本文主要是介绍【Arduino开发】 Arduino使用电位器调节伺服马达SG90旋转角度,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1. 实验目的
- 2. 知识点
- 3. 原理图
- 4. 实现代码
- 5. 实验结果
- 写在最后
1. 实验目的
- 使用可变电阻作为模拟信号输入
- 使用可变电阻来控制
伺服马达SG90的旋转角度
2. 知识点
伺服马达各个针脚对应的功能如下所示

图片来源:https://www.mahoo12138.cn/stm32-7.html
信号线也是使用模拟信号获取输出,我们这里使用~9针脚
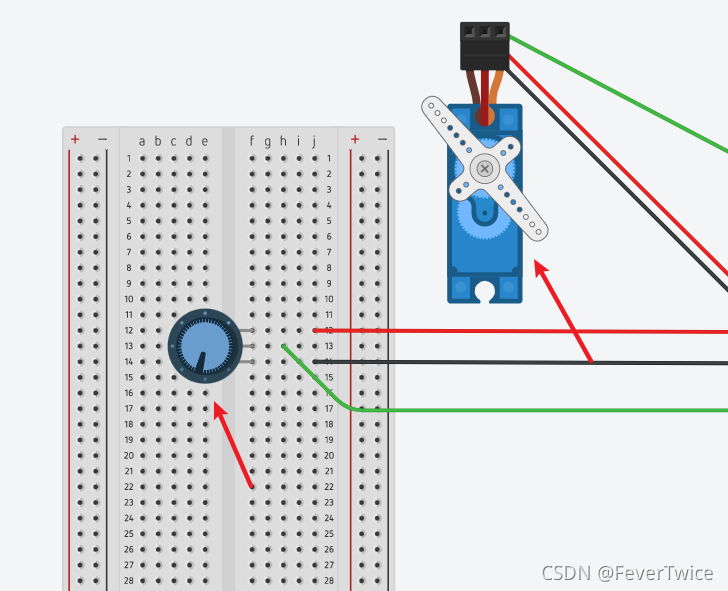
3. 原理图

局部

4. 实现代码
/*伺服马达实验
*/// 导入伺服马达的函数
#include <Servo.h>int val = 0;
int inputSignal = A0;Servo myservo; // 马达名字void setup() {myservo.attach(9); // 马达使用9号控制
}void loop() {val = analogRead(inputSignal); // 读取电位器的输入val = map(val, 0, 1023, 0, 180); // 映射到伺服电机myservo.write(val); // 设置伺服电机的转向角度delay(15); // 延时使得伺服电机有时间旋转
}
5. 实验结果
通过拨动电位器,可以发现伺服马达的转动角度随之改变
角度1
角度2

写在最后
注:本专栏实验均使用免费的仿真平台TinkerCAD,传送门如下
传送门:ThinkerCAD
各位看官,都看到这里了,麻烦动动手指头给博主来个点赞8,您的支持作者最大的创作动力哟!
<(^-^)>
才疏学浅,若有纰漏,恳请斧正
本文章仅用于各位同志作为学习交流之用,不作任何商业用途,若涉及版权问题请速与作者联系,望悉知
这篇关于【Arduino开发】 Arduino使用电位器调节伺服马达SG90旋转角度的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







