红绿灯专题

基于yolov8的红绿灯目标检测训练与Streamlit部署(代码+教程)
项目背景 随着智能交通系统的快速发展,自动驾驶技术逐渐成为研究的热点。在自动驾驶领域中,准确识别道路上的交通信号灯是确保车辆安全行驶的关键技术之一。近年来,深度学习技术的发展为交通信号灯的识别提供了强大的支持。YOLO(You Only Look Once)作为一种高效的物体检测算法,在实时场景下有着广泛的应用。本文将介绍如何使用YOLOv8模型进行红绿灯检测,并结合Streamlit实现一个简
canvas绘制红绿灯路口(二)
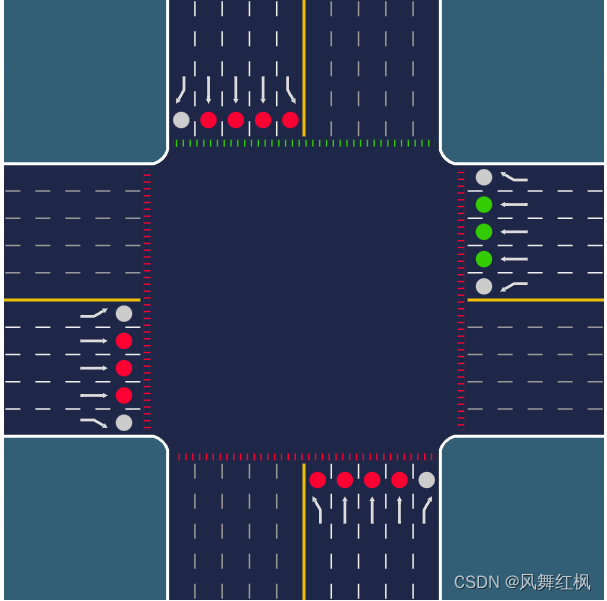
系列文章 canvas绘制红绿灯路口(一) 无图不欢,先上图 优化项: 一:加入人行道红绿信号 二:加入专用车道标识(无方向标识时采用专用车道标识) 三:东南西北四项路口优化绘制逻辑,美化图像 四:加入拖拽、缩放图例 使用方法(以vue3为例) <template><canvas class="lane" ref="laneCanvas" /></template><script se

易语言-红绿灯项目教程展示
.版本 2.支持库 iext.程序集 窗口程序集_启动窗口.子程序 _红灯_被选择外形框1.填充颜色 = #红色外形框2.填充颜色 = #灰色外形框3.填充颜色 = #灰色.子程序 _黄灯_被选择外形框1.填充颜色 = #灰色外形框2.填充颜色 = #灰色外形框3.填充颜色 = #黄色.子程序 _绿灯_被选择外形框1.填充颜色 = #灰色外形框2.填充颜色 = #绿色外形框3.填充颜


基于51单片机的红绿灯设计
寒假项目最后一个,基于STC/AT89C51的红路灯设计 实现十效果具体为:南北通行42秒,南北闪烁3秒,南北黄灯4秒,禁止通行1秒,东西黄灯4秒,东西通行27秒,东西闪烁3秒,东西黄灯4秒。同时具备特殊放行模式:南北自由通行;东西自由通行;全部禁行。所有时间可以修改。貌似和平时的红路灯不一样,但是由于想凑齐八个状态,就整了这神奇的控制步骤。黄灯多,安全第一!! 原理图: 本来是想设计一个蓝牙

基于51单片机交通灯设计时间可设置仿真红绿灯十字路口
演示视频:https://www.bilibili.com/video/BV1Tt4y1y7s8/ 将链接复制至IE浏览器打开!!! 功能操作说明: 从上到下,设置键,加键,减键,特殊键。单独一个按键为单片机复位按键。 打开仿真文件开始仿真,程序开始数码管倒计时,没有按键按下程序循环运行。 1,东西方向为绿灯,行人和车辆东西方向可以同行东西绿灯时间长20s。南北方向为红灯行人车辆禁止同行时长25s

Bugku----红绿灯 wp
0x00 题目内容为一个gif的文件,然后使用2345看图王打开,并将每一帧图片都保存下来 0x01 打开文件夹之后,发现有1168张图片,其中有大概一半左右的图片为没有颜色的红绿灯,将其全部删除。0x02 删除完之后,在文件夹里面调节大小的时候,突然发现最左侧和最右侧的一列颜色都是一样的,推测最右侧的一列为空格,因为ascii128位,最左侧的为0,得出绿色为0,红色为1,留下中间的7列。 0

山东领军红绿灯软件对接tcp
此次测试的设备属于网口设备 1.下载文件,并根据自己电脑位数安装程序。 2.这是打开页面: 3.每个红绿灯都需要对应某台工控机 这块需要设定目标的ip,就是你自己这个音响被哪台工控机调用,默认获取本地ip 注意: 工作模式 3.点击设备管理查看设备是否上线。 8.基本设置完成,这时候可以根据接口去控制红绿灯了。 9.代码```c#using GodSharp;using Sys

基于Yolov5 的红绿灯识别
目录 项目简介 数据集的标注 模型训练 小结 项目简介 基于YOLO的红绿灯识别是一种计算机视觉技术,用于识别交通图像中的红绿灯状态。该技术利用了目标检测算法,特别是YOLO(You Only Look Once)算法,来快速准确地检测图像中的红绿灯区域,并对其状态进行分类。基于YOLO的红绿灯识别在智能交通系统、自动驾驶等领域具有重要的应用价值 数据集的标注 数据集标注可

极客大讲堂:手把手教你用树莓派控制红绿灯
极客大讲堂:手把手教你用树莓派控制红绿灯 涉及硬件:树莓派以及相关套件、LED红绿灯 涉及知识:电路实验板、CanaKit 当准备好以上,我们就可以开始啦。使用树莓派进行LED原型控制。 首先要明白的是,接入所有的电线、电阻器以及工具包附带的指示灯需要谨慎操作,毕竟如果你设置操作不当将有可能损坏你的硬件。 为了简化与树莓派和LED的接触,也为了方便编写控制代码,我决定编写一个叫做Pi交通灯
js第6章BOM案例:打开和关闭窗口、窗口位置和大小、计数器、更改URL、获取URL参数、历史记录跳转、navigator对象和screen对象、红绿灯倒计时
目录 1.打开和关闭窗口 弹出对话框和窗口相关的属性和方法 弹出对话框和窗口——open()方法 name可选值 specs可选值 2.窗口位置和大小 3.计数器 4.更改URL 5.获取URL参数 6.历史记录跳转 history对象的属性和方法 无刷新更改URL地址 7. navigator对象和screen对象 8.红绿灯倒计时。 1.打开和关

基于opencv的红绿灯检测(python)
基于opencv的红绿灯检测(python) 目录 基于opencv的红绿灯检测(python) 背景 1、导入相关库 2、数据集的准备与读取 3、数据可视化 3、图像标准化输入和输出 4、代码测试 5、进行图像特征提取 6、选择图像进行测试 7、验证测试集图像准确率 致谢 背景 交通信号灯的检测与识别是无人驾驶与辅助驾驶必不可少的一部分,其识别精度直接关乎智能

一起玩儿Proteus仿真(C51)——06. 红绿灯仿真(二)
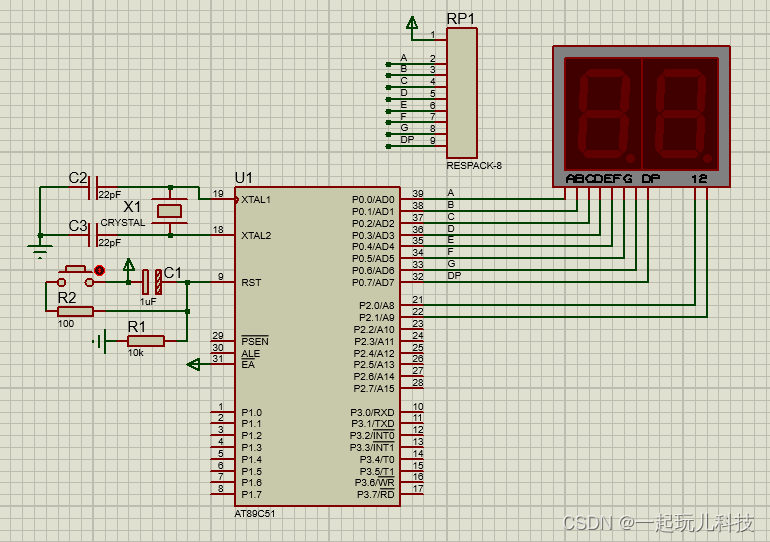
摘要:本文介绍如何仿真红绿灯 今天来看一下红绿灯仿真程序的具体实现方法。先来看一下整个程序的原理图。 在这个红绿灯仿真实验中,每个路口需要控制的设备是2位数码管显示倒计时以及红黄绿灯的亮灭。先来看一下数码管的连接方法。 数码管的8根LED显示引脚都连接到了一起,使用了一组单片机端口。另外的公共端则由单片机引脚来单独的控制。这样,在程序中通过数码管公共端引脚循环控制数码管点亮。 下面就来
一起玩儿Proteus仿真(C51)——05. 红绿灯仿真(一)
摘要:本文介绍如何仿真红绿灯 今天来做一个红绿灯仿真的程序,这个程序主要包括一下这些功能: 模拟的路口为十字交叉路口,假设东西和南北方向都是双向行驶,因此需要设置4组红绿灯和4个倒计时显示屏。倒计时时间最长为99秒,可以使用2位数码管。用按键可以单独调整东西和南北方向的绿灯时间。黄灯的时长默认为3秒。红灯的倒计时时间为另一方向的绿灯时间加上黄灯的时间。 下面就来做一个简单的仿真程序。在进
使用TensorFlow Object Detection API进行红绿灯检测
项目目录结构 本文中未明确说明的情况下,所使用的路径均在./research目录下。 research object detectiondatasets my_traffic_light (参照Pascal VOC目录结构) AnnotationsImageSetsJPEGImagesSegmentationClassSegmentationObjecttfrecord ***.tfrecor

交通灯图像VGA显示DE1-SoC开发板红绿灯VHDL代码下载及设计报告
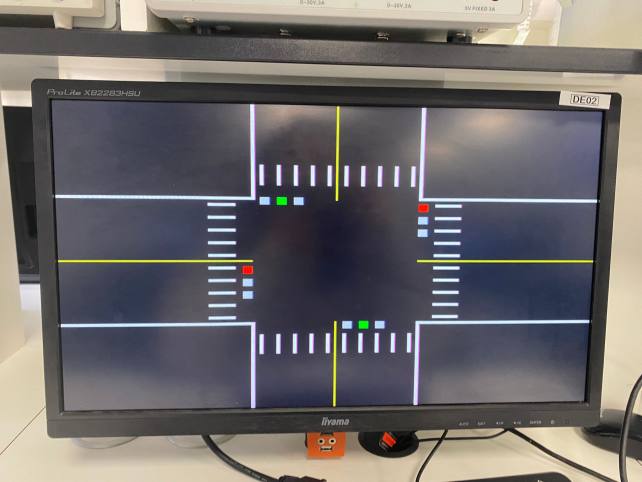
名称:交通灯图像VGA显示DE1-SoC开发板红绿灯数码管显示倒计时 软件:Quartus II 语言:VHDL 代码功能: 本设计使用VHDL语言设计VGA显示的交通灯,VGA显示屏上显示主干道和支干道,道路用白色线条描绘,每个道路中间用黄色线条隔开分为左右两个车道。每条主干道和支干道都对应有3个红绿灯,分别为红色、黄色、绿色。红黄绿三色交通灯指挥车辆的通行,红灯停,绿灯行,黄灯为绿灯到

OpenCV 360度行车辅助系统——红绿灯智能预判
AI学习红绿灯 此功能仅限前置摄像头。当视频刚开始播放时,通过自研AI算法学习红绿像素高频出现的位置,学习结束后根据学习结果判断是否使用AI红绿灯 区域,并在接下来的视频部分针对区域进行红绿灯识别。 检测到红灯则在视频底端显示“Red”字样,检测到绿灯则在视频底端显示“Green”字样。 1、收集前5%帧的红绿色素点 2、按照坐标大小排序,删掉前后10%,删掉
基于STM32交通红绿灯的论文
标题:基于STM32微控制器的智能交通信号灯控制系统设计与实现 摘要: 本文探讨了一种采用STM32系列单片机作为核心处理器,设计并实现的智能交通信号灯控制系统。系统能够根据实际交通流量自动调整红绿灯时序,同时具备远程监控、故障报警及紧急优先通行等功能。研究内容包括硬件结构设计、软件程序开发以及系统性能评估。 一、引言 阐述了城市交通拥堵问题和传统固定时序信号灯的局限性,介绍了STM32微控制

高德打车引入“红绿灯倒计时”能力,算力技术升级打车体验
打到的车还有多久能到?接驾车辆原地不动是什么原因?乘客在打车时,常常因为无法了解实时接驾路况,容易出现“等车焦虑”。 如今,高德打车已全面应用“红绿灯倒计时”能力,让乘客在等车时就能掌握接驾路况,在APP上看到接驾车辆的红绿灯读秒情况,实现“等车读秒”,从而更精准地了解自己的等车时间。 目前,高德打车在全国所有城市均支持乘客“等车读秒”。 红绿灯倒计时,实时读秒缓解“等车
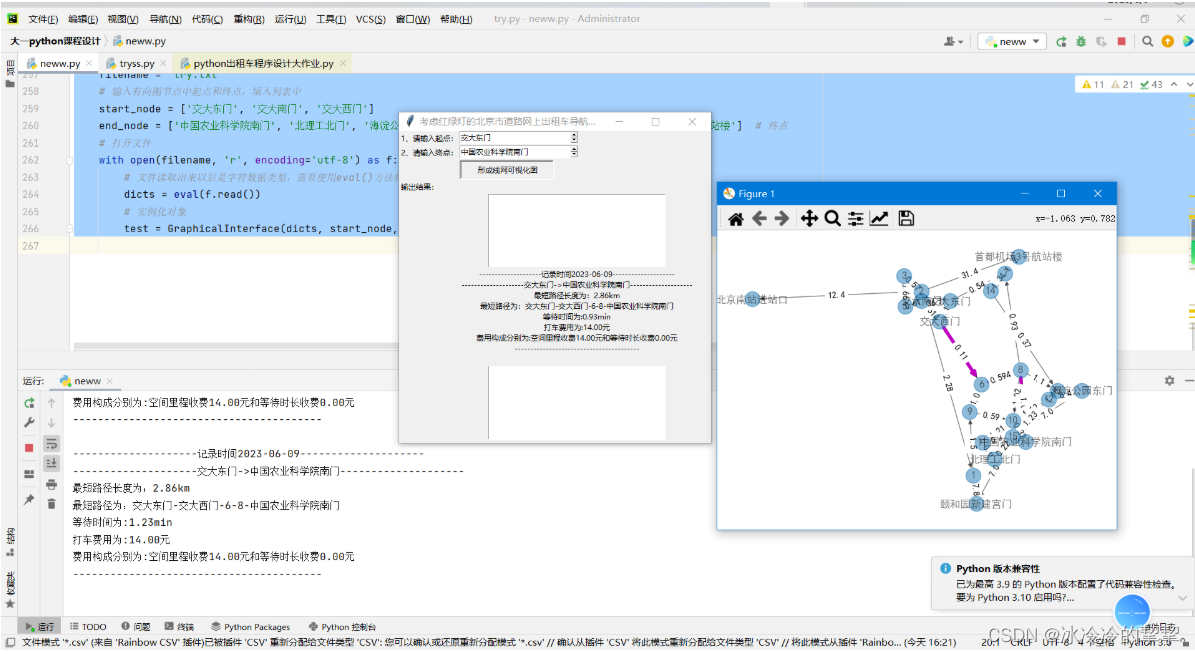
北京交通大学Python课程设计大作业(一)——考虑红绿灯的北京市道路网上出租车导航及计费
文章目录 北京交通大学Python课程设计大作业(一)——**考虑红绿灯的北京市道路网上出租车导航及计费**一、课程设计目的二、课程设计任务要求三、方案一(基于实验五)结果展示(未作可视化及图形界面交互) 四、基于Floyd算法可视化运行效果展示 五、基于Dijkstra算法可视化运行效果展示 六、总结体会感悟 北京交通大学Python课程设计大作业(一)——考虑红绿灯的北京市道

智能人行横道 是斑马线也是红绿灯
前不久,英国研发出一条高科技智能人行横道,目前正在伦敦某一公路路段进行测试。这条智能人行横道相当于在公路上铺上了长达22米的LED面板,面板能防水还可感知压力,能识别是否有行人或车辆在通行,红绿灯和斑马线的功能都归纳到这块面板上了。 首先,智能人行横道遵循“以人为先”原则。在没人过马路时,这条智能人行横道是看不见的,而一旦有行人接近路口,LED面板就会亮起来,马上显示出斑马线。
![[修订版][工控]SIEMENS S7-200 控制交通红绿灯程序编写与分析](https://img-blog.csdnimg.cn/c083578db624468cb4d51463b8aeb5e8.png)
[修订版][工控]SIEMENS S7-200 控制交通红绿灯程序编写与分析
下载地址==>https://github.com/MartinxMax/Siemens_S7-200_Traffic_Light 特别鸣谢接线过程实验目的题目要求I/O分配公式公式套用示例 程序分析分割块[不是必要的,自己分析用]左侧梯形图 [B1-B5]B1 [东西绿灯亮25s]B2 + B3 = B23 [东西绿灯闪烁3s]B4 [东西黄灯亮2s]B5 [东西红灯亮30s] 右侧梯形图

Kinect体感互动解决方案——体感红绿灯模拟
真实模拟实际交通红绿灯场景,将行人过马路过程虚拟化,使用真实红绿灯器材,并以声光电设备模拟过马路场景。当行人闯红灯时画面出现虚拟车祸现场,会有车辆驶来撞倒闯红灯的行人,发生车祸,同时配有逼真音效。以警示行人红绿灯作用以及闯红灯造成不良后果,倡导文明交通。 系统特点: 1、灵活性强:体验者不用佩戴任何感应设施。 2、操作简单:极简式安装拆卸,节省时间精力、简化繁琐流程。 http://www

【OpenCV】C++红绿灯轮廓识别+ROS话题实现
目录 前言 一、背景知识 Opencv轮廓检测 ROS相关知识 二、环境依赖 三、具体实现 Step1:初始化ROS,订阅话题 Step2:接收话题,进入回调 1. 帧处理 2. 膨胀腐蚀处理 Step3:红绿特征处理 1. 提取绘制轮廓 2. 转换矩形、排序 3. 显示检测结果 四、完整代码 五、使用方法 CMakeLists.txt package.xm