惯,因此要想个办法远程开机。但是经过查询,笔记本电脑不支持上电开机,也不支

【Arduino开发】 Arduino使用电位器调节伺服马达SG90旋转角度
文章目录 1. 实验目的2. 知识点3. 原理图4. 实现代码5. 实验结果写在最后 1. 实验目的 使用可变电阻作为模拟信号输入使用可变电阻来控制伺服马达SG90的旋转角度 2. 知识点 伺服马达各个针脚对应的功能如下所示 图片来源:https://www.mahoo12138.cn/stm32-7.html 信号线也是使用模拟信号获取输出,我们这里使用~9针