简记专题

第八章 软件测试简记
第八章 软件测试 软件测试:在软件投入运行前对软件需求分析、软件设计规格说明和软件编码进行差错和纠正。 软件测试的目标: 1.用最少的人力、时间找出软件潜在的各种错误和缺陷; 2.能够确认软件实现的功能和用户需求上是一样的; 3.能够收集到足够的测试结果为软件可靠性提供依据; 软件测试的任务:根据软件开发各个阶段的文档资料和程序的内部结构,精心设计
第六章 详细设计简记
第六章 详细设计 详细设计不是具体的编程,而是要设计出程序的“蓝图”,详细设计不仅仅是逻辑上正确的实现每个模块的功能,更重要的是设计出来的处理工程应该简明易懂。 详细设计的目的:为软件结构图中的每一个模块确定使用的算法和块内的数据结构,并用某种选定的表达工具给出清晰的描述。 详细设计的任务: 1.为每

第三章 需求工程简记
第三章 需求工程 软件需求的定义: (1)用户解决问题或达到目标所需条件或能力。 (2)系统或系统部件要满足合同、标准、规范或其它正式规定文档所需具有的条件或权能。 (3)一种反映上面(1)或(2)所述条件或权能的文档说明。 软件需求包括三个不同的层次:业务需求、用户需求和功能需求—也包括非功能需求。 1.业务需求( business re

第二章 可行性研究与软件开发计划简记
第二章 可行性研究与软件开发计划 可行性研究的任务:回答所开发的软件系统有无可行的解决办法或者这个系统值得开发么。 可行性研究大体可分为三个大的方面:工艺技术、市场需求、财务经济状况。 可行性研究的目的:就是尽可能的用最小的代价在尽可能短的时间内确定问题是否能解决。 可行性研究的解决方案:一般集中在 1.技术可行性2.经济可行性3.操作可行性。
第一章 软件工程的概述简记
第一章 软件工程的概述 *软件的概念:软件(Software)是一系列按照特定顺序组织的计算机数据和指令的集合。 软件的分类:(5大类) *1.基于软件功能划分 1)系统软件
第五章 中央处理器笔记简记
第五章 中央处理器 1.CPU的功能:指令控制、操作控制、时间控制、数据加工。 2.CPU的基本组成: 控制器功能: 1)、从指令cache中取出一条指令,并指出下一条指令在指令cache中 的位置 2)、对指令进行译码或测试,并产生相应的操作控制信号,以便启动规定的动作。 运算器功能: 1)、执行所有的算数运算
第三章 多层次的存储器笔记简记
第三章 多层次的存储器 1.存储器的分类 存储器分类标准: (1)存储介质:半导体存储器和磁表面存储器;(按存储介质) (2)存取方式:随机存储器和顺序存储器;(按存取方式) (3)存储内容可变性:只读存储器和随机读写存储器;(按读写功能) (4)信息易失性:易失性存储器和非易失性存储器;(按信息的可保存性) (5)系统中的作用:可分为内部存储器和外


Segmentation简记-Multi-stream CNN based Video Semantic Segmentation for Automated Driving
创新点 1.RFCN & MSFCN 总结 网络结构如图所示。输入视频得到图像分割结果。 简单粗暴

Detection简记3-Region Proposal by Guided Anchoring
创新点 1.新的anchor 分布策略:Guided Anchoring 2.feature adaption module,根据潜在的anchor精调特征 总结 Guided Anchoring:流程如图所示 特征图F1接两个分支:位置预测分支产生物体可能存在的位置的概率图,形状预测分支预测物体的形状,独立于位置。根据两个分支的输出,得到anchor。 位置预测分支: 1X1的卷积+si

Attribute Recognition简记1-Video-Based Pedestrian Attribute Recognition
创新点 1.行人属性库 2.行人属性识别的RNN框架及其池化策略 总结 先看看行人属性识别RNN结构: backbone是ResNet50,输出是每一帧的空间特征。这组特征被送到两个分支,分别是空间池化和时间建模。最后两种特征拼接。然后分类(FC)。 LSTM关注帧间变化。受cvpr《Recurrent Convolutional Network for Video-Based Person

Segmentation简记5-AuxNet: Auxiliary tasks enhanced Semantic Segmentation for Automated Driving
创新点 1.分割网络为主任务,深度估计网络为辅任务 2.loss的设计 总结如图所示 网络结构如图所示 其实很容易理解。 backbone是基于ResNet50 分割网络是基于FCN8 深度估计网络与分割网络类似,最后一层是回归深度层。 最有意思的是两种任务的loss的合并。 分割的loss很常见:cross entropy 深度loss:mean absolute error 算法一:

Face Recognition简记1-A Performance Comparison of Loss Functions for Deep Face Recognition
创新点 1.各种loss的比较 总结 很久没见到这么专业的比较了,好高兴。 好像印证了一句话,没有免费的午餐。。。。 ArcFace 和 Angular Margin Softmax是性能比较突出的

Detection简记2-DAFE-FD: Density Aware Feature Enrichment for Face Detection
创新点 1.使用密度估计模型增强检测中的特征图 总结 整个流程还是很清晰的。 conv1-3的特征图经过密度估计模块由检测器D1进行检测。 D2-4分别是四个检测器。 FFM是特征融合模块,将不同层不同大小的特征融合。 FFM网络结构如下: 首先使用1X1的卷积减少两组特征的厚度到128,然后使用双线性插值统一两组特征图的尺寸,然后相加。类似于cvpr2017的SSH。 多尺度检测器的网

DS简记1-Real-time Joint Object Detection and Semantic Segmentation Network for Automated Driving
创新点 1.更小的网络,更多的类别,更复杂的实验 2. 一体化 总结 终于看到一篇检测跟踪一体化的文章 网络结构如下: ResNet10是共享的Encoder,yolov2 是检测的Deconder,FCN8 是分割的Deconder。 其实很简单,论文作者也指出:Our work is closest to the recent MultiNet. We differ by focus

Segmentation简记3-UPSNet: A Unified Panoptic Segmentation Network
Segmentation简记3-UPSNet: A Unified Panoptic Segmentation Network 创新点总结实验 创新点 1.统一的全景分割网络 总结 uber的作品 网络结构如下: 还是比较简洁的。 Backbone 采用了原始mask rcnn。 Instance Segmentation Head 使用了最大的特征图,包括bbox回归,分

Segmentation简记2-RESIDUAL PYRAMID FCN FOR ROBUST FOLLICLE SEGMENTATION
创新点 与resnet结合,五层/level的分割由此带来的梯度更新问题,设计了两种方案。 总结 有点意思。看图吧,很明了。 细节图: 全流程图: 实验 Res-Seg-Net-horz: 在UNet上堆叠5个细节图中的结构,没有上采样层。 Res-Seg-Net-non-fixed: 普通方式的更新 Res-Seg-Net-fixed: 每一层的更新,只依据距离它最近的一
python数组列表操作简记二
python数组列表操作简记二 一、列表配对组合为新列表或字典1.1多个列表配对组合为新列表1.2两个列表配对转换为字典 二、数组加减乘除运算2.1一维数组加减除运算2.2一维数组乘法运算 三、数组切片读取3.1一维数组切片读取3.2二维数组切片读取3.3三维数组切片读取 四、数组简单筛选4.1筛选数组中满足指定条件的元素4.2筛选数组中最大最小元素及索引 五、数组其他操作5.1数组元素进行
python数组列表操作简记
python数组列表操作简记 一、python列表、数组增删元素1.1列表增删元素1.2数组增删元素1.2.1array数组1.2.2numpy数组 二、python列表、数组排序2.1列表排序2.1.1数值类型或无数字字符串类型2.1.2数字和字母组成的字符串类型2.1.3多字段类型 2.2数组排序2.2.1array数组2.2.2numpy数组 三、python列表、数组转换维度3.
addEventListener(event, function, useCapture) 简记
监听事件方法:addEventListener(<event-name>, <callback>, <use-capture>) 移除监听事件方法:removeEventListener(event, function) 其中 addEventListener(event, function, useCapture) 有三个参数,分别代表: 第一个参数 event-name (String)

点云语义分割:论文阅读简记 -Spatial Transformer Point Convolution
[1] Spatial Transformer Point Convolution 为了满足点云置换不变性问题,以往的方法通过max或者sum来进行特征聚合,但是这种操作是各向同的,不能更好的建模局部几何结构。本文提出spatial transformer point convolution试图实现各相异性的滤波器。引入空间方向字典来捕获点云的几何结构。利用方向字典学习将无序的邻居转换成规范有序

3D 论文阅读 PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding简记
PointContrast: Unsupervised Pre-training for 3D Point Cloud Understanding 摘要PointContrast Pre-training实验结果 摘要 简单记一下Charles R. Qi的新作 PointContrast: Unsupervised Pre-training for 3D Point Clou
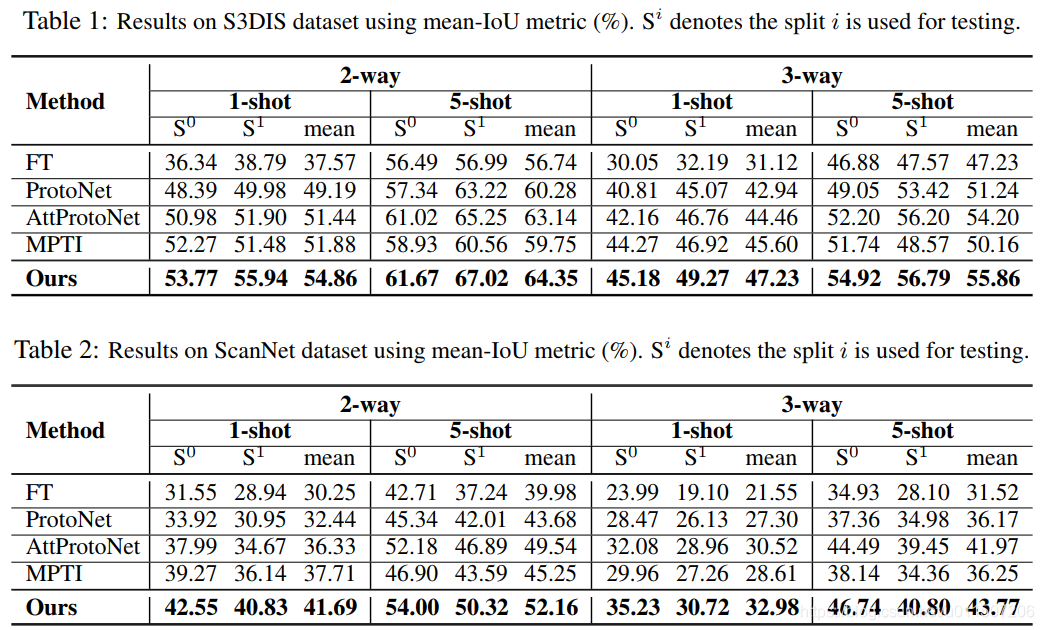
Few-shot 3D Point Cloud Semantic Segmentation 论文简记
Few-shot 3D Point Cloud Semantic Segmentation 论文简记 摘要 已有的点云语义分割方法需要大量的标签,点云逐点标记是困难的,另外对新的类别较差的泛化性。因此本文提出一个显著感知的多原型转化few-shot 分割方法。 具体地,每个类可以表示为多个原型来建模复杂分布地点云数据。然后,设计一个标签传播方法,来探索标注点和未标记点的多原型亲和度,以及未标注

1.2 QT随手简记(二)
QT学习篇2 一、QT学习方法 1. QT查询与学习资源 QT助手:学会使用QT的助手和上网查询,掌握API文档的查询与使用。QT设计师界面:通过图形界面进行组件的拖拽布局,所见即所得。 2. QT设计师界面操作 跳转与代码生成:双击.ui文件跳转到设计师界面,自动生成XML和C++代码。组件使用:拖拽组件到窗口,复制组件,设置属性。 3. 组件与类名对应规律 Display Wid