方向盘专题

Android实现自定义方向盘-7livedata,viewmodel相关问题
关于 ViewModel、LiveData、Singleton 模式和跨 Activity 数据共享的相关面试题通常会涉及 Android 架构组件、状态管理和数据持久化等方面的知识。以下是一些常见的面试题以及它们的解答思路: 1. 什么是 ViewModel?它的作用是什么? 回答要点: ViewModel 是 Android 架构组件之一,旨在以生命周期感知的方式存储和管理与 UI 相关的

Android实现自定义方向盘-3添加平滑处理
为了使陀螺仪数据更加平滑和稳定,可以通过应用低通滤波器或使用滑动平均法来减少噪声。以下是如何在现有的代码基础上添加平滑处理的详细步骤。 1. 添加低通滤波器 低通滤波器是一种常用的平滑算法,用来过滤掉高频噪声,保留低频信号。我们可以在陀螺仪数据处理中使用低通滤波器来平滑旋转速度。 Step 1: 添加滤波器系数 在GameActivity中添加一个低通滤波器系数。通常,alpha值在0到1
罗技G29游戏方向盘试玩拆解,带震动力反馈
1.正好有时间记录下 自己的爱好 一千多的罗技G29游戏方向盘试玩拆解,带震动力反馈,值这个价吗_哔哩哔哩_bilibili 一千多的罗技G29游戏方向盘试玩拆解,带震动力反馈,值这个价吗_哔哩哔哩_bilibili 2.拆解 3.2个大电机 4.主控芯片 ARM STM32L100 5.霍尔传感器 统计圈数用的 6. 555的电机 搭配42W
Unity+FairyGUI)rpg方向控制的方向盘控制/摇杆
using System;using System.Collections.Generic;using System.Linq;using System.Text;using UnityEngine;using FairyGUI;using Package1;namespace Assets.Scripts{class Wheel : UIBase{private float rad
[跳槽|注意事项]职场转弯处请掌好方向盘
我国曾有句古话:女怕嫁错郎,男怕入错行。如今,这句话的后一半问题在工作不久的年轻人中尤为明显。不少新出校园的职场新新人都面着同样的困惑,他们来咨询的第一个问题都是:我究竟是不是适合这行?我该如何转行? 人生的道路要跨过很多沟沟坎坎,自古就有山路18弯之说,我们职业发展的道路也一样,没有任何人在职场的发展道路上一帆风顺,总会遇到那么几个弯和几道坎,稍有把握不住转弯的力度和角度,职业列

方向盘应该转多少度?
原文地址为: 方向盘应该转多少度? 初学车的人都希望能找到方向盘转的角度和汽车本身转过的角度之间的关系。是啊,如果能有一个明确的对应关系,学车就容易不少了,但是很遗憾,事情并不是这么简单的。自己尝试着初步研究了一下这个问题,发现方向盘转动和汽车本身运动之间存在非常复杂的非线性关系。所以,基本上是没有人通过求解这个线性系统来学车的,而是通过RL或者Q-Learning来进行神经网络学习
matlab 直道转向时方向盘最小转角算法
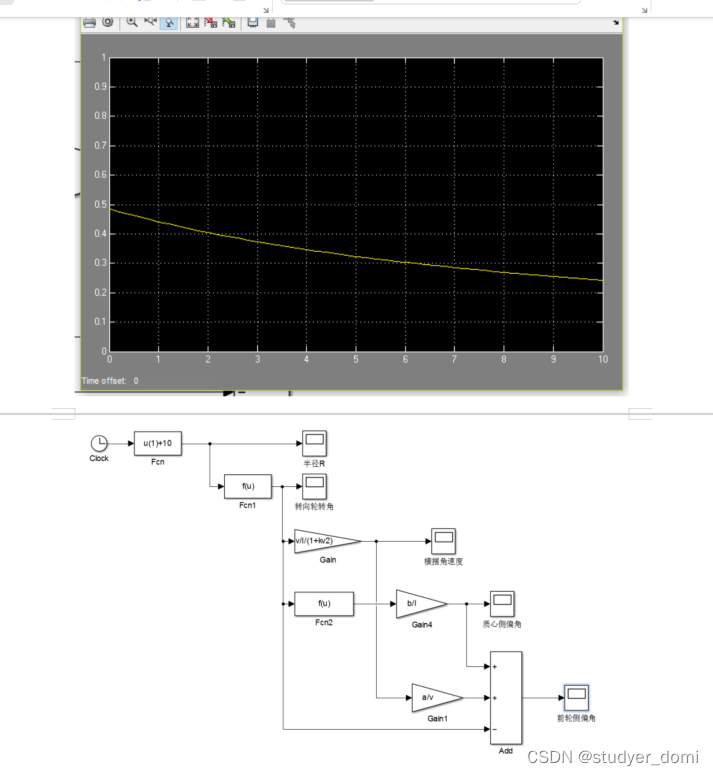
1、内容简介 略 33-可以交流、咨询、答疑 2、内容说明 汽车主动转向,直道转向时方向盘最小转角算法,一个m脚本和simulink的计算结果 略 3、仿真分析 略 4、参考论文 汽车主动转向关键技术研究

【方向盘】做加法容易做减法难,程序员的我深有同感
不停的做减法,你会更优秀。 本文已被https://yourbatman.cn收录;女娲Knife-Initializr工程可公开访问啦;程序员专用网盘https://wangpan.yourbatman.cn;公号后台回复“专栏列表”获取全部小而美的原创技术专栏 你好,我是方向盘(YourBatman、方哥) ✍前言 现在的你是不是感到时间不够:没时间看书、没时间学习、没时间写文章、
matlab 直道转向时方向盘最小转角算法
1、内容简介 略 33-可以交流、咨询、答疑 2、内容说明 汽车主动转向,直道转向时方向盘最小转角算法,一个m脚本和simulink的计算结果 略 3、仿真分析 略 4、参考论文 汽车主动转向关键技术研究
CarsimVeristand联合仿真系列-油门和方向盘信号的配置(纯软件层面,模拟量)04
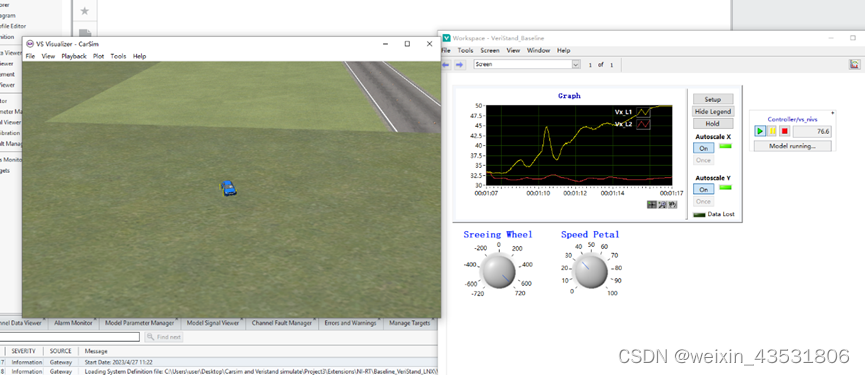
回到Carsim主界面,这次我们给模型外接两个模拟量信号,分别是油门和方向盘信号 此案例模拟在油门或方向盘变动时,车辆运动状态的改变,此模型是基于DLC 双移路作出更改 框1, 选择COPY AND LINK 完成DLC路的复制并重新命名,并点击进入下层界面配置 进入测试配置界面后,按照下图顺序,依次完成配置 框2 定速 10KM/H 框3 修改成长直线,需单独配置 框4 路桩需配

项目实战:自动驾驶之方向盘操纵
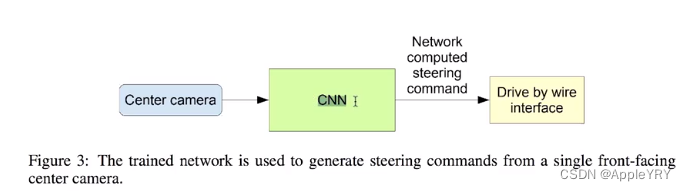
项目介绍 根据汽车前方摄像头捕捉的画面,控制汽车方向盘转动的方向和角度,这是自动驾驶要解决的核心问题。这个项目主要是通过使用深度神经网络解决一个回归问题。不同于分类、识别场景,回归问题中神经网络输出的是一个连续的值。 通过这个项目的学习,可以将神经网络用于通过人脸判断年龄,美颜指数等领域。在这个项目里,还可以学到图像增强的技术,用于提高网络的性能。 思维导图 深度学习本身最重要的是数据,在汽

【方向盘】使用IDEA的60+个快捷键分享给你,权为了提效(重构篇)
本文已被https://yourbatman.cn收录;女娲Knife-Initializr工程可公开访问啦;程序员专用网盘https://wangpan.yourbatman.cn;技术专栏源代码大本营:https://github.com/yourbatman/tech-column-learning;公号后台回复“专栏列表”获取全部小而美的原创技术专栏 你好,这里是Java方向盘
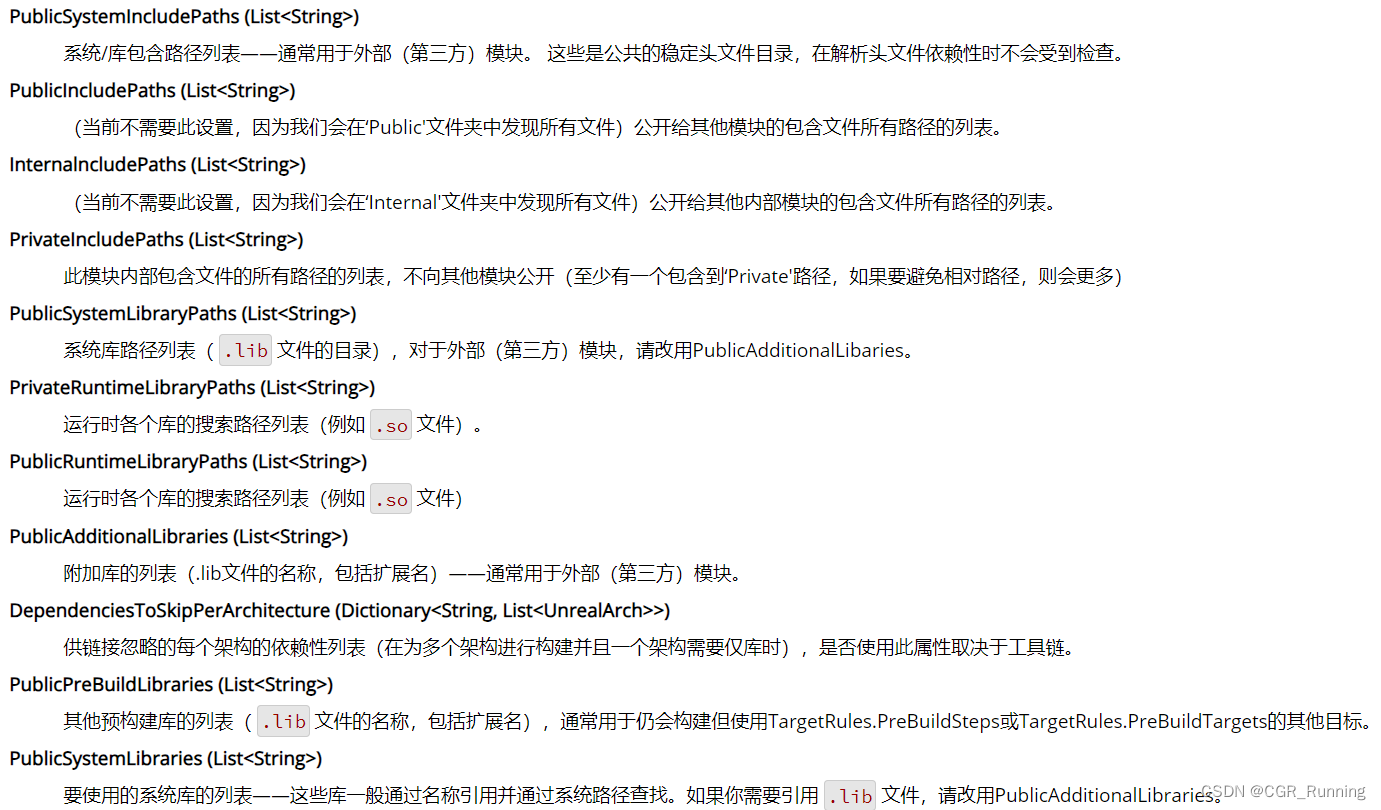
UE4版本的罗技方向盘驱动插件升级为UE5版本,及相应出现的问题
项目场景: 将基于UE4版本的罗技方向盘驱动插件升级为UE5版本 问题描述 问题一:将获取的UE4版本的罗技驱动插件直接放入UE5的项目工程中,然后直接通过生成C++文件会报图中共的错误。 原因分析: 观察其中报错信息: C:\FFBPlugin_10.25\FFBTest5\Plugins\LogitechWheelPlugin\Source\LogitechWheel

汽车方向盘助力转向器如何接线_汽车如何加注机油、防冻液、玻璃水、助力油...
汽车逐渐成为我们家庭的必备交通工具,然而汽车又是一台结构复杂、需要精心维护的机械系统,如果对它没有基本的了解是无法保证他的正常行驶的。当然,过于复杂和专业的维护我们没有必要都掌握,但是一些基本的常识需要我们了解和熟悉。今天我给大家分享一下汽车正常运转时需要加注各种液体的方法,如汽油、机油、防冻液、玻璃水、助力油等,希望对大家有帮助。另外,需要提醒的是,我们进行长途跋涉前,需要对以上各种液
【方向盘】MyBatis基础知识33问(详解面试题)
和有钱人在一起,你就会有赚钱的欲望。和穷人在一起,你就会习惯平淡。和励志的人在一起,你就会有上进行。和懒的人在一起,你就会变成一个废人 本文已被https://yourbatman.cn收录;女娲Knife-Initializr工程可公开访问啦;程序员专用网盘https://wangpan.yourbatman.cn;公号后台回复“专栏列表”获取全部小而美的原创技术专栏 你好,我是方向盘(

DIY 一个汽车方向盘游戏外设(MMOS OSW DIY)
OSW-MMOS直驱方向盘DIY过程记录 - 简书 (jianshu.com) DIY 一个汽车方向盘游戏外设(MMOS OSW DIY) 首先讲一下这个直驱系统大概的框架,首先是电脑,电脑里装MMOS的软件(这个软件国内高手把它汉化了的),电脑通过USB线,连接一个stm32板,这个stm 32板上刷MMOS的固件,这个STM32板再通过一根脉冲线,连接到电机驱动器上

方向盘打死是多少度 打死需要几圈
相信每个在驾校学过车的人都有过被教练喊“打死”“打死”的话语吧,而对于方向盘打死,很多学员都对方向盘打死是几圈还是多少度很是迷茫,那么,方向盘打死是多少度呢?打死需要几圈呢?下面就一起来了解一下吧。 方向盘打死是多少度 方向盘打一圈即是360°,打四分之一圈即是90°,其实我们可以把方向盘当成是一个时钟,正确的握方向盘的姿势是左手握在方向盘的9点附近,右手握在3点附近,如下图所示,如果你想打一
脉冲法和方向盘转角法计算车辆位置不同应用工况
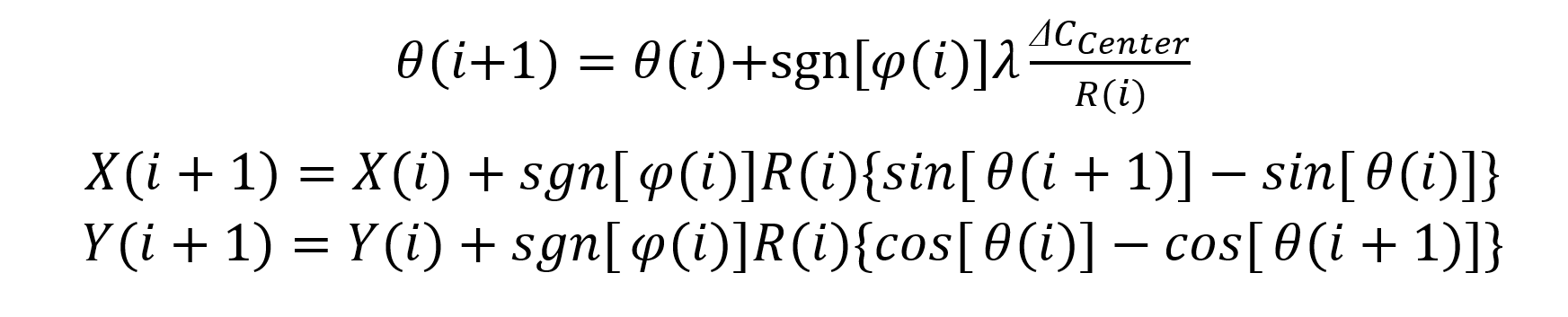
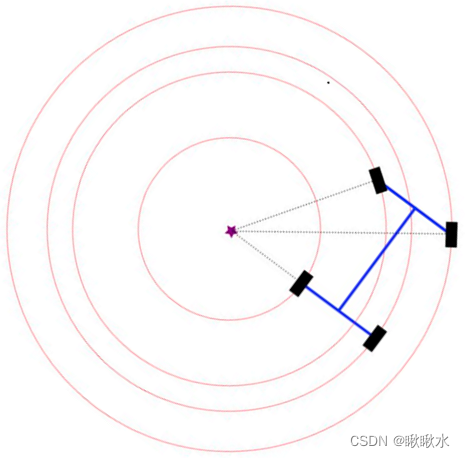
1. 脉冲法计算车辆位置 在定义下的世界坐标系中,车辆运动分为右转后退、右转前进、左转后退、左转前进、直线前进、直线后退和静止七种工况,因此需要推倒出一组包含脉冲、车辆运动方向和车辆结构尺寸参数的综合方程式进行车辆轨迹的实时迭代计算。由于直线行驶和曲线行驶的半径分别是无穷大和正常值,因此分为直线行驶和曲线行驶两种工况。在以下公式推导中,所有弧长和弦长微元值无符号,而车辆偏航角微元值带正负。
使用MPU6050计算方向盘角度
我给你们作了榜样、叫你们照着我向你们所作的去作。 ——【约翰福音13:15】 1.前言 前段时间接到一个项目需求:使用现有的陀螺仪MPU6050实现计算当前车辆的方向盘角度。 2.需求分析 MPU6050可获取三轴角速度和三轴加速度,并通过算法可以获得横滚角、俯仰角、航向角。 方向盘角度旋转会同步引起车轮的角度变化,方向盘旋转角度与车轮角度是一个已知量,可从实际车辆设计中获得,本次需求

使用TX2读取USB手柄/方向盘的输出控制
非原创项目需要 留存 摘要:在淘宝上买到的游戏手柄/USB卖家只给了Windows下的驱动,本来以为Ubuntu下没有驱动,没想到网上早已经有人用cpp开发出了USB手柄的驱动,搜索很多博客的方法终于从手柄拿到数据。 Linux真给力!! 目录 目录1.cat命令2.hexdump命令3.获取游戏手柄的端口输出(1)获取端口(2)读取游戏手柄端口数据4.代码实现warning:de