李宏毅专题

【深度学习详解】Task2 分段线性模型-引入深度学习 Datawhale X 李宏毅苹果书 AI夏令营
前言 《苹果书》第一章的内容包括 机器学习基础 -> 线性模型 -> 分段线性模型 -> 引入深度学习 这一篇章我们继续后续内容 ~ 其中涉及到“激活函数”的作用理解: 除了 开源项目 - 跟李宏毅学深度学习(入门) 之外, 还有 @3Blue1Brown 的神经网络 和 @StatQuest 的深度学习 视频内容辅助。 🍎 🍎 系列文章导航 【深度学习详解】Task1 机器学习基础-

Datawhale X 李宏毅苹果书 AI夏令营 - 跟李宏毅学深度学习(入门之线性模型)
文章目录 一、线性模型是什么?二、线性模型的特点三、简单举例理解3.1、预测未来某一天点击量3.2、分段线性曲线 总结 一、线性模型是什么? 在深度学习中,线性模型是一种简单但基础且广泛应用的数学模型。它的基本形式是一个线性方程,如y = wx + b,其中y是预测输出,x是输入特征,w是权重参数,b是偏置项(也称为截距)。 线性模型假设输入与输出之间存在线性关系,即输出是输

【无标题】【Datawhale X 李宏毅苹果书 AI夏令营】批量归一化
1、批量归一化的作用 批量归一化(Batch Normalization,BN)的把误差曲面变得平滑,使训练能够得到快速收敛; 训练过程的优化:使用自适应学习率等比较进阶的优化训练方法; 训练对象的优化:批量归一化可以改变误差表面,让误差表面比较不崎岖 参数 w i w_i wi是指训练参数或者训练的目标 1.1 特征归一化 当输入的特征,每一个维度的值,它的范围差距很大的时候,我们就可能

Datawhale X 李宏毅苹果书 AI夏令营-深度学习基础-Task3
# Datawhale AI 夏令营 夏令营手册:向李宏毅学深度学习 批量归一化 如果误差表面很崎岖,它比较难训练。而**批量归一化(Batch Normalization,BN)**的作用是把误差表面变得平滑,能够更好地训练。 在一个线性的的模型里面,当输入的特征,每一个维度的值,它的范围差距很大的时候,我们就可能产生像这样子的误差表面,就可能产生不同方向,斜率非常不同,坡度非常不同的误

【2024】Datawhale X 李宏毅苹果书 AI夏令营 Task3
本文是关于李宏毅苹果书”第2章 实践方法论“学习内容的记录。 模型在测试集上表现不佳,可能是因为模型没有充分学习训练集。模型不能充分学习训练集的原因: 模型偏差优化问题过拟合不匹配 一、模型偏差 模型偏差是指:由于模型过于简单,即便找到该模型的最优参数,模型的损失函数值实际还未达到最小。(想在海里捞针,但实际针不在海中) 此时可以通过重新设计模型、赋予模型更大灵活性降低模型偏差。 增加

Datawhale X 李宏毅苹果书 AI夏令营(深度学习 之 实践方法论)
1、模型偏差 模型偏差是指的是模型预测结果与真实值之间的差异,这种差异不是由随机因素引起的,而是由模型本身的局限性或训练数据的特性所导致的。 简单来讲,就是由于初期设定模型,给定的模型计算能力过弱,导致在通过梯度下降法进行优化以得到损失最小的函数过程中,模型表现太差,结果如同想要在大海里面捞针(一个损失低的函数),结果针根本就不在海里。 1.1、解决方案: 重新设计一个模型,给模型更大的

【Datawhale X 李宏毅苹果书 AI夏令营】《深度学习详解》Task3 打卡
文章目录 前言学习目标一、优化策略二、模型偏差三、优化问题三、过拟合增加训练集给模型一些限制 四、交叉验证五、不匹配总结 前言 本文是【Datawhale X 李宏毅苹果书 AI夏令营】的Task3学习笔记打卡。 学习目标 李宏毅老师对应视频课程:https://www.bilibili.com/video/BV1JA411c7VT?p=4 《深度学习详解》第二章主要介绍
Datawhale X 李宏毅苹果书 AI夏令营 入门 Task3-机器学习框架
目录 实践方法论1.模型偏差2.优化问题3.过拟合4.交叉验证5.不匹配 实践方法论 1.模型偏差 当一个模型由于其结构的限制,无法捕捉数据中的真实关系时,即使找到了最优的参数,模型的损失依然较高。可以通过增加输入特征、使用更复杂的模型结构或采用深度学习等方法来新设计模型,增加模型的灵活性。 2.优化问题 在机器学习模型训练过程中,即使模型的灵活性足够高,也可能由于优化算

Datawhale X 李宏毅苹果书 AI夏令营 进阶 Task3-批量归一化+卷积神经网络
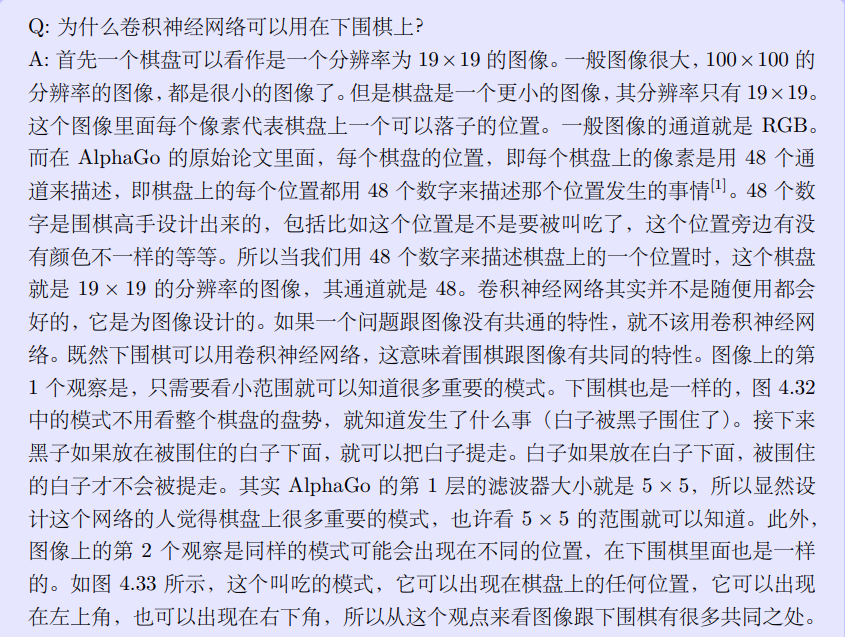
目录 1.批量归一化1.1 考虑深度学习1.2 测试时的批量归一化1.3 内部协变量偏移 2.卷积神经网络2.1 观察 1:检测模式不需要整张图像2.2 简化 1:感受野2.3 观察 2:同样的模式可能会出现在图像的不同区域2.4 简化 2:共享参数2.5 简化 1 和 2 的总结2.6 观察 3:下采样不影响模式检测2.7 简化 3:汇聚2.8 卷积神经网络的应用:下围棋 1.
卷积神经网络(Datawhale X 李宏毅苹果书AI夏令营)
卷积神经网络(Datawhale X 李宏毅苹果书AI夏令营) 卷积神经网络是一种非常典型的网络 架构,常用于图像分类等任务。 一张图像是一个三维的张量,其中一维代表图像的 宽,另外一维代表图像的高,还有一维代表图像的通道(channel)的数目 通道:彩色图像的每个像素都可以描述为红色(red)、绿色(green)、蓝色(blue)的组 合,这 3 种颜色就称为图像的 3 个色彩通道。这种

DataWhale AI夏令营-《李宏毅深度学习教程》笔记-task3
DataWhale AI夏令营-《李宏毅深度学习教程》笔记-task2 第五章 循环神经网络5.1 独热编码5.2 RNN架构5.3 其他RNN5.3.1 Elman 网络 &Jordan 网络5.3.2 双向循环神经网络 第五章 循环神经网络 循环神经网络RNN,RNN在处理序列数据和时间依赖性强的问题上具有独特的优势,尤其是在自然语言处理和时间序列预测领域。 由图可知RN
Datawhale x李宏毅苹果书AI夏令营深度学习详解入门 Task3
在深度学习中,模型偏差、优化问题和过拟合是我们经常会遇到的挑战。理解这些问题并找到合适的解决方法对于提高模型的性能至关重要。 第一章:模型偏差 1.1 模型过于简单可能导致模型偏差 在应用机器学习算法时,如果模型过于简单,就可能无法包含能够让损失变低的函数。例如,一个有未知参数的函数集合可能太小,无法涵盖最优的函数,导致即使找到了最优的参数,损失仍然不够低。

Datawhale X 李宏毅苹果书 AI夏令营 Task3打卡
实践方法论 1 模型偏差 1.1 基本概念 模型偏差(Model Bias),也称为“偏差误差”或“系统误差”,是指模型预测值与真实值之间的差异,这种差异并不是由随机误差引起的,而是由模型本身的结构或假设导致的。模型偏差通常反映了模型对数据的拟合程度不足。 高偏差模型的特征 在训练集和验证集上都有较高的误差。模型的预测结果与真实数据相差较大。模型对新数据的泛化能力差。

Datawhale X 李宏毅苹果书 AI夏令营 Task2打卡
线性模型(Linear model) 通常模型的修改来自于对问题的理解,即领域知识 基本定义:把输入特征x乘上一个权重,再加上一个偏置就可以得到预测的结果。 优点:简单易理解,可理解性好(权重w可以直观表达了各属性在预测中的重要性) 1 分段线性曲线 1.1 线性模型的局限性 Linear(线性)的Model太过简单,对于绝大多数的实际情况来说x1与y的关系不是简单的线

Datawhale X 李宏毅苹果书AI夏令营 学习笔记
学习日志 日期: 2024年8月30日 今日学习内容: 今天,我继续学习了深度学习中的优化算法,并且着重理解了如何利用动量法、RMSProp以及Adam等高级优化器来提高模型训练的效率和效果。 1. 动量法的理解: 我学习了动量法如何通过在参数更新时考虑之前的梯度方向,使得模型能够更快地朝着全局最优解的方向前进。动量法可以有效防止模型陷入局部最小值,并能够在陡峭的下降方向上加快收敛速度。

Datawhale X 李宏毅苹果书 AI夏令营 《深度学习详解》第三章 深度学习基础
3.1 局部极小值与鞍点 1、临界点及其种类 在我们的训练中是会存在梯度下降失效的问题的 提到梯度为零的时候,大家最先想到的可能就是局部极小值(local minimum) ,但其实损失不是只在局部极小值的梯度是零,还有其他可能会让梯度是零的点,比如鞍点(saddle point)。鞍点其实就是梯度是零且区别于局部极小值和局部极大值(lo

Datawhle X 李宏毅苹果书AI夏令营深度学习笔记:如何让你的模型更聪明地学习
问题的出发点:如何智能地调整学习率? 在深度学习模型训练过程中,学习率是一个至关重要的超参数,可以把它看作是寻优过程中迈的步子大小。这个参数会影响到训练效率,以及模型是否能收敛。模型寻优时聪明不聪明很大程度上依赖学习率这个参数。 上篇文章提到,训练模型时我们有时会头痛模型卡在critical point 训练不动了,随着迭代次数增加,损失函数不再下降,而且损失函数在该点梯度变得很小。但还有另外
Datawhale X 李宏毅苹果书 AI夏令营|机器学习基础之线性模型
1. 线性模型 线性模型是机器学习中最基础和常见的模型之一。在线性模型中,预测变量(输入特征)和目标变量(输出)之间的关系被建模为一个线性组合。数学形式可以表示为: 其中:x 是输入特征向量,w 是权重向量,b 是偏置项,y 是模型的输出。 线性回归:线性回归是一种典型的线性模型,用于预测连续的数值型输出。它直接使用线性关系来进行预测,目标是找到一组权重 w 和偏置 b,使得模型

深度学习-HW3(CNN)卷积神经网络-图像分类-【Datawhale X 李宏毅苹果书 AI夏令营】
分类实际上是一个回归问题。 登录阿里云的账号,才发现有3个账号,要认证学生身份,试遍了3个账号后才试出学生认证号。打开看了一下,居然还有高校教师优惠申请,努力搞一个(最近是想薅一把教师资格证的福利,bushi)。 新建【交互式建模(DSW)】: 【打开】镜像: 打开Terminal:(真的使用命令行很少,很少) git clone https://www.modelscope.cn/da
Datawhale X 李宏毅苹果书 AI夏令营 进阶 Task2-自适应学习率+分类
目录 1.自适应学习率1.1 AdaGrad1.2 RMSProp1.3 Adam1.4 学习率调度1.5 优化策略的总结 2.分类2.1 分类与回归的关系2.2 带有 softmax 的分类2.3 分类损失 1.自适应学习率 传统的梯度下降方法在优化过程中常常面临学习率设置不当的问题。固定的学习率在训练初期可能过大,导致模型训练不稳定,而在后期可能过小,导致训练速度缓慢。为了

Datawhale X 李宏毅苹果书 AI夏令营 Task 2
课程内容 (一)术语解释 一 . Sigmoid函数与Hard Sigmoid 函数 (1)Sigmoid函数 Sigmoid函数,也称为逻辑函数(Logistic function),是一种在数学、生物学、信息科学、神经网络等领域广泛应用的激活函数。也就是高中生物中所学的S型增长曲线。 它的数学表达式为: Sigmoid函数的图像呈现出S形的曲
#Datawhale X 李宏毅苹果书 AI夏令营#2.实践方法论
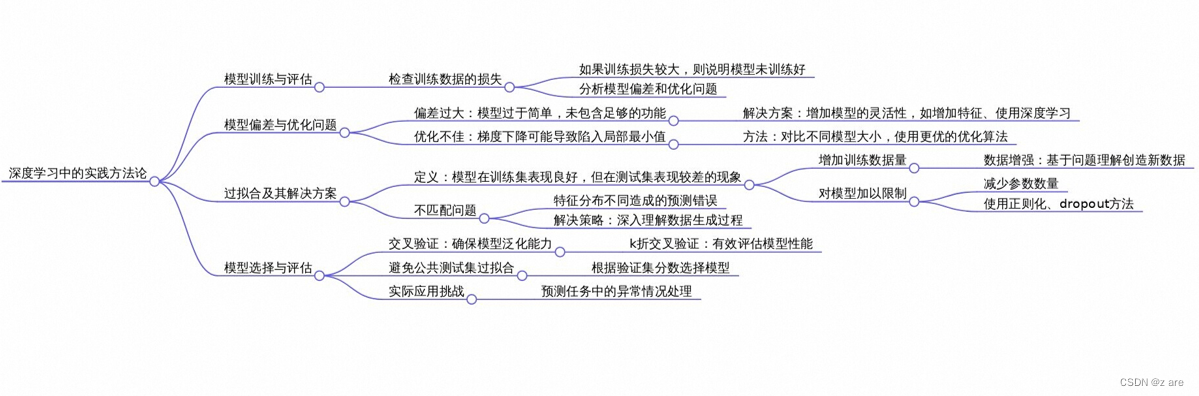
2.实践方法论 概览: 在应用机器学习算法时,实践方法论能够帮助我们更好地训练模型。如果在Kaggle上的结果不佳,首先应检查训练数据的损失,确认模型是否在训练集上表现良好。 2.1模型偏差 模型偏差可能会影响模型训练。 定义:当模型过于简单,无法捕获数据中的复杂模式时,会发生模型偏差。示例:假设模型仅能表示一组有限的函数,可以让损失变低的函数不在模 型可以描述的范围内。解决方案:重新设

Datawhale X 李宏毅苹果书 AI夏令营 Task2笔记
Datawhale X 李宏毅苹果书 向李宏毅学深度学习(进阶) 是 Datawhale 2024 年 AI 夏令营第五期的学习活动(“深度学习 进阶”方向) 往期task1链接:深度学习进阶-Task1 我做的task1的笔记博客:传送门 Datawhale官方的task2链接:深度学习进阶-Task2 Github-

李宏毅 机器学习与深度学习【2022版】 03
文章目录 一、卷积神经网络CNN二、使用验证集,模型还过拟合的原因三、深度学习的优点四、Spatial Transformer Layer 一、卷积神经网络CNN CNN在影像识别中,表现比较好。 每个感受野 receptive field 都有一个神经元去探测鸟嘴,是没有没要的,所以可以共享它们的参数。

#Datawhale X 李宏毅苹果书 AI夏令营#1.2了解线性模型
1.2线性模型 什么是线性模型? 初始模型:, 其中y表示观看人数,x1表示前一天的观看人数,这个模型就是在用前一天的观看人数来预测当前的观看人数。 模型改进: 然而真实的数据是有周期性的,每隔7天,一个循环。这样只使用前一天的数据来预测就显得不准确,我们应该考虑7天的数据。 这样我们便有了第二个模型: 这个模型考虑了前七天的数据,做了一个参数的加权求和,再加上偏置项。 如果

【Datawhale X 李宏毅苹果书 AI夏令营】《深度学习详解》Task2 打卡
文章目录 前言学习目标一、线性模型二、分段线性曲线总结 前言 本文是【Datawhale X 李宏毅苹果书 AI夏令营】的Task2学习笔记打卡。 学习目标 李宏毅老师对应视频课程:https://www.bilibili.com/video/BV1JA411c7VT?p=3 《深度学习详解》第一章主要介绍了深度学习中的基础数学知识。 一、线性模型 经过了前面的梯