本文主要是介绍UE4版本的罗技方向盘驱动插件升级为UE5版本,及相应出现的问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
项目场景:
将基于UE4版本的罗技方向盘驱动插件升级为UE5版本
问题描述
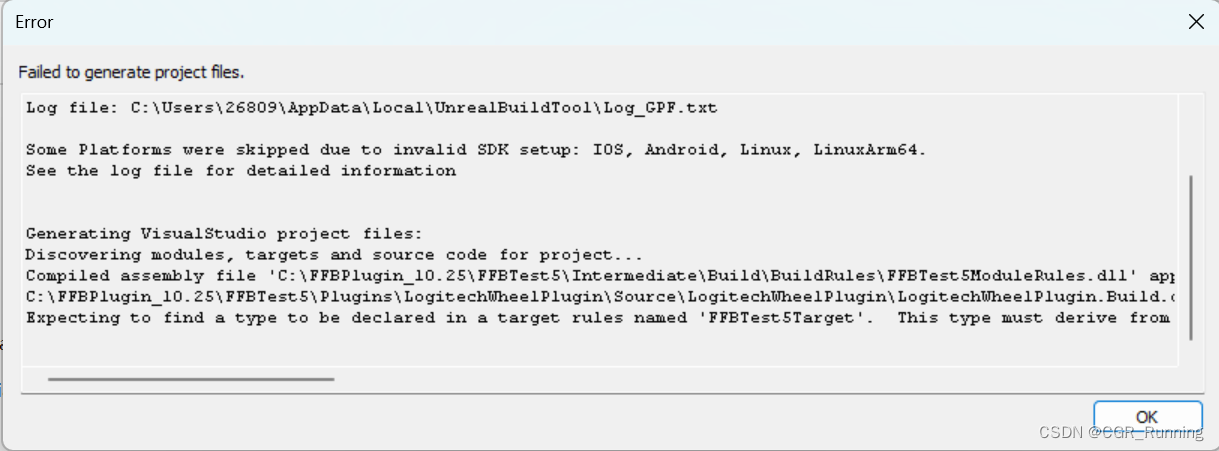
问题一:将获取的UE4版本的罗技驱动插件直接放入UE5的项目工程中,然后直接通过生成C++文件会报图中共的错误。
原因分析:
观察其中报错信息:
C:\FFBPlugin_10.25\FFBTest5\Plugins\LogitechWheelPlugin\Source\LogitechWheelPlugin\LogitechWheelPlugin.Build.cs(62,9): error CS0103: The name 'PublicLibraryPaths' does not exist in the current context
可以看出是插件的.Build.cs文件中的PublicLibraryPaths无法识别。但该插件在UE4是正常运行的,且已经可以定位是在插件调用第三方库的命令的问题,可以推测是UE4中调用第三方库的命令在UE5中已经发生了变化。
UE5.2官方文档中关于插件调用第三方库的部分和相应命令。
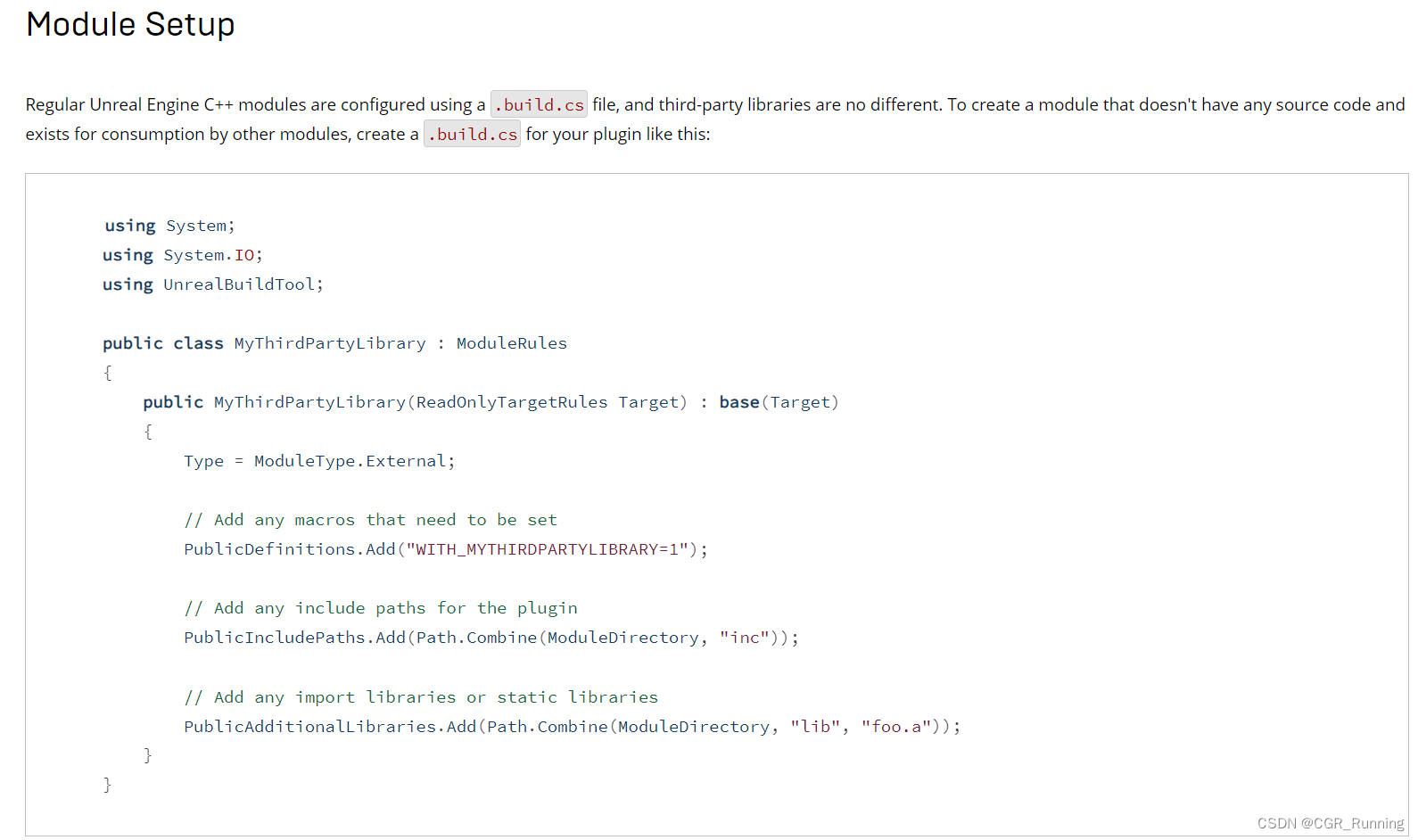
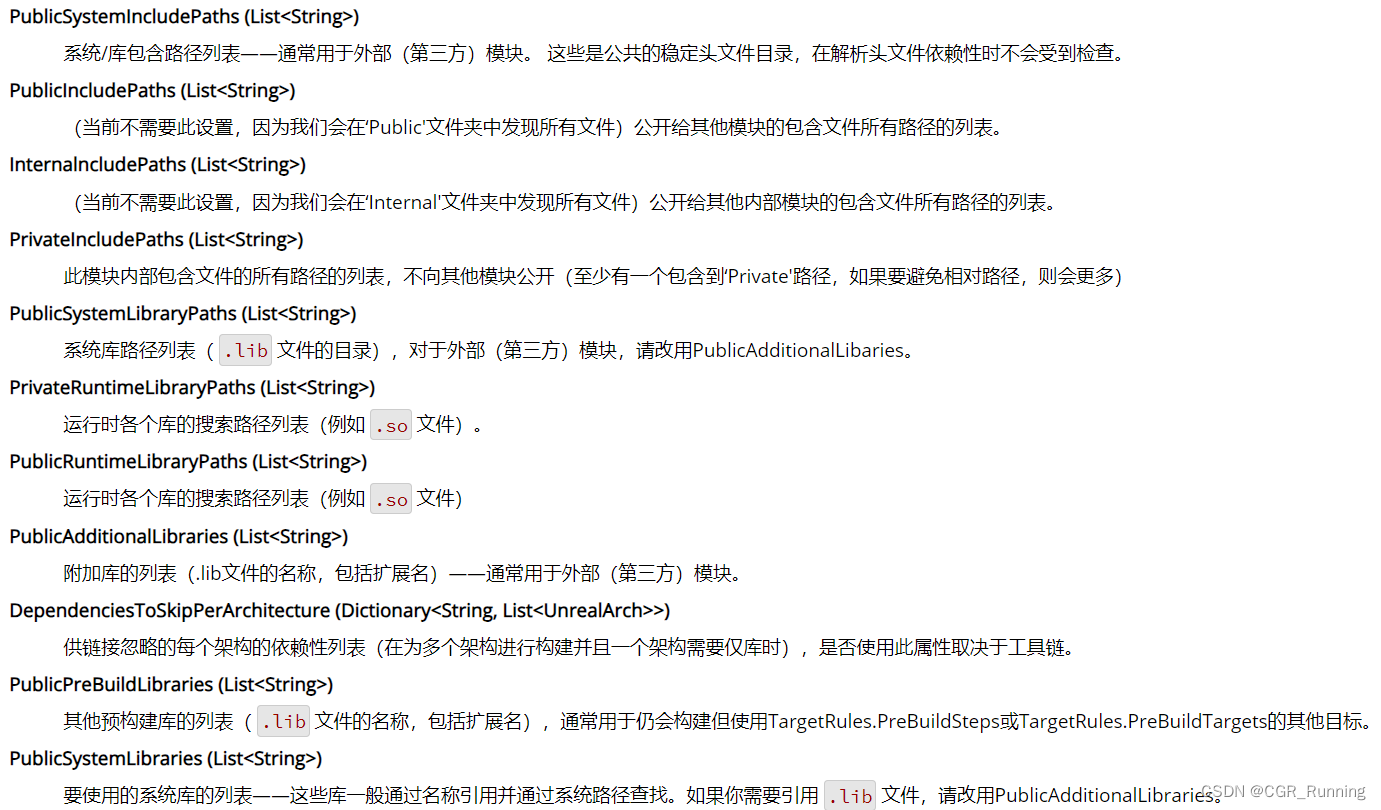
可以发现PublicLibraryPaths属性已不再使用,随后尝试PublicIncludePaths等属性替换PublicLibraryPaths。
问题二:使用插件的过程中会发现每次重新打开项目会显示使用插件的蓝图节点会无法识别到
解决方案:
问题一:当使用PublicIncludePaths替换PublicLibraryPaths后,即可右键UE项目文件.uproject生成VS文件,无报错。
打开VS文件,尝试生成解决方案,报错:无法识别到相应LogitechSteeringWheelLib.lib文件。此时使用PublicSystemLibraryPaths替换PublicIncludePaths,且将第三方库的.lib文件幅值到C:\Windows\SysWOW64中,然后重新生成解决方案,显示成功无报错,进行后续测试功能完整且项目可打包。
问题二:将插件的.uplugin文件中"LoadingPhase": "Default"修改为"LoadingPhase": "PreDefault"即可。
这篇关于UE4版本的罗技方向盘驱动插件升级为UE5版本,及相应出现的问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








