本文主要是介绍STC16f40k128 使用VOFA+进行电机PID参数整定,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 前言
- VOFA+简介
- 必要工作
- 配置STC16的UART模块
- VOFA+使用
前言
最近为了准备智能车比赛,参加相关培训,受学长推荐受用VOFA+上位机可视化波形,协助电机转速PID调整。
但是我这个芯片吧,STC16它不支持在线仿真,所以看关键变量的话就必须得借助串口来协助调试程序了。
VOFA+简介
VOFA+是一个串口调试助手,但凭它简单的通信协议、数据可视化以及频域分析,三维打印等优点在众多串口调试助手中脱颖而出。
就凭一个打印波形,屁颠屁颠就冲这软件来了。
必要工作
下面讲解一下如何使用keil对STC16进行开发时,将需要重点关注的变量打印到VOFA+上来,甚至对其可视化。
配置STC16的UART模块
VOFA+本质上是一个串口,打印我们想要关注的数据就是需要STC16和串口之间的通信。STC16上有专门用于通信的模块UART(通用异步收发传输器),他的通信协议相较于其他的IIC,SPI,CAN等通信协议都简单得多,UART也更容易上手。
(UART 原理我就不讲了 直接贴代码吧)
uart.c文件
文件中包含uart初始化函数以及通信字符传输函数,文件中已经对printf做了重定向,像c语言直接printf(“”)想要的数据就可以实现了
#include "stc16f.h"
#include "stdio.h"
#include "uart.h"
#include "led.h"
#include "pid.h"unsigned char TX1_Cnt; //发送计数
unsigned char RX1_Cnt; //接收计数
unsigned char TX2_Cnt; //发送计数
unsigned char RX2_Cnt; //接收计数
unsigned char TX3_Cnt; //发送计数
unsigned char RX3_Cnt; //接收计数
unsigned char TX4_Cnt; //发送计数
unsigned char RX4_Cnt; //接收计数static uint8_t tempData[16] = {0,0,0,0,0,0,0,0,0,0,0x80,0x7F};bit B_TX1_Busy; //发送忙标志
bit B_TX2_Busy; //发送忙标志
bit B_TX3_Busy; //发送忙标志
bit B_TX4_Busy; //发送忙标志unsigned char xdata RX1_Buffer[UART1_BUF_LENGTH]; //接收缓冲
unsigned char xdata RX2_Buffer[UART2_BUF_LENGTH]; //接收缓冲void Init_UART1(void)
{TR1 = 0;AUXR &= ~0x01; //S1 BRT Use Timer1AUXR |= (1<<6); //Timer1 set as 1T modeTMOD &= ~(1<<6); //Timer1 set As TimerTMOD &= ~0x30; //Timer1_16bitAutoReload;TH1 = (unsigned char)(BaudRate1Timer / 256);TL1 = (unsigned char)(BaudRate1Timer % 256);ET1 = 0; //禁止中断INTCLKO &= ~0x02; //不输出时钟TR1 = 1;SCON = (SCON & 0x3f) | 0x40; //UART1模式, 0x00: 同步移位输出, 0x40: 8位数据,可变波特率, 0x80: 9位数据,固定波特率, 0xc0: 9位数据,可变波特率
// PS = 1; //高优先级中断ES = 1; //允许中断REN = 1; //允许接收P_SW1 &= 0x3f;
// P_SW1 |= 0x00; //UART1 switch to, 0x00: P3.0 P3.1, 0x40: P3.6 P3.7, 0x80: P1.6 P1.7, 0xC0: P4.3 P4.4
// PCON |= (1<<4); //内部短路RXD与TXD, 做中继, ENABLE,DISABLEB_TX1_Busy = 0;TX1_Cnt = 0;RX1_Cnt = 0;
}
void PrintString1(unsigned char *puts)
{for (; *puts != 0; puts++) //遇到停止符0结束{SBUF = *puts;B_TX1_Busy = 1;while(B_TX1_Busy);}
}
void UART1_int (void) interrupt 4
{LED_A_TG;if(RI){RI = 0;RX1_Buffer[RX1_Cnt] = SBUF;if(++RX1_Cnt >= UART1_BUF_LENGTH) RX1_Cnt = 0;}if(TI){TI = 0;B_TX1_Busy = 0;}
}
void UART1_SendData(char dat)
{
// ES = 0; //关串口中断SBUF = dat; B_TX1_Busy = 1; while(B_TX1_Busy); //等待发送成功
// TI = 0; //清除发送中断标志
// ES = 1; //开串口中断
}
void UART1_SendString(char *s)
{while(*s)//检测字符串结束符{UART1_SendData(*s++);//发送当前字符}
}
//void Vofa_Graph()
//{
// static float temp[2];
//
// temp[0] = pid_Speed.ReferenceValue;
// temp[1] = pid_Speed.ActualValue;
memcpy(tempData, (uint8_t *)&temp, sizeof(temp));
// write((char*)temp,sizeof(float)*2);//}char putchar(char c)
{UART1_SendData(c);return c;
}uart.h文件
#ifndef _UART_H_
#define _UART_H_#include "stc16f.h"#define BaudRate1 9600//
#define BaudRate2 19200
#define BaudRate3 115200
#define BaudRate4 4800#define BaudRate1Timer (65536 - MAIN_Fosc / BaudRate1 / 4)
#define BaudRate2Timer (65536 - MAIN_Fosc / BaudRate2 / 4)
#define BaudRate3Timer (65536 - MAIN_Fosc / BaudRate3 / 4)
#define BaudRate4Timer (65536 - MAIN_Fosc / BaudRate4 / 4)#define UART1_BUF_LENGTH 128
#define UART2_BUF_LENGTH 128
#define UART3_BUF_LENGTH 128
#define UART4_BUF_LENGTH 128void Init_UART1(void);
void Init_UART2(void);
void Init_UART3(void);
void Init_UART4(void);
void PrintString1(u8 *puts);
void UART1_SendData(char dat);
void UART1_SendString(char *s);
void Vofa_Graph(void);#endif
我这里使用Timer1作为UART1的波特率发生器。虽然STC16有很多UART,用一个就够了,而且Timer3Timer4用来捕获电机的编码器输入进行测速,Timer0做定时中断。
若需要修改波特率,需要在uart.h文件中修改BaudRate1宏定义即可。
VOFA+使用
打开VOFA软件后,对VOFA进行配置
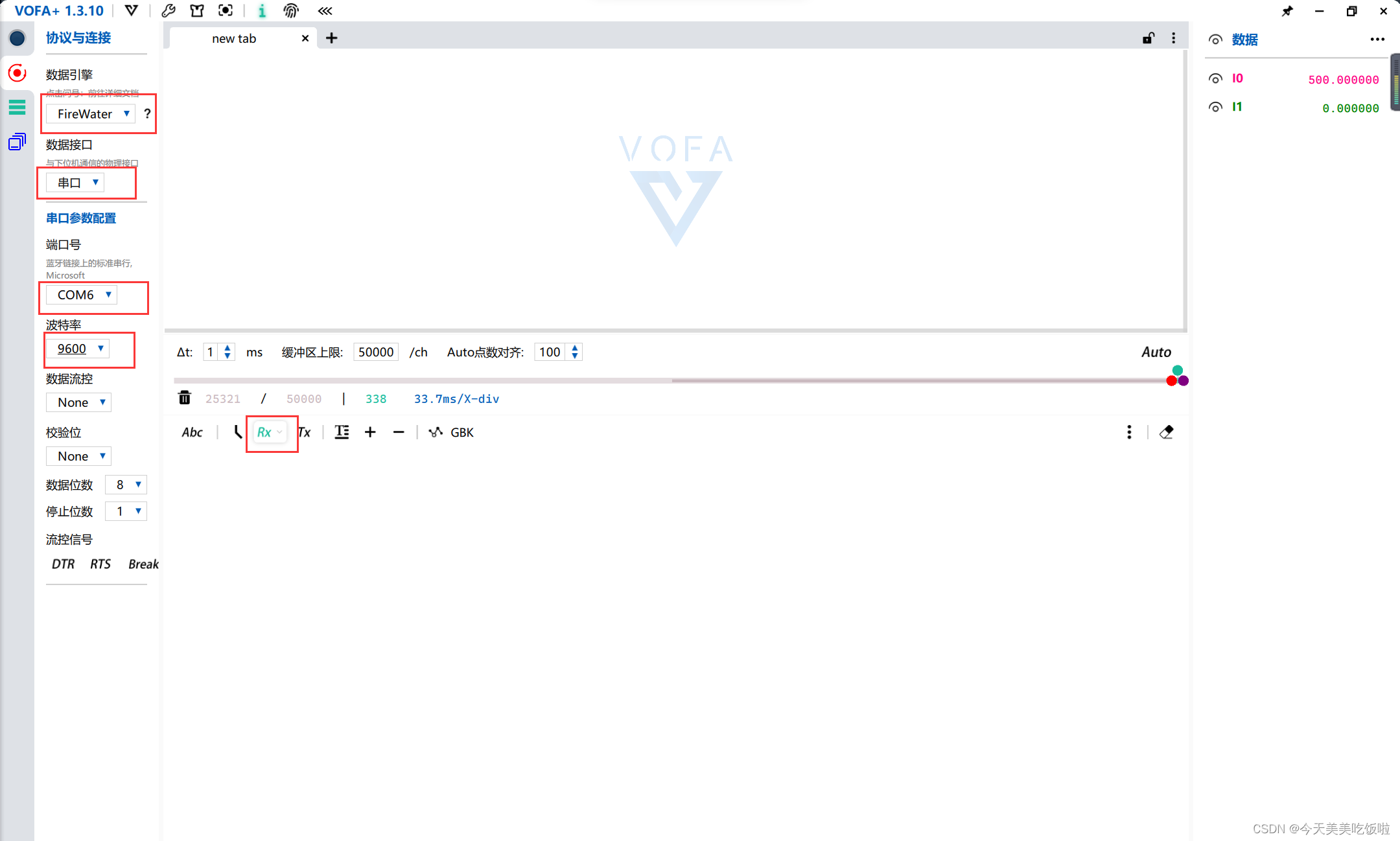
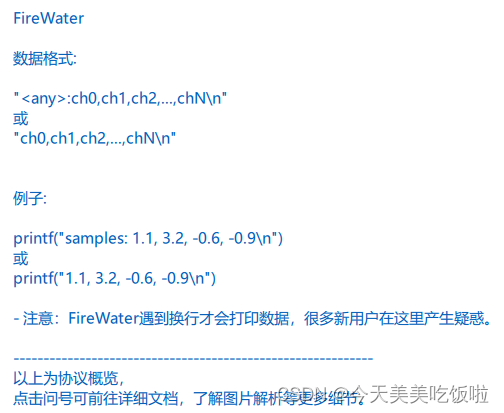
数据引擎选择firewater协议,这个协议可以简单打印数据波形。
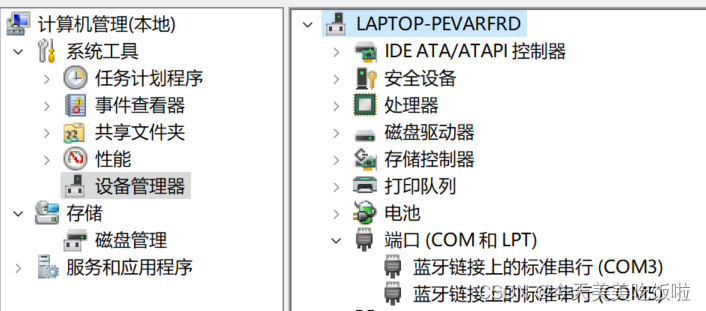
数据接口选择stc16的com端口号,这个可以进设备管理器查看
根据你配置的UART1的波特率,在VOFA上选择相同的波特率波特率一定要跟配置的一样,不然打印出来的就是乱码。
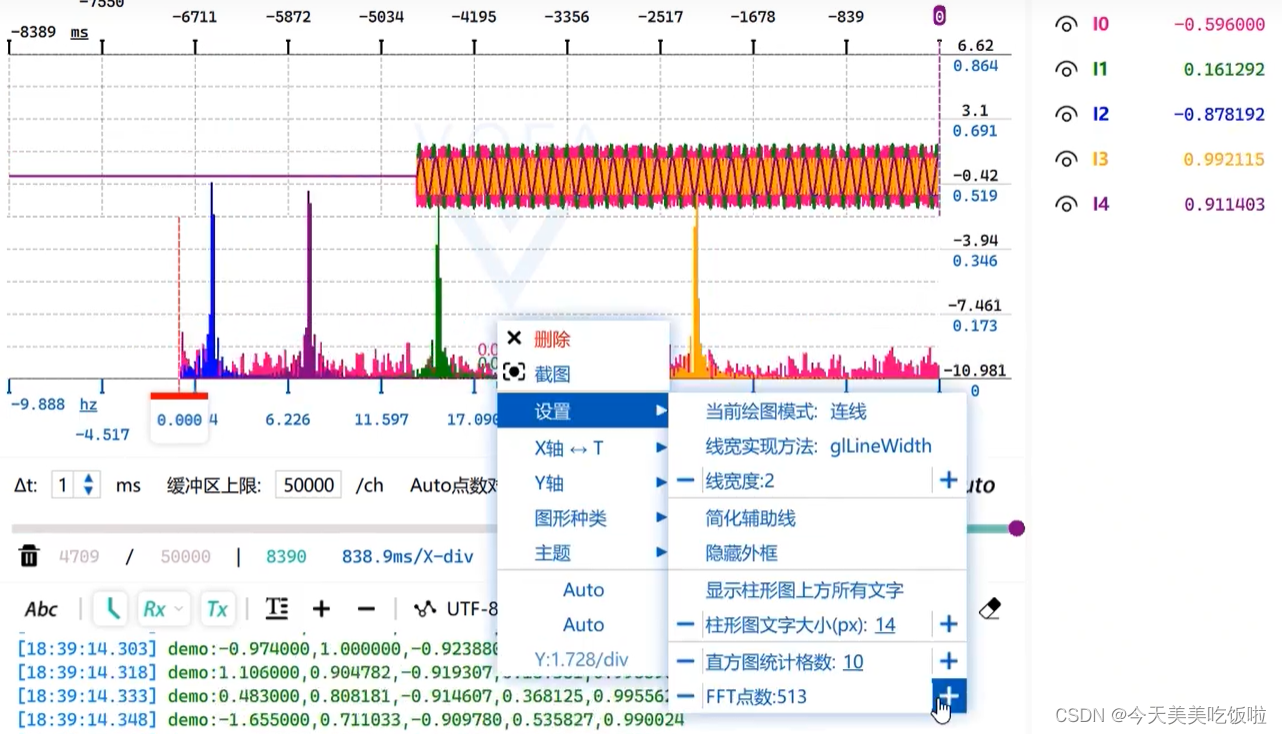
根据firewater的协议,打印你想要观察的数据
打印数据,printf函数我放在我的主函数里面的,整个文件贴上来了
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include "STC16f.h"
#include "intrins.h"#include "clk.h"
#include "led.h"
#include "timer.h"
#include "wake.h"
#include "pwm.h"
#include "uart.h"
#include "encoder.h"
#include "pid.h"
#include "math.h"int main()
{WTST = 0;EA = 1; // enable global InterruptP0M1 = 0x00; P0M0 = 0x00; //设置为准双向口P1M1 = 0x00; P1M0 = 0x00; //设置为准双向口P2M1 = 0x00; P2M0 = 0x00; //设置为准双向口P3M1 = 0x00; P3M0 = 0x00; //设置为准双向口P4M1 = 0x00; P4M0 = 0x00; //设置为准双向口P5M1 = 0x00; P5M0 = 0x00; //设置为准双向口P6M1 = 0x00; P6M0 = 0x00; //设置为准双向口P7M1 = 0x00; P7M0 = 0x00; //设置为准双向口Init_Clock(IRC24M);Init_UART1();Init_PID();Init_PWMA();Forward();Init_Encoder();Init_Timer0();LED_A_Off;LED_B_Off;// RSTCFG |= 1<<4; // 使P5.4管脚作复位脚while(1){static int t=0;t++;printf("%0.2f,%0.2f \r\n",pid_Speed.ReferenceValue,pid_Speed.ActualValue);}
}
注意printf()函数的写法必须跟协议的一样,数据中间不能再有其他的字符,不然只会打印数据,没有波形。
在vofa中选择控件,拖动坐标轴到旁边的tab框框里。
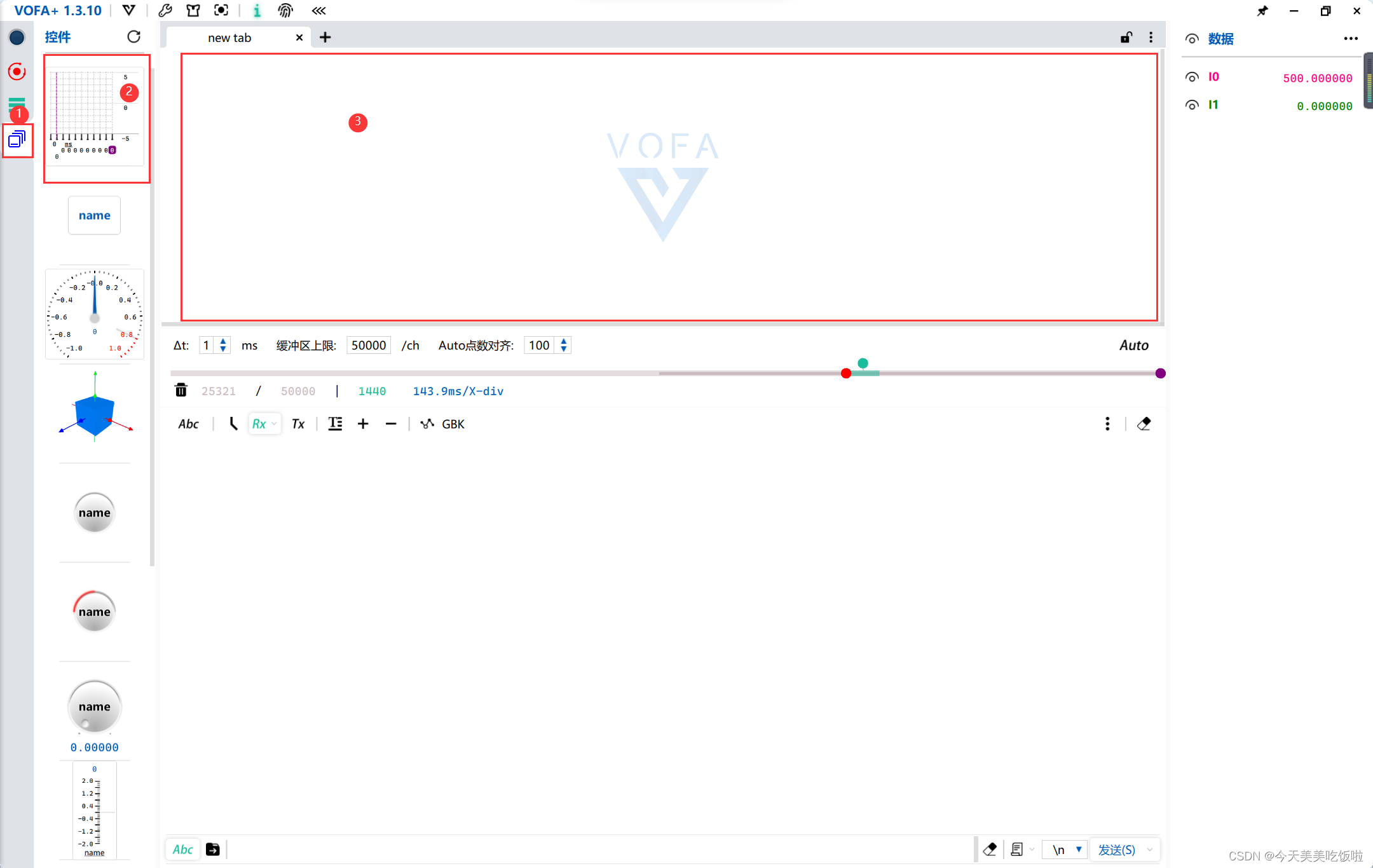
右键坐标轴填充
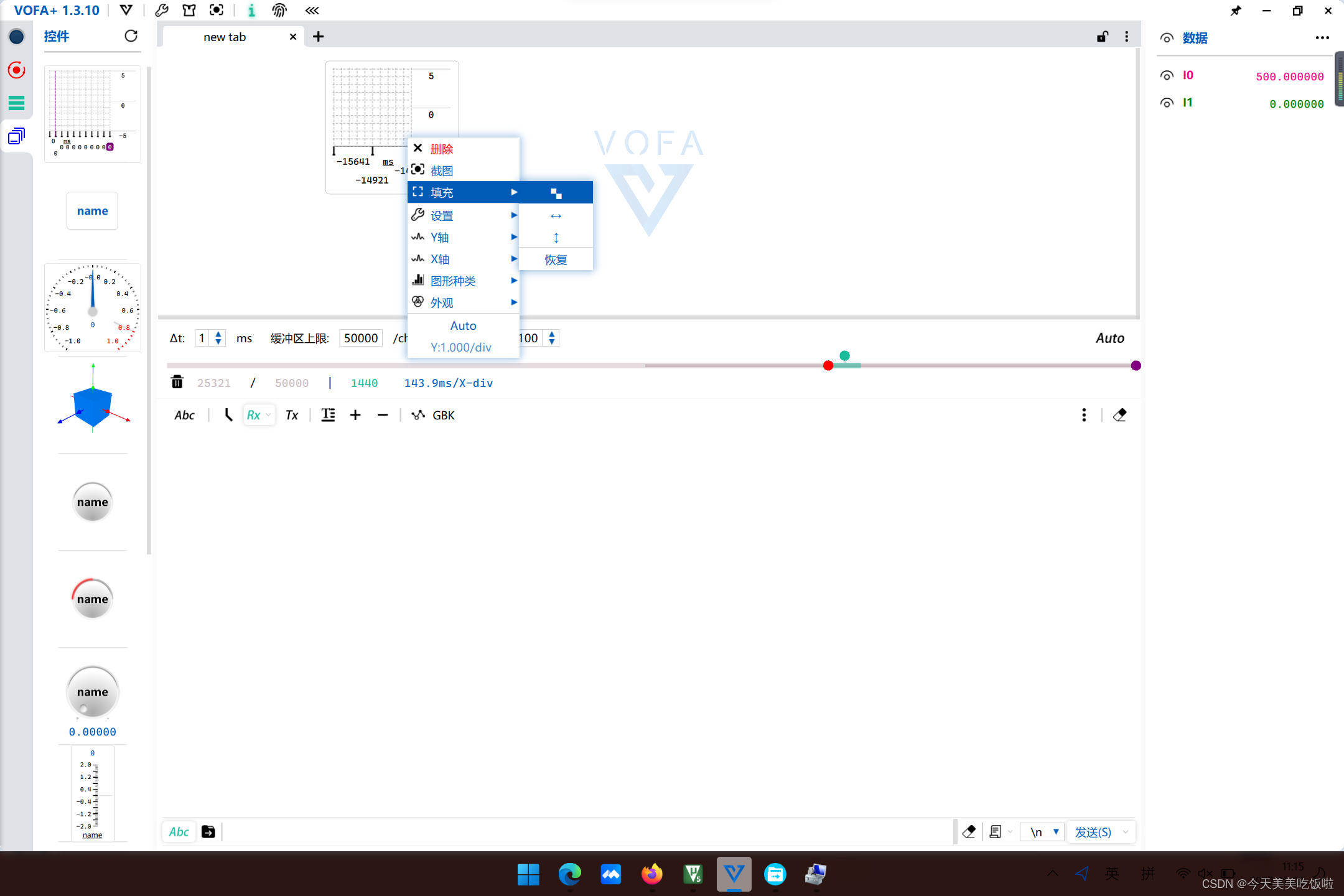
X轴选择时间轴,Y轴选择ALL


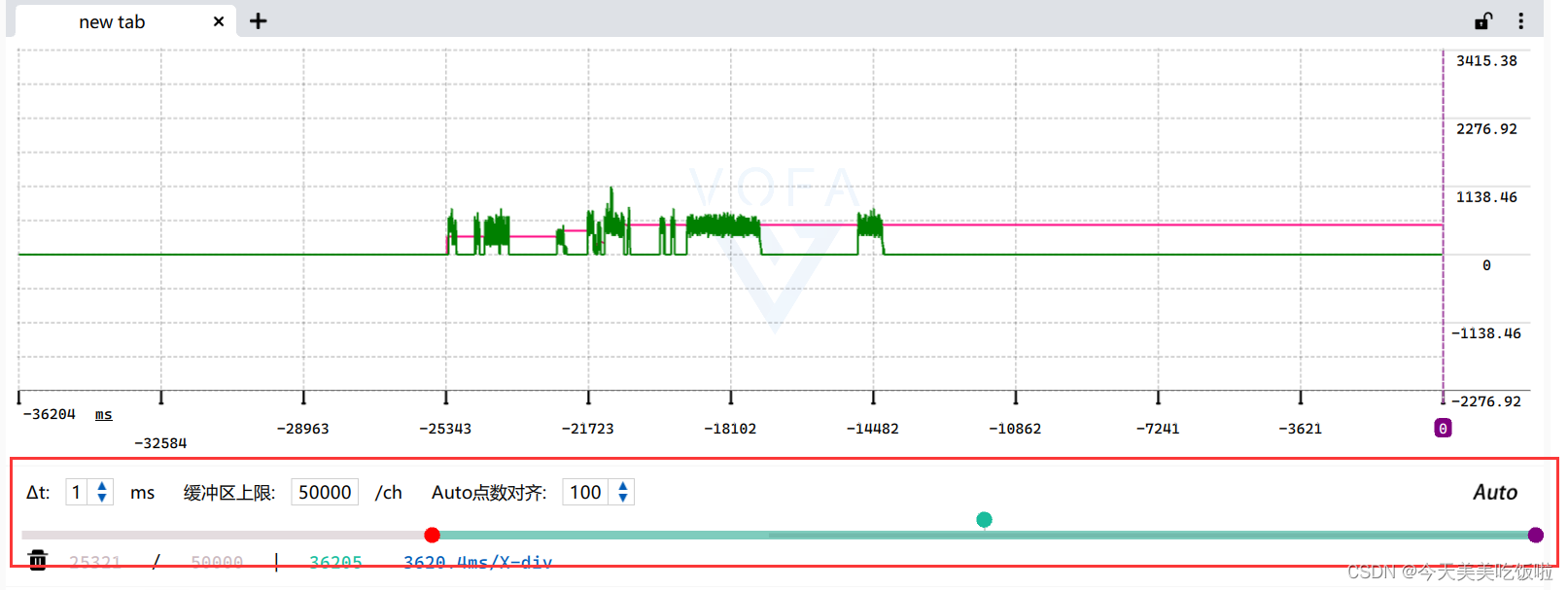
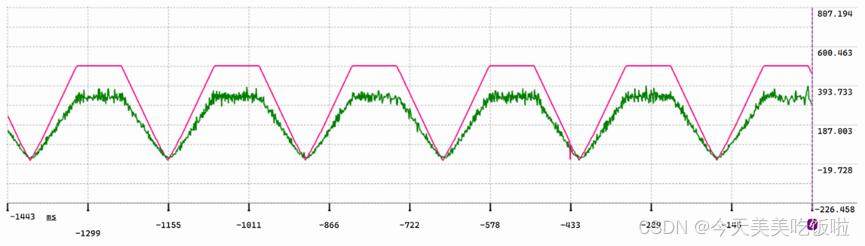
拖动下边的红色端子,就可以调节波形的刻度了
2022-12-07更新
最近准备智能车比赛已经换STC32芯片学习了,但最近也没有写博客。资源已上传到gitee开源
https://gitee.com/XuHaotianGaoHuizhen/STC32
这篇关于STC16f40k128 使用VOFA+进行电机PID参数整定的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





