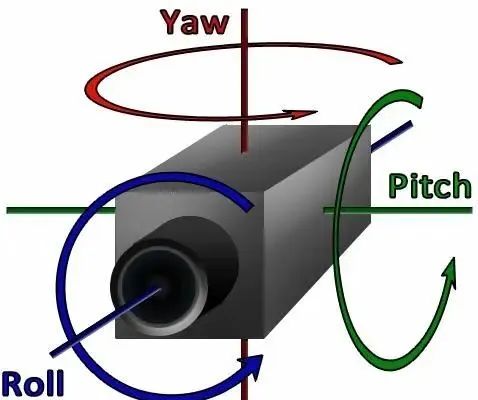
旋转变换专题

【机器人学】7-3.六自由度机器人自干涉检测-圆柱体的旋转变换【附MATLAB代码】
前言 上一章确定了机械臂等效的圆柱体的上下圆心坐标,这篇文章将解决算法三个核心中的第二个核心: 一 根据机械臂的几何数据以及DH参数,确定机械臂等效的圆柱体的上下圆心坐标。 二 将一个圆柱体旋转到与坐标Z轴对齐,另一个圆柱体转到,上下圆在XoY平面的
Open CASCADE学习|旋转变换
物体在三维空间中的旋转变换操作通常可以通过三种不同的方式来表示:矩阵(Matrix)、欧拉角(Euler Angles)和四元数(Quaternion)。下面详细解释这三种表示方法。 矩阵(Matrix) 在三维空间中,旋转可以通过3x3的旋转矩阵来表示。旋转矩阵是正交矩阵,其行列式为1,且其转置等于其逆。旋转矩阵可以直接与向量相乘,得到旋转后的向量。这种表示方法直观,但计算量大,且有时不易理

Threejs/WebGL中旋转变换的原理
目录 目录 向量的旋转变换 正交变换 WebGL中的旋转矩阵 绕Z轴的旋转矩阵 绕X轴的旋转矩阵 绕Y轴的旋转矩阵 向量的旋转变换 向量p按逆时针旋转α度,可如下表示 正交变换 上述旋转变换在高维空间中的属于正交的线性变换,即 p' = Ap,旋转矩阵A满足正交性,称为正交矩阵,正交阵遵循两个条件: A为方阵列(行)向量两两正交且为单位向量 比如:

voc边框坐标旋转变换
import osimport xml.etree.ElementTree as ETimport cv2import numpy as npfrom matplotlib import pyplot as pltann=os.listdir('./Annotations')for _ in ann:path=os.path.join('./Annotations',_)tree=ET.
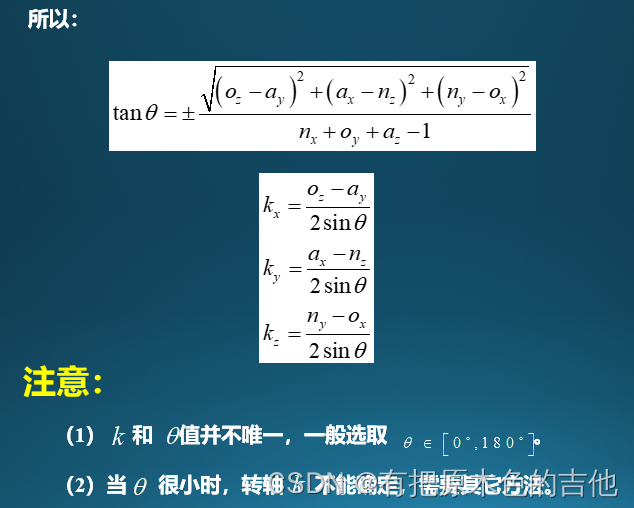
【机器人学】-位姿描述和旋转变换(2)
机器人学基础-旋转变换 空间旋转矩阵中有九个元素,但是这九个元素满足六个约束方程,只有三个独立变量 ABX = [ AXB AYB AYB ] = [ R 11 R 12 R 13 R 21 R 22 R 23 R 31 R 32 R 33 ] \begin{bmatrix}R11 & R12 & R13 \\ R21 & R22&R23\\R31&R32&R33\\ \end{bmatri

间图形旋转变换矩阵推导及matlab验证,坐标系之间的旋转平移变换与对应变换矩阵的关系...
坐标系之间的旋转平移变换与对应变换矩阵的关系 2016年06月21日 10:06:38 Peng___Peng 阅读数:46648更多 在摄影测量和计算机视觉中,经常会遇到空间坐标系之间的坐标转换问题,而两个坐标系之间的变换关系一般可以通过一个旋转矩阵R和一个平移向量T(或C)描述。因此,理解清楚坐标系之间旋转平移的转换过程与对应变换矩阵之间的关系十分重要。这个变换过程虽然简单,但是其间涉及到的

python-opencv 图像变换(缩放变换,平移变换,旋转变换,仿射变换,透视变换)
# usr/bin/env python# coding: utf-8##################### 对图像进行变换(旋转)# 2018年6月17日07:33:54import cv2import numpy as np# 这里说一下旋转的opencv中为旋转提供的三个要素# 旋转的中心点(center)# 旋转角度()# 旋转后进行放缩# 我们可以通过cv2.ge

opencv学习笔记(十):图像缩放、平移、旋转变换理论推导及应用
opencv学习笔记(十):图像缩放、平移、旋转变换理论推导及应用 文章目录 opencv学习笔记(十):图像缩放、平移、旋转变换理论推导及应用基础知识I——图像仿射变换基础知识II——图像插值算法1.为什么会有图像插值的概念?2.经典的图像插值算法最近邻插值(最简单的插值方法)双线性插值双三次插值 缩放变换——resize函数函数原型探究将一张图片缩小a倍,再将缩小后的图像放大a倍 平


【OpenCV基础】图像翻转、旋转变换、视频加载、摄像头调用
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍 收藏 ⭐不迷路🙉 📢:内容若有错误,敬请留言 📝指正!原创文,转载请注明出处 文章目录 一、图像翻转和旋转变换1.API- flip2.效果展示API- transpo
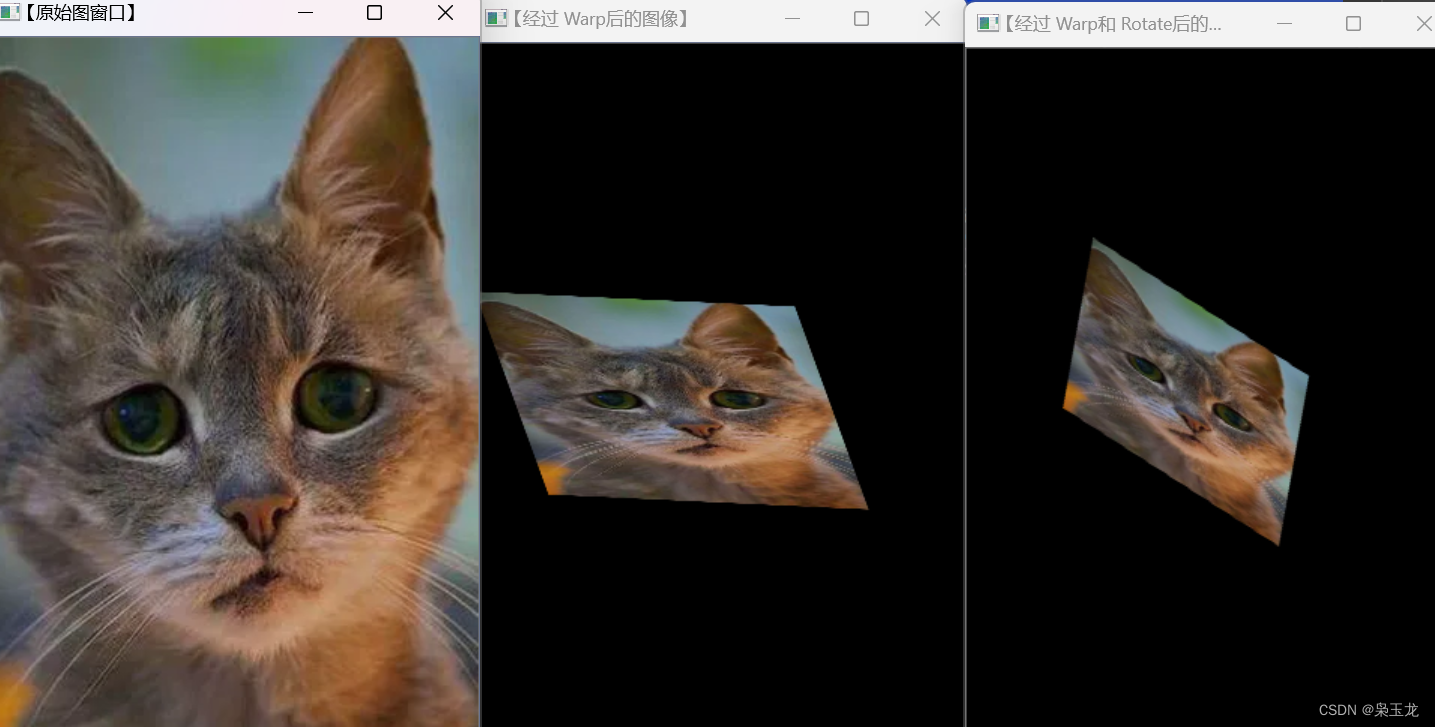
c++视觉处理---仿射变换和二维旋转变换矩阵的函数
仿射变换cv::warpAffine cv::warpAffine 是OpenCV中用于执行仿射变换的函数。仿射变换是一种线性变换,可用于执行平移、旋转、缩放和剪切等操作。下面是 cv::warpAffine 函数的基本用法: cv::warpAffine(src, dst, M, dsize, flags, borderMode, borderValue); src: 输入图像。dst:
c++视觉处理---仿射变换和二维旋转变换矩阵的函数
仿射变换cv::warpAffine cv::warpAffine 是OpenCV中用于执行仿射变换的函数。仿射变换是一种线性变换,可用于执行平移、旋转、缩放和剪切等操作。下面是 cv::warpAffine 函数的基本用法: cv::warpAffine(src, dst, M, dsize, flags, borderMode, borderValue); src: 输入图像。dst:
