纠偏专题

坐标纠偏和正/逆地理编码
1.地理坐标系 经纬线是地球表面上两组正交(相交为90度)的曲线,这两组正交曲线构成的坐标,称为地理坐标系。 无偏的地理坐标系,即GPS坐标系。GPS坐标形式,度分秒。 2.火星坐标(GCJ-02) GCJ-02,又称“火星坐标”,国内出版的各种地图产品,必须至少采用火星坐标对地理位置进行首次加密。 GCJ-O2是国内最广泛使用的坐标体系,腾讯,高德都在用这个坐标体系。 3.其
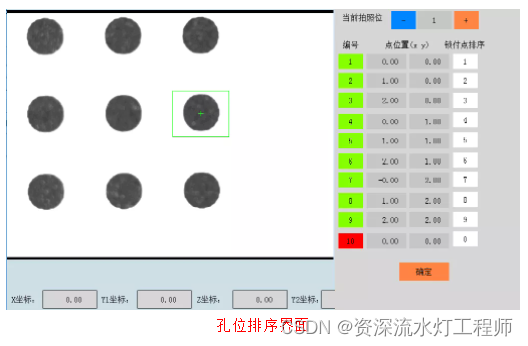
正运动控制器:视觉纠偏和找孔
一、用户主界面CCD参数设置 通过主界面CCD参数设置,学习如何操作计算相机中心与电批中心的偏移量,以及相机标定的功能。 1、相机中心与电批中心的偏移量计算 1.1、在用户主界面点击CCD参数按钮,进入CCD设置界面。 主界面 CCD参数设置界面 1.2、在CCD参数设置界面顶部区域设置相机相关参数。 如上图所示,可以知道当前扫描的相机厂商和相机曝光情况
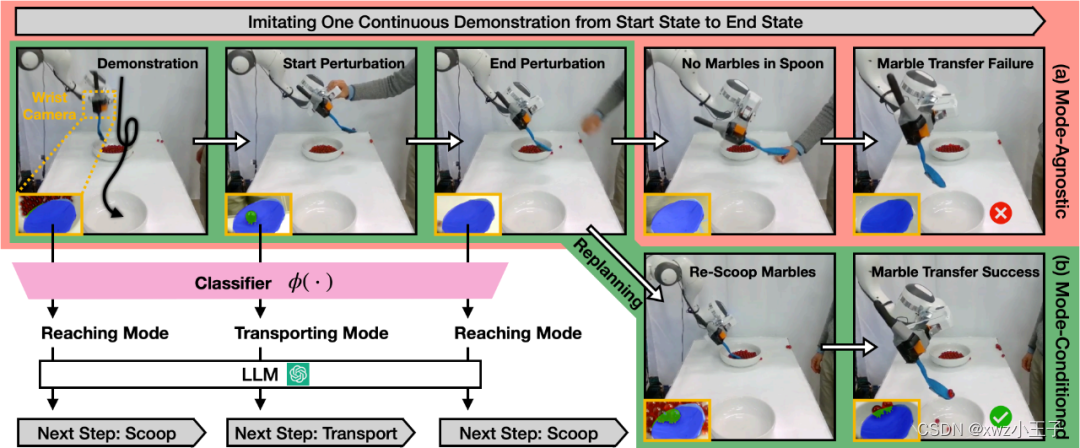
MIT最新研究成果 机器人能够从错误中纠偏 无需编程介入和重复演示
目前科学家们正在努力让机器人变得更加智能,教会他们完成诸如擦拭桌面,端盘子等复杂技能。以往机器人要在非结构化环境执行这样的任务,需要依靠固定编程进行,缺乏场景通用性,而现在机器人的学习过程主要在于模仿,即通过观看人类的演示,录入到程序当中进行训练,进而掌握和人类相同的运动技能。 事实上,机器人应该是一个出色的模仿者。但如果工程师未对机器人进行编程,使其适应各种可能的碰撞与轻微推动,则机器人在处理

百度坐标、火星坐标与WGS-84坐标转换(纠偏加偏)工具及其开发思路
一、杂言 百度坐标(BD-09)、火星坐标(GCJ-02)坐标与WGS-84坐标相关说明这里不再赘述,其他博客文章对于三类坐标系的说明已经比较详细,可以自行搜索了解,本篇文章主要对本人开发的各类转换工具进行说明(注:本人主要使用Python脚本进行开发)。文章末会将工具下载链接附上,工具为我在读研期间学习与实践的成果,可以提供数据服务,请尊重知识成果,欢迎提供意见或建议。转换源码为GitHub开
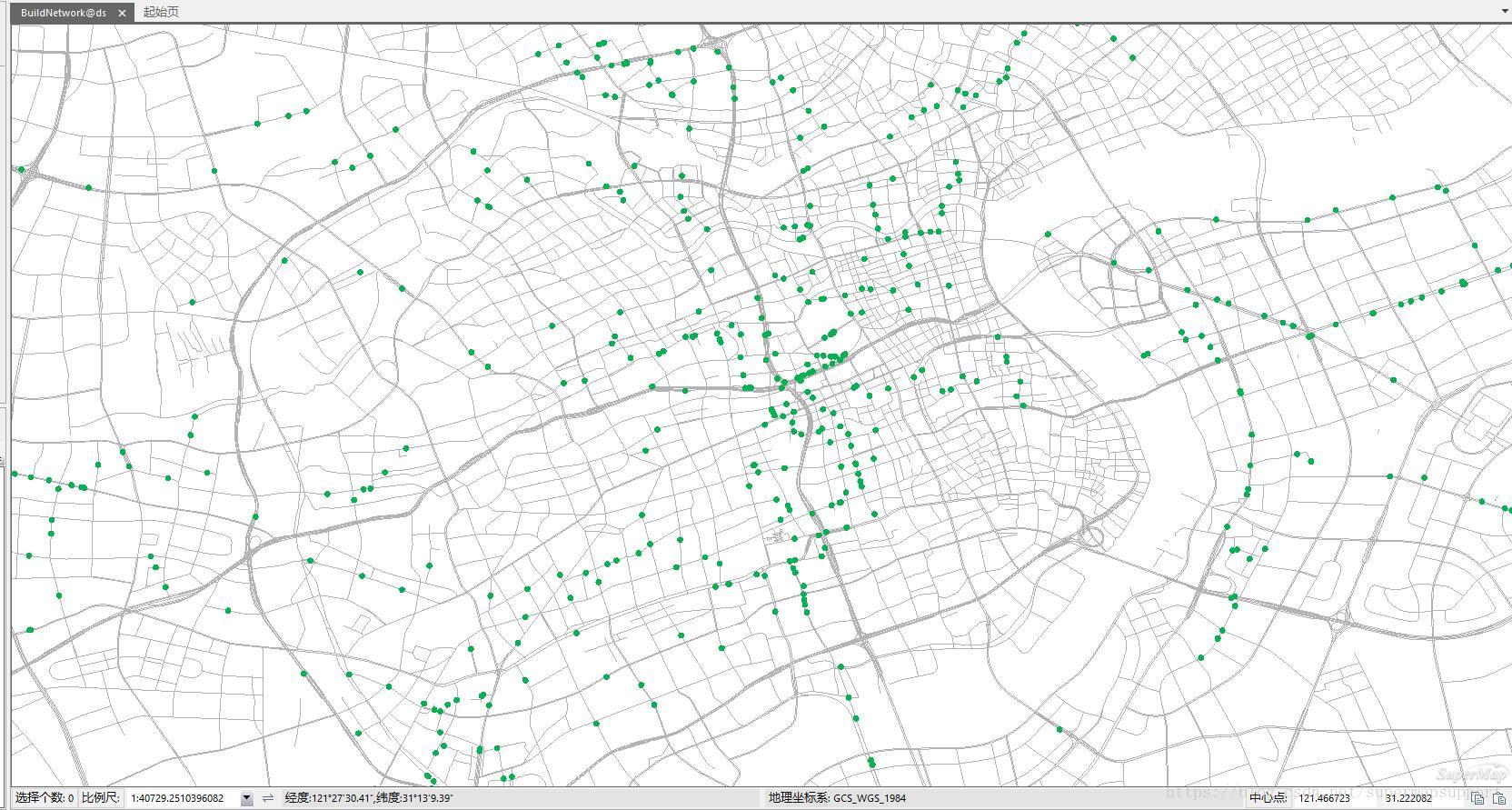
用java组件纠偏出租车gps采集点
用Java组件对出租车GPS采集点进行纠偏 随着技术发展,如今对出租车的运营管理也非常精准,运营公司后台通过实时接收出租车的位置信息,对出租车进行运营调度及安全管理。在位置信息数据的处理方面就离不开gis数据基础处理功能与空间分析功能。本文对位置数据的前期预处理做一个详细的讲解。 数据准备: 原始上海出租车位置信息数据Taxi_105作为示例,依次为出租车id,采集时间,经度,纬度,速度,

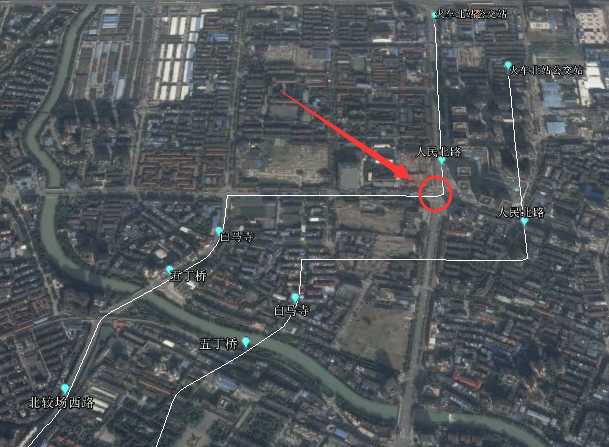
ARCGIS对谷歌影像进行投影转换、影像拉伸纠偏处理及倾斜摄影纠偏
相信有不少同学会有这样的困扰,通过软件下载的谷歌遥感影像,直接用ARCGIS等专业软件打开之后发现,遥感影像有拉伸的情况,这是什么原因呢。那是因为,通过软件下载下来的遥感影像的投影信息包含的是经纬度信息,而在ARCGIS等专业软件默认的投影信息包含的是坐标信息,如果不将经纬度转换成坐标,自然会出现拉伸的情况。本帖针对这一情况来告诉同学们如何进行经纬度与坐标之间的转换以消除其带来的拉伸影响。 本

关于openlayers引入高德地图出现坐标偏移的纠偏方法
之前通过openlayers成功将百度,高德地图引入系统,但是由于百度是BD-09坐标,高德是GCJ-02坐标系,所以当用WGS-84的坐标建立点,线,面时,这些要素就无法显示在正确的位置上,当然,这时候我们可以通过网上提供的坐标转换公式,对传过来的坐标进行转换,从而适应不同的地图,但是这种方法比较麻烦,每次都要转换,而且当要切换两种地图时候,还要对地图要素进行重新创建,所以一劳永逸的方法是对地图

PG-300D60W260ARA中间导向纠偏一体机
PG-200D50W230ARO、PG-250D50W230ALA、PG-300D60W260ARA、PG-400D60W320ALO、PG-450D60W320ARM、PG-500D60W320ALO、PG-550D60W320ARM、PG-600D60W320ARA中间导向纠偏一体机功能特点: 1、无刷伺服电机驱动,免维护 2、精密滚珠丝杠,定位准确 3、导向行程大 4、可定制
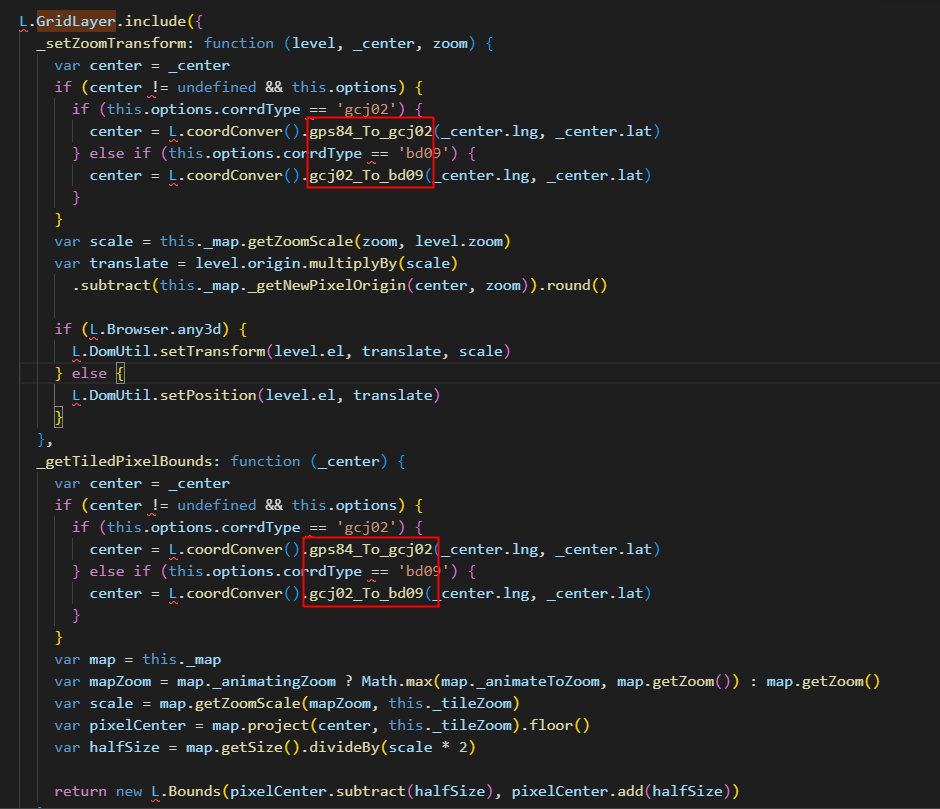
leaflet 地图纠偏
背景: 手头项目需要使用到百度地图进行设备数据展示,设备坐标属高德坐标系,结合小组原有组件,拟初步技术方案: 地图方面:利用leaflet配合leaflet.chinatmsproviders插件,加载百度地图瓦片来实现需求(还可以加载其他地图瓦片,如高德,天地图,谷歌等); 设备坐标方面:原设备坐标是高德坐标(火星坐标系),通过后端转换成百度坐标(百度坐标系)给到前端渲染。 结果:设备位
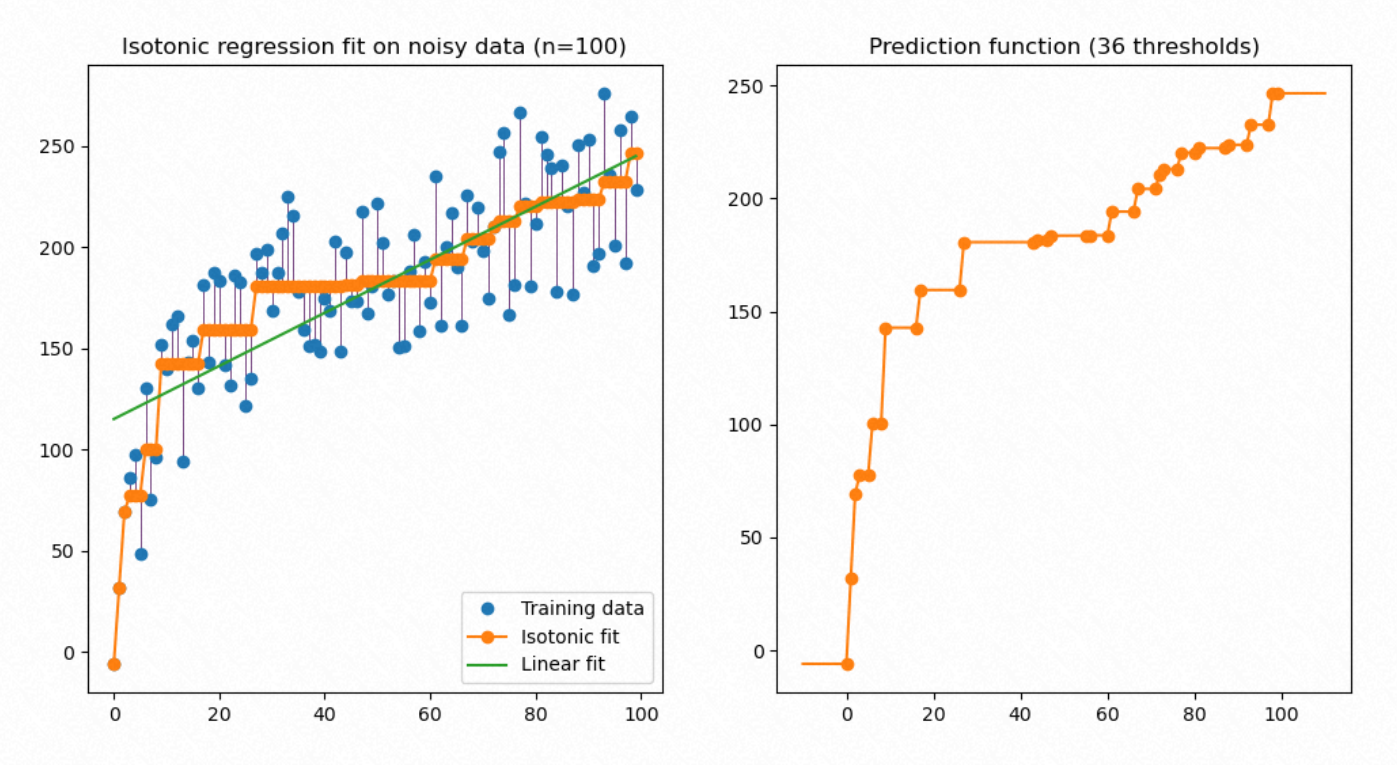
ctr 校准纠偏,保序回归
此文尚未完成. 背景 模型预测的 ctr 并不一定总是准的, 若只关注 auc 指标, 难以反映业务价值. 场景一: 广告出价 排序表达式是 final_score = ctr * bid_price. ABC三条广告, A的实际点击率是10%,B的实际点击率是5%,C的实际点击率是1%,但是A B C的点击收益分别是2,5,10。 如果我们的模型只保序、没有做到保距,那么输出的预估值是5
钢带EPC纠偏比例伺服液压站比例伺服阀控制器
钢带EPC纠偏比例伺服液压站是一种专门用于卷取机的自动化设备,主要目标是确保钢带的一侧边缘保持平直,从而避免在后续运输和处理过程中损坏带钢的边缘。这种系统主要应用于钢铁、橡胶、造纸等行业的非透明带材连续生产线上。 该系统主要由液压源、电液伺服阀、放大器、伺服液压缸、卷筒和位置检测传感器等部件组成。整个液压伺服系统是一个单位负反馈系统。此外,它还包括光电探测装置、EMV控制箱及操作盘、液压

解决Adobe Acrobat “正在纠偏图像,正在旋转图像,正在分解页面”问题
笔者最近遇到的一个问题:用acrobat Pro X 打开pdf显示“正在纠偏图像,正在旋转图像,正在分解页面”,此时acrobat没有响应,要等待其完成,出现就得等一会儿,总出现,总得停顿,看一篇文献很烦。 解决方法一: 编辑—首选项—朗读—屏幕阅读器选项—页面与文档 下拉菜单里选择阅读整个文档。确定即可。 备注:发现此法不能解决最开始的那次“正在……”。 解决方法二: 先关闭Ado

民用地图经纬度纠偏-高德系地图纠偏
民用地图经纬度纠偏-高德系地图纠偏 发表于:2012年06月20日 13:51 0 Autonavi,高德系地图(google地图、mapabc地图、腾讯的soso地图等,在地图下方有?autonavi.?mapabc 版权信息的) 高德为互联网/移动互联网用户和网站提供互联网地图(Mapabc.com)服务、地图API服务及基础地图服务。目前,MapABC地图网站已经

板带偏移式双辊架纠偏比例阀放大器
板带偏移式双辊架纠偏是一种常见的板带跑偏控制技术,它主要通过调整纠偏辊的位置来实现对板带的横向位置控制。理想的纠偏辊和排列状况是完好接触且无任何几何变形,同时板带在运行过程中也不允许有横向移动。然而,在实际生产过程中,由于各辊之间可能没有很好的排列,或者板带有一些变形,这会导致板带发生横向偏移,因此需要使用纠偏系统进行纠正。

对中纠偏系统比例伺服阀放大器
对中纠偏系统是一种广泛应用于生产线上的技术设备,主要用于调整材料的运动轨迹,使其在生产过程中能够准确对中。纠偏系统可以显著提高生产效率和产品质量,广泛应用在钢铁、瓦楞纸、纺织、印刷、标签、贴标、造纸、塑料薄膜等多个行业。 纠偏系统的工作原理通常是:首先,纠偏传感器会监测材料的边缘位置,将检测到的实际位置与设定位置进行比较,计算出偏差量。然后,纠偏系统会将这些偏差量转换成电信号,输出给控制器。
AI的“色差”与“纠偏”
来源:脑极体 在美国学术界声援BLM(Black Lives Matter)之后,事情的走向有点难以预料。 学术界的反种族歧视反省似乎没有了下文,但是如火如荼的BLM运动早已蔓延开来,这次将矛头指向了AI界。 事情的起因是杜克大学提出了一种称之为PULSE(Photo Upsampling via Latent Space Exploration)的AI算法。它可以轻松将马赛克级别画质的人脸图

CANopen转ProfiNet网关在大跨径门机起重设备同步纠偏控制应用案例
大型门机起重设备纠偏控制系统采用CanOpen通讯协议,而PLC使用的是ProfiNet协议,看似不兼容的两种协议如何实现互通?今天我们来看一下这个案例。 通过捷米特JM-COP-PN设置纠偏系统的参数,同时采集门机左右双轨的轮子多点同步控制,速度、位置等信息。在经过简单的配置后,用户可以很轻松的完成CanOpen转ProfiNet的协议转换,在ProfiNet总线协议下读写CanO