点动专题
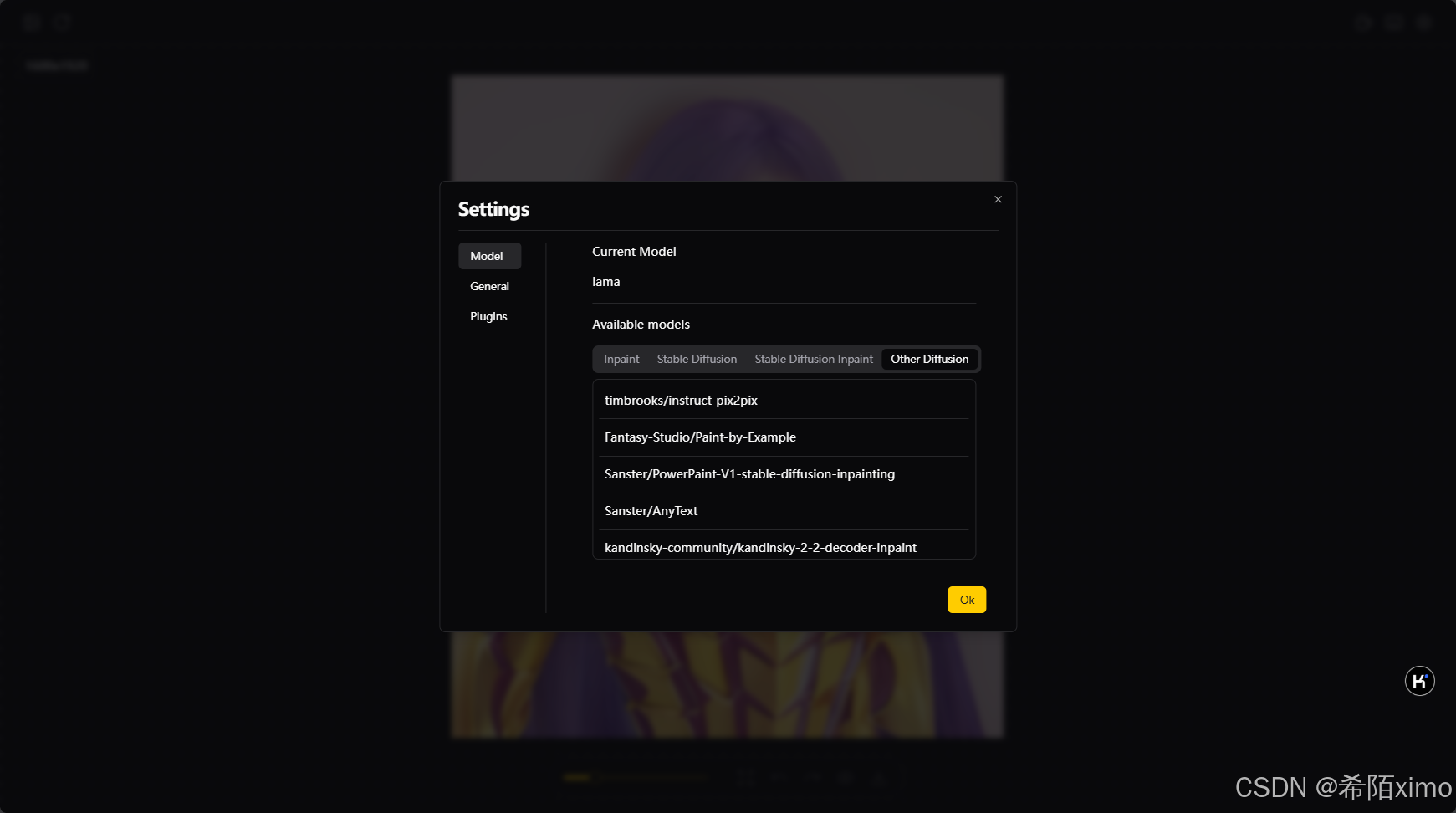
IOPaint部署,在服务器Ubuntu22.04系统下——点动科技
这里写目录标题 一、ubuntu22.04基本环境配置1.1 更换清华Ubuntu镜像源1.2 更新包列表:2. 安装英伟达显卡驱动2.1 使用wget在命令行下载驱动包2.2 更新软件列表和安装必要软件、依赖2.2 卸载原有驱动2.3 安装驱动2.4 安装CUDA2.5 环境变量配置 二、安装miniconda环境1. 下载miniconda32. 安装miniconda33. 切换

汇川AM400PLC通过EtherCAT总线控制禾川X3E伺服使能和点动控制
进行通信之前需要安装禾川X3E的XML文件,具体方法如下: 1、汇川AM400PLC和X3E通信配置 汇川AM400PLC和禾川X3E伺服EtherCAT通信-CSDN博客文章浏览阅读29次。1、汇川H5UPLC和X3E伺服EtherCAT总线控制汇川H5U PLC通过EtherCAT总线控制SV660N和X3E伺服_伺服驱动器 ethercat csdn 汇川-CSDN博客。https://
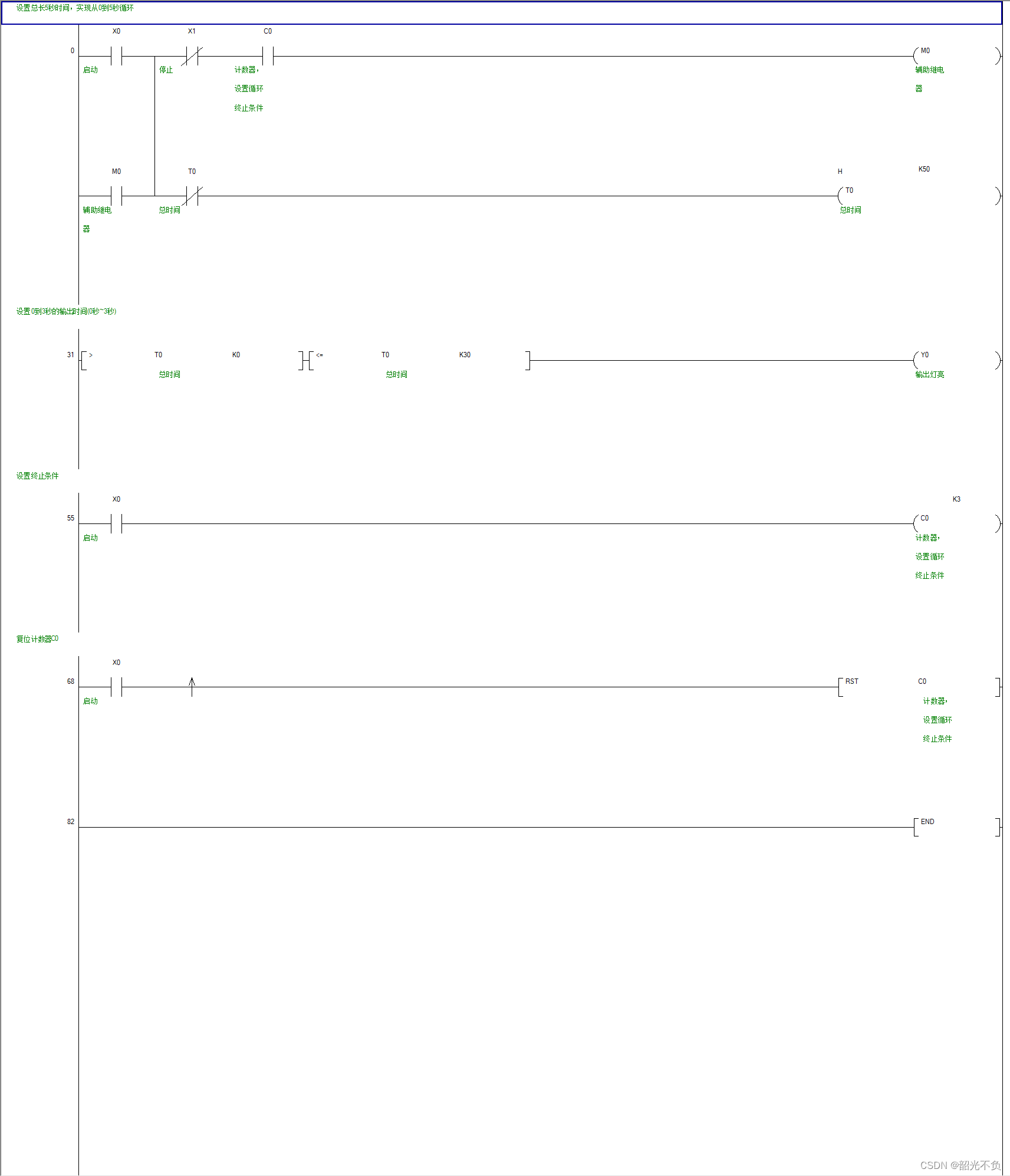
三菱plc的点动控制循环(小灯闪烁,单控气缸循环)
以为前一段时间小编做了一个气缸定时循环的程序,根据程序有不足之处,所以小编写下这篇文章,将网络上的plc小灯控制进行总结!如果对你有帮助,不要忘了点赞收藏!如果有更加好的梯形图,欢迎评论!!! 单控气缸的循环控制 x1为启动按钮,D6为循环条件,Y3为小灯或者气缸信号(不建议) 气缸循环程序 此程序有注释更加方便查看与阅读程序。(不建议) 例题:要求气缸循环伸出3
汇川PLC(H5U):伺服电机点动控制
一、基本概念理解 伺服电机旋转一圈的脉冲数 伺服电机上都装有一个编码器,这个编码器用于产生脉冲,常见伺服电机转一圈一般是产生10000个脉冲。相当于电机转360°,产生了10000个脉冲,那旋转1°就产生10000/360 = 27.7个脉冲。同理,我们用脉冲控制伺服控制器来驱动伺服电机旋转,也是需要10000个脉冲电机才转一圈,发送27.7个脉冲,电机就转1°。也可以理解为电机的旋转位置精度
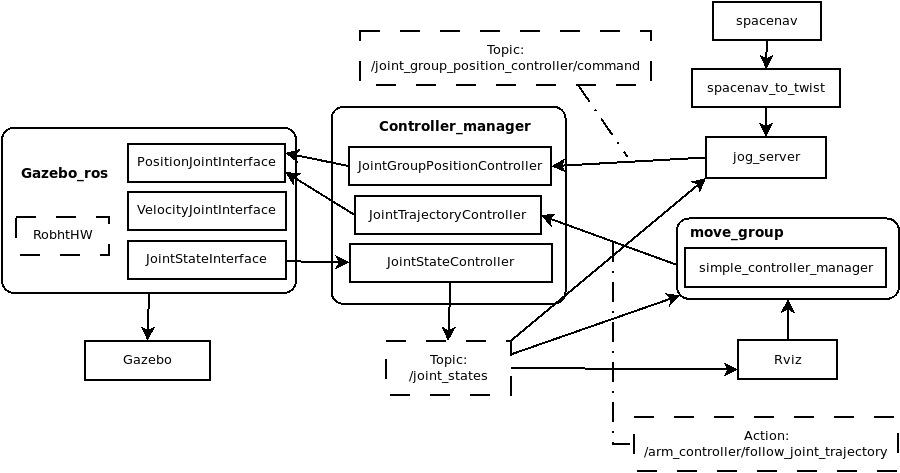
ROSMoveit中机械臂的点动(Jog)实现
文章目录 启动文件的分析ur_gazebo/ur5.launchur5_moveit_config/ur5_moveit_planning_execution.launchur5_moveit_config/moveit_rviz.launch 控制控制器的切换moveit_jog_arm/spacenav_cpp.launch手动输入jog_server的工作原理 在最新的Mo
使用STM32 再实现蓝牙/点动控制小车
小车的项目之前也已经都做过一遍了,重做一遍的目的是温习STM32学习到的知识点,加深对于不同单片机的理解。 项目需求 让小车可以通过蓝牙控制前后左右移动;或实现点动的控制前后左右移动。 硬件介绍 蓝牙模块HC-01 已经使用过无数次,不过多赘述 电机驱动模块 L9110s 用来驱动小车的两个电机 正转时:B_1A = 0; B_1B = 1; A_1A = 0; A

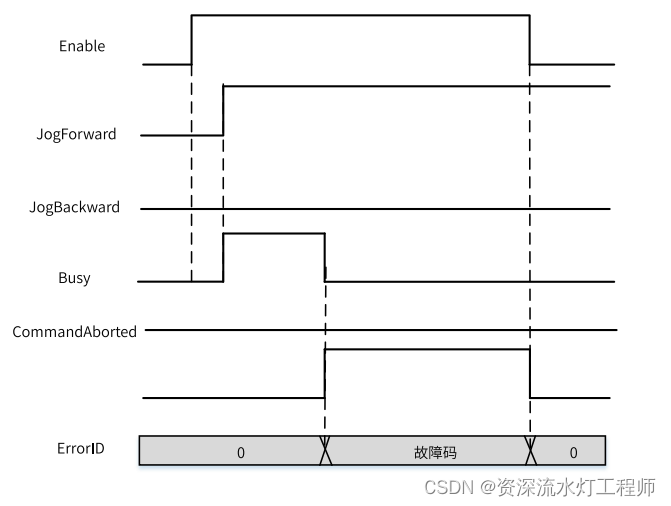
点位运动(ZeroPos) 与 JOG运动(点动) 的区别?
点位运动指: 点到点 的运动,点位运动包括绝对运动和相对运动,指令中都包含了目标位置(相对运动); JOG运动指点动:注意不是点位运动,JOG运动指令中没有目标位置,只要发出了开始运动命令,就一直运动,直到发出停止命令为止。