本文主要是介绍1.SG90,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
一.实物图
二.原理图
三.简介
四.工作原理
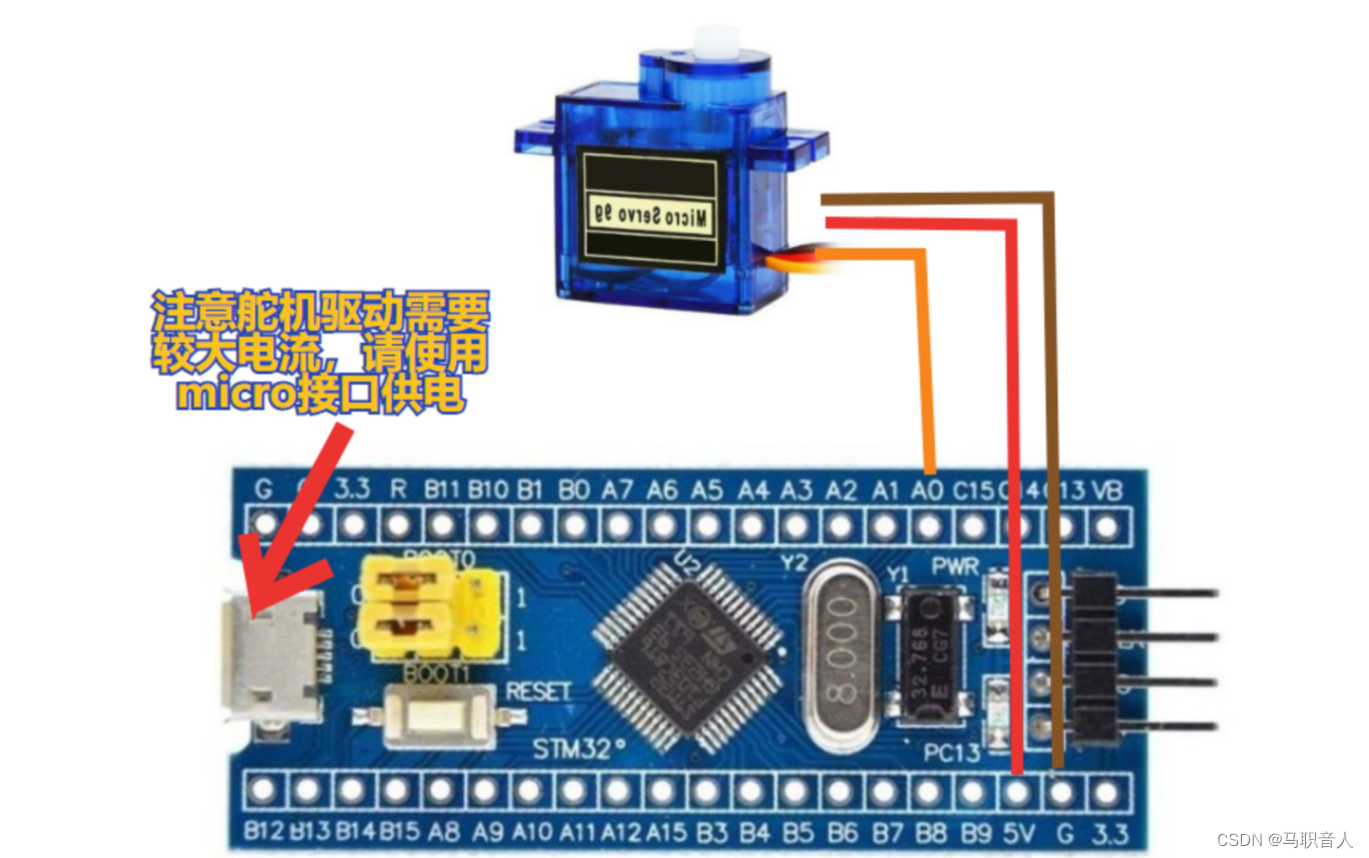
一.实物图

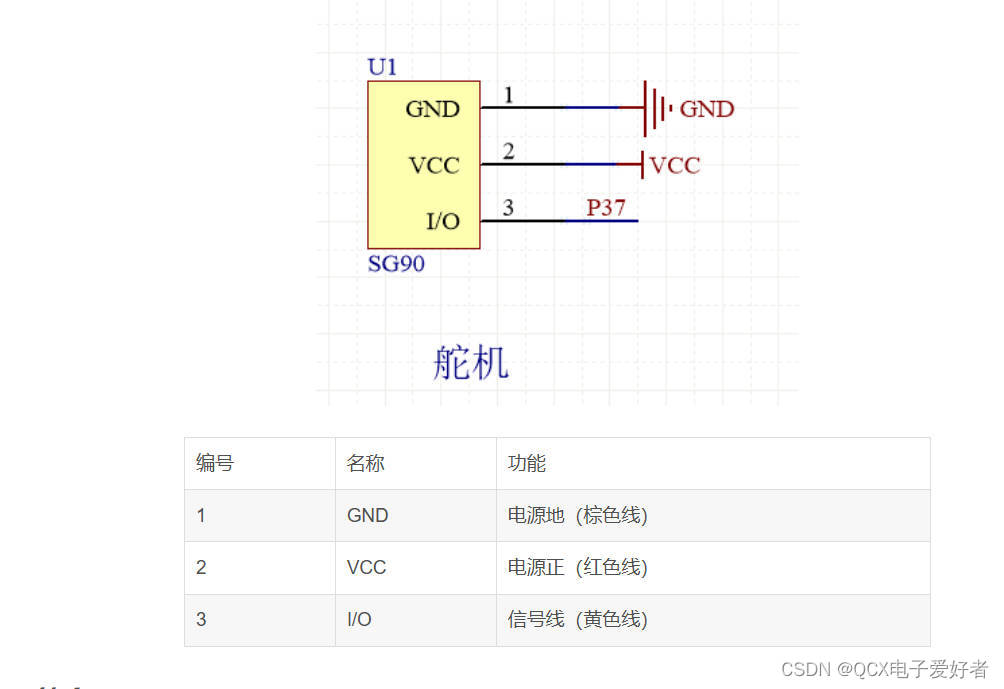
二.原理图
三.简介
舵机(英文叫Servo),是伺服电机的一种,伺服电机就是带有反馈环节的电机,这种电机可以进行精确的位置控制或者输出较高的扭矩。舵机也叫RC伺服器,通常用于机器人、遥控汽车,飞机航模等。类似舵机这样的伺服系统通常由小型电动机,电位计,嵌入式控制系统和变速箱组成。电机输出轴的位置由内部电位计不断采样测量,并与微控制器(例如STM32,Arduino)设置的目标位置进行比较;根据相应的偏差,控制设备会调整电机输出轴的实际位置,使其与目标位置匹配,这样就形成了闭环控制系统。
四.工作原理
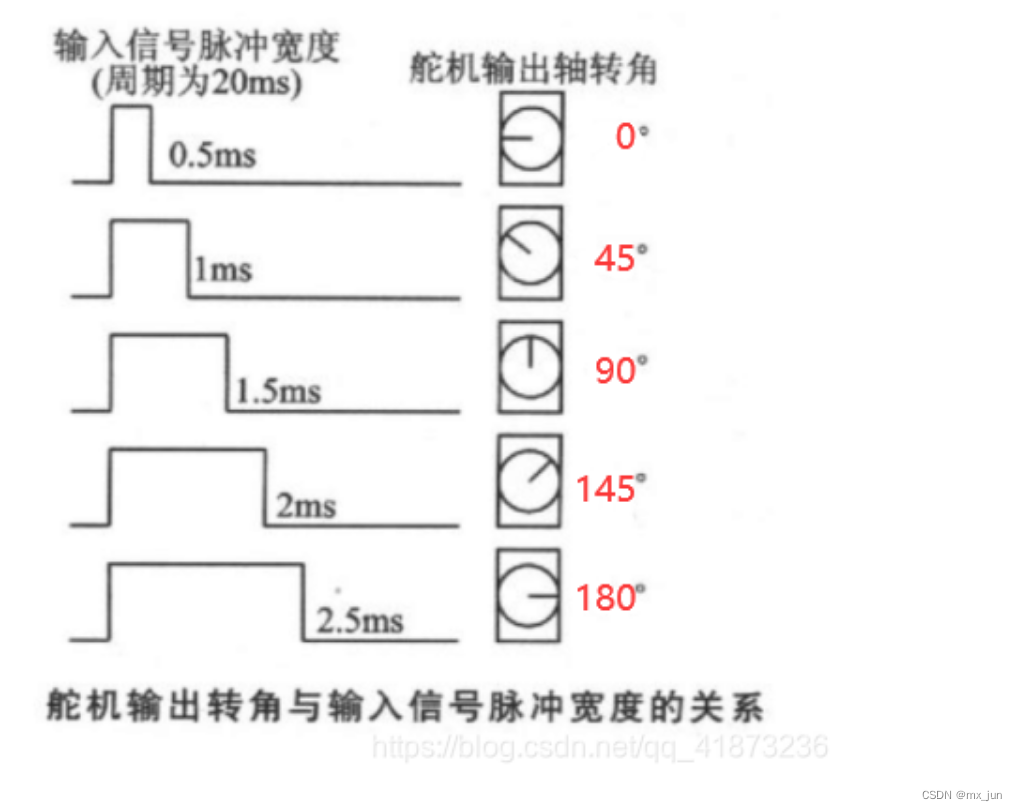
舵机内部有一个基准电路,产生周期为20ms、宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。经过电路板IC方向判断,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到位。
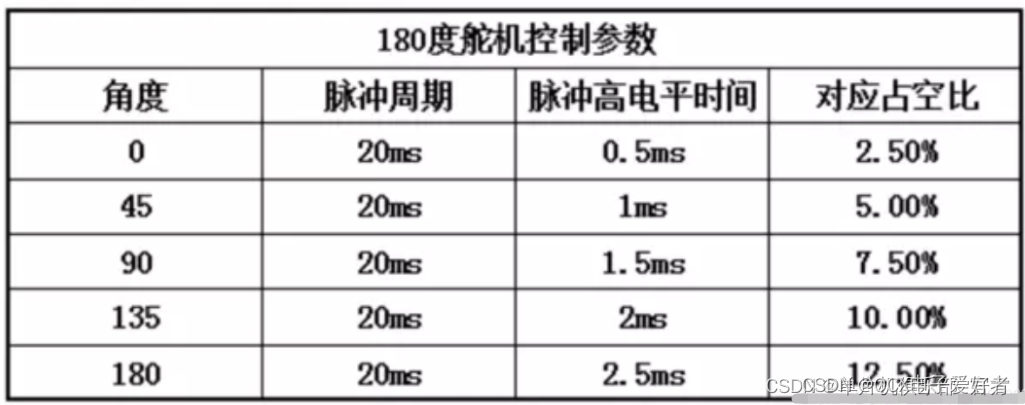
舵机转动的角度是通过调节PWM信号的占空比来实现的。标准的PWM信号的周期固定为20ms,理论上脉宽分布应该在1ms到2ms之间,实际上在0.5ms到2.5ms之间,脉宽与转角0°——180°相对应。不同厂家不同型号的舵机也会有所差异。
这篇关于1.SG90的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!