整定专题

2-84 基于matlab-GUI的 PID自整定参数整定
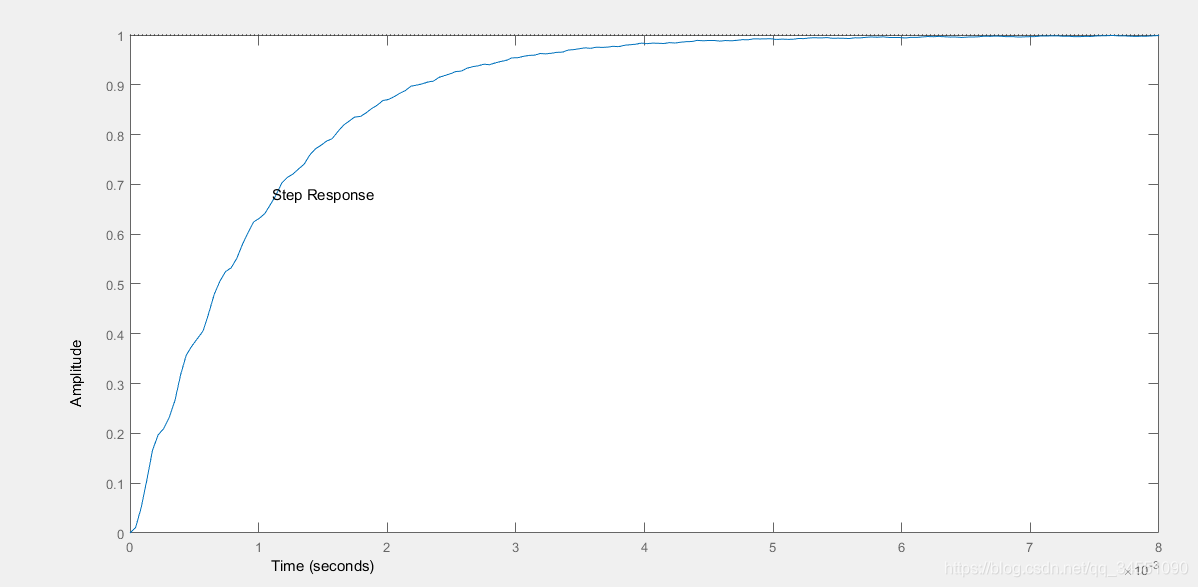
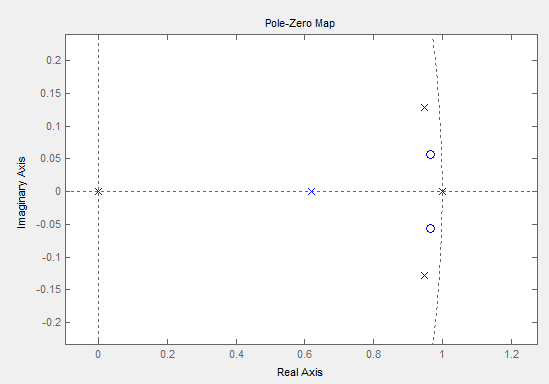
基于matlab-GUI的 PID自整定参数整定,在PID参数整定操作面板输入分子系数、分母系数,然后开始整定,整定过程中提示你是否满足整定要求,可持续整定直至得到比例度、积分时间、微分时间、上升时间、调节时间等指标。输出响应曲线。程序已调通,可直接运行。 2-84 上升时间、调节时间 - 小红书 (xiaohongshu.com)
永磁同步直线电机(PMLSM)控制与仿真3-永磁同步直线电机数学三环控制整定
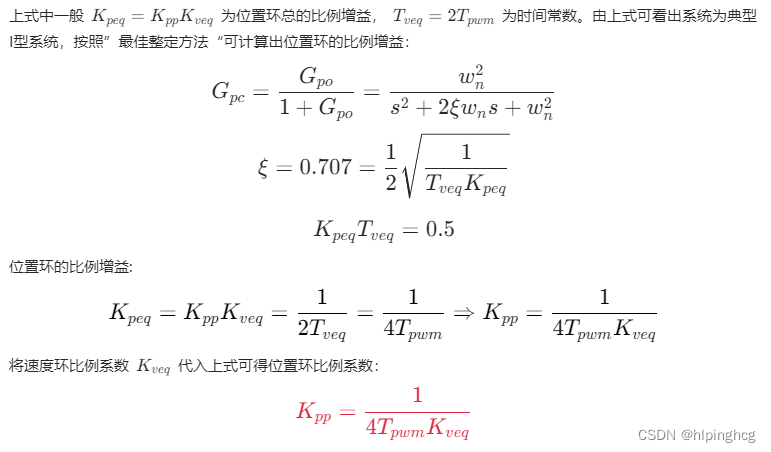
文章目录 1、电流环参数整定2、速度环参数整定3、位置环参数整定 写在前面:原本为一篇文章写完了永磁同步直线电机数学模型介绍,永磁同步直线电机数学模型搭建,以及永磁同步直线电机三环参数整定及三环仿真模型搭建,但因为篇幅较长,所以分开写。 永磁同步直线电机数学模型 永磁同步直线电机数学模型搭建 永磁同步直线电机数学三环控制整定 永磁同步直线电机数学三环闭环控制仿真 1、电流环参
simulink-仿真以及PID参数整定/PID tuner 的使用流程
控制器搭建与参数整定 搭建一个前馈PID控制器控制系统PID tuner使用 一个懂点控制但不多的小白,因为需要利用simulink仿真,所以不得不学习一些仿真的知识,这篇文章适合和我一样的新手入门,有理解错误的地方希望大手们能够指出来共同学习。 搭建一个前馈PID控制器控制系统 控制框图 这里边有几点我简单的记录一下: 1.通常我们的被控对象,我们应该是最先得到它的时域

【论文推导】基于有功阻尼的转速环PI参数整定分析
前言 在学习电机控制的路上,PMSM的PI电流控制是不可避免的算法之一,其核心在于内环电流环、外环转速环的设置,来保证转速可调且稳定,并且保证较好的动态性能。整个算法仿真在《现代永磁同步电机控制原理及matlab仿真》中已详细给出,但针对转速环中的“有功阻尼”推导转速话PI参数的过程,描述得较为模糊,理解起来比较困难,故本文将基于现有资料给出“基于有功阻尼转速环PI参数整定”的分析。 理论
基于遗传算法的PID参数整定研究(一)
基于遗传算法的PID参数整定研究 综合PID参数整定的发展来看,根据研究方法划分有基于频域的PID参数整定方法和基于时域的PID参数整定方法;根据发展阶段划分有常规PID参数整定方法和智能PID参数整定方法;根据被控对象个数划分有单变量PID参数整定方法和多变量PID参数整定方法;根据控制量的组合形式划分有线性PID参数整定方法和非线性PID参数整定方法等。目前主要有基于模式识别的参数整定方法(

基于Ziegler-Nlichols 方法的PID参数整定
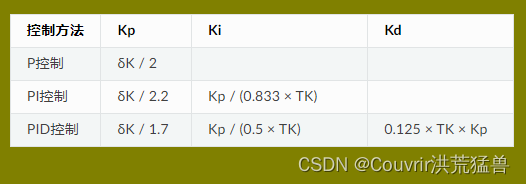
基于Ziegler-Nlichols 方法的PID参数整定 Ziegler-Nichols方法是基于稳定性分析的PID整定方法。该方法整定比例系数Kp的思想是,首先置Ki=KD=0,然后增加Kp。直至系统开始振荡(即闭环系统极点在jw轴上),再将Kp乘以0.6,即为整定后的比例系数Kp。 整定的计算公式如下: 式中,Km为系统开始振荡时的Kp值,wm为振荡频率。 利用根轨迹法可以确定K

josef约瑟 电流继电器 RL-D1 电压AC220V 整定范围0-9.99AAC
系列型号 RL-D1型电流继电器; RL-D2型电流继电器; 基本参数 RL-D系列电流继电器用于发电机、变压器和输电线的过负荷和短路保护装置中作为启动元件。本继电器为集成电路型继电器,精度高、功耗小、动作时间快, 返回系数高、整定直观方便、范围宽,提供直流辅助电源后*可替代电磁型电流继继电器。 RL-D1电流继电器 触点形式2副转换触点、3副转换触点 整定范围0.19.

PID控制参数整定(调节方法)原理+图示+MATLAB调试
PID控制参数整定(调节方法)原理+图示+MATLAB调试 Chapter1 PID控制参数整定(调节方法)原理+图示+MATLAB调试序一、P参数选取二、I的调节三、D的调节四、总结 Chapter2 PID参数调整,个人经验(配输出曲线图)Chapter3 PID温度控制参数整定方法Chapter4 simulink中的PID模块的使用1、Simulink中PID模块的介绍1.1、控制器
电机应用开发-PID控制器参数整定
PID控制器参数整定 比例调节:调节作用快,系统一出现偏差,调节器立即将偏差放大输出。 积分调节:输出变化和输入偏差的积分成正比。输出不仅取决于偏差大小,还取决于偏差存在的时间。只要有偏差存在,尽管偏差可能很小,但它存在的时间越长,输出信号就越大。只有消除偏差,输出才停止变化。 微分调节:输出与被调量的变化率成正比。微分调节越大,越能提前响应,但是也会将不必要的偏差放大。 PID控

供应原厂电流继电器 - HBDLX-21/3 整定电流范围0.1-1.09A AC220V
HBDLX系列型号: HBDLX-20/1零序过电压继电器;HBDLX-20/2零序过电压继电器 HBDLX-20/3零序过电压继电器;HBDLX-20/4零序过电压继电器 HBDLX-20/5零序过电压继电器;HBDLX-21/1零序过电压继电器 HBDLX-21/2零序过电压继电器;HBDLX-21/3零序过电压继电器 HBDLX-21/4零序过电压继电器;HBDLX-21/5零序过电压继电
matlab控制器参数整定方法
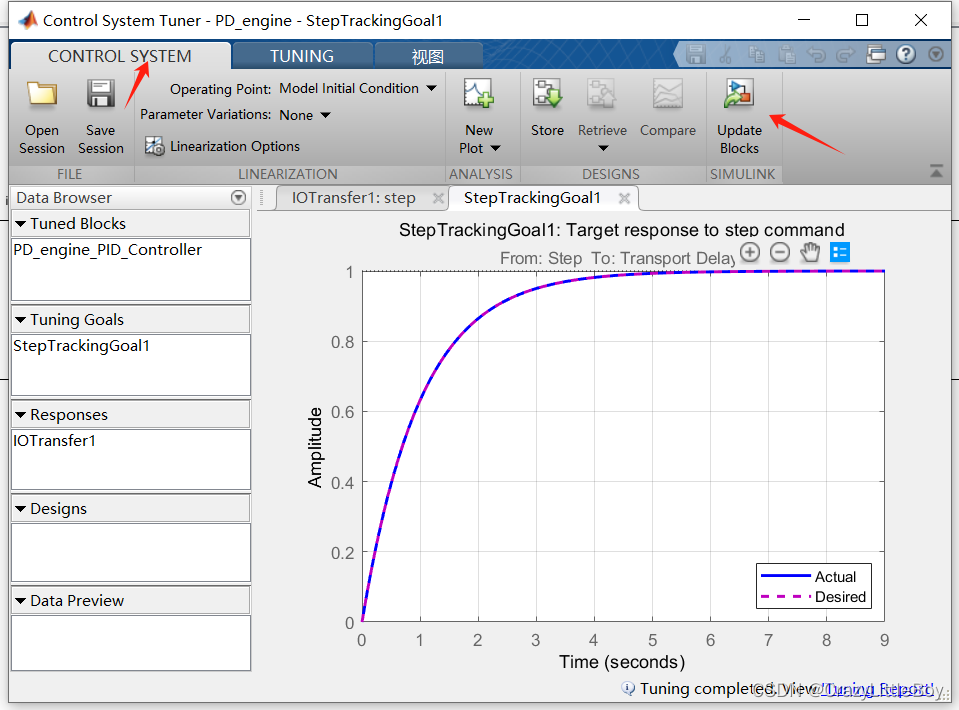
文章目录 systune方法codesimulink + code HinfStruct方法标准控制结构simulink + code systune方法 针对上述控制结构图,利用matlab整定参数。 code %% Tuning Control Systems with SYSTUNE% systuneWorkflowExample.mG = tf([2],[0.
我的四轴专用PID参数整定方法及原理---超长文慎入
给四轴调了好久的PID,总算是调好了,现分享PID参数整定的心得给大家,还请大家喷的时候手下留情。 首先说明一下,这篇文章的主旨并不是直接教你怎么调,而是告诉你这么调有什么道理,还要告诉大家为什么‘只’使用PID的四轴会在飞行中震荡,告诉大家为什么光使用PID并不能实现对四轴姿态‘足够好’的控制。文章中还是涉及了不少自控原理和其他控制相关的姿势,没有一点底子的话确实会看着
STC16f40k128 使用VOFA+进行电机PID参数整定
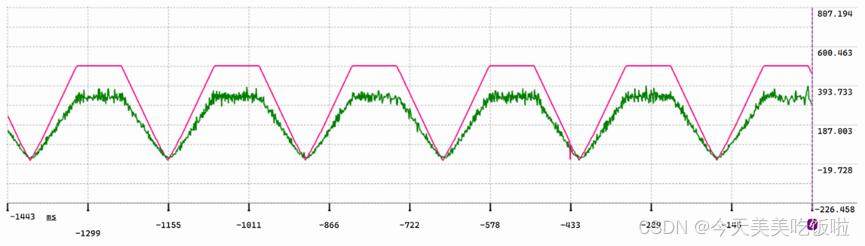
文章目录 前言VOFA+简介必要工作配置STC16的UART模块VOFA+使用 前言 最近为了准备智能车比赛,参加相关培训,受学长推荐受用VOFA+上位机可视化波形,协助电机转速PID调整。 但是我这个芯片吧,STC16它不支持在线仿真,所以看关键变量的话就必须得借助串口来协助调试程序了。 VOFA+简介 VOFA+是一个串口调试助手,但凭它简单的通信协议、数据可视化以及频

550MW发电机变压器组继电保护的整定计算及仿真
摘要 电力系统继电保护设计是根据系统接线图及要求选择保护方式,进行整定计算,电力系统继电保护的设计与配置是否合理直接影响到电力系统的安全运行。如果设计与配置不当,保护将不能正确工作,会扩大事故停电范围,造成人身和设备事故,给国民经济带来严重的恶果,因此,合理地选择保护方式和正确地整定计算,对保证电力系统的安全运行有非常重要的意义。 电力系统继电保护的设计与配置是否合理会直接影响到电力系统的安全
如何通俗地解释 PID 参数整定?
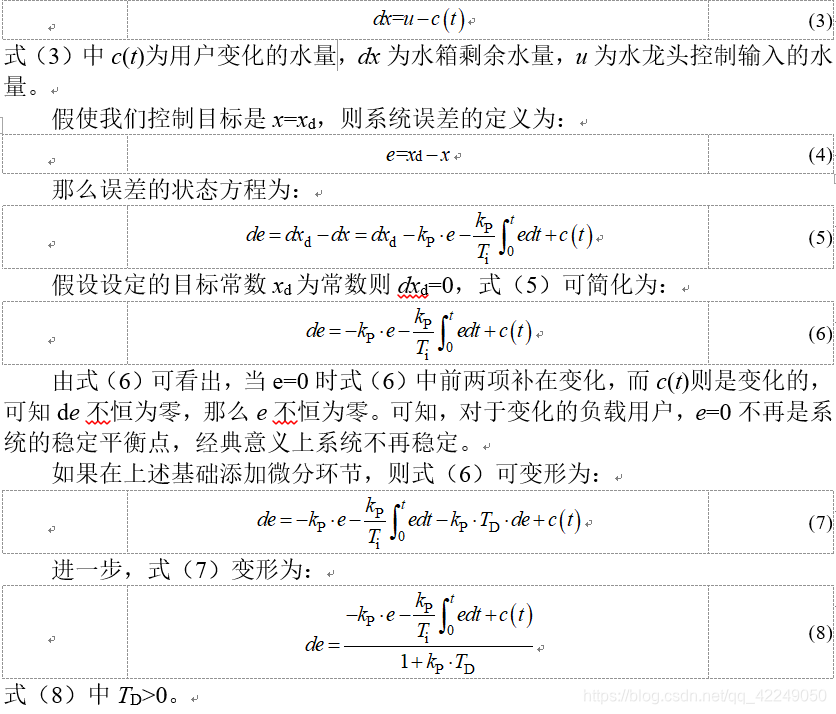
作者:忘川孤帆 链接:https://www.zhihu.com/question/23088613/answer/23942834 来源:知乎 著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。 由于PID属于无模型控制,调节三个环节的参数会产生什么影响根据控制对象的不同也会有很大差别。你提到的这些结论其实都是根据经验总结出来的。 既然你说是从来没有接触过PID,那我就举

ODrive移植keil(六)—— 测量电阻电感和电流环PI参数整定
目录 一、硬件接线二、程序演示2.1、官方代码操作2.2、移植后的代码操作 三、测量原理3.1、测量电阻3.2、测量电感 四、代码说明五、电流环PI参数整定 ODrive、VESC和SimpleFOC 教程链接汇总:请点击 一、硬件接线 驱动板 购买链接:某宝购买 电机 购买链接:某宝购买 二、程序演示 2.1、官方代码操作 请先将驱动板刷机v