推算专题

dr 航迹推算 知识介绍
DR(Dead Reckoning)航迹推算是一种在航海、航空、车辆导航等领域中广泛使用的技术,用于估算物体的位置。DR航迹推算主要通过已知的初始位置和运动参数(如速度、方向)来预测物体的当前位置。以下是 DR 航迹推算的详细知识介绍: 1. 基本概念 Dead Reckoning(DR): 定义:通过利用已知的当前位置、速度、方向和时间间隔,计算物体在下一时刻的位置。应用:用于导航和定位,

【PSINS】SINS与航位推算的EKF例程讲解|三维轨迹
文章目录 SINS与航位推算例程构造滤波前滤波主体滤波后处理 运行结果源代码 SINS与航位推算 SINS是捷联惯导,略。 航位推算: 本文讲解的程序是PSINS工具箱(相关文章:PSINS初学指导,https://blog.csdn.net/callmeup/article/details/136459824)的一个函数,在此基础上进行优化。如果要运行,需要先安装工具箱

如何刷题,如何用输入规模,反推算法
这个是最近看的花花视频截图,总结的很有道理,刷三遍,基本上无敌! 这是根据LC的TLE的特性,输入size反着推算应该是什么算法; 这个是分析记忆化搜索的算法复杂度思路

js从当前日期推算开始日期
在初始页面获取倒当前时间并向前推N天后作为起始时间 //推算时间 function date(){ var myDate = new Date(); //获取当前时间戳 var year =myDate.getFullYear(); //获取当前年 var month = myDate.getMonth()+1; //获取当前月 var day = myDate.ge

ATGM332D-F8S:高集成度单北斗多频车载航位推算模块规格书
车载航位 推算 模块 描述 : 是一种在车载导航系统中广泛应用的自主导航算法模块,主要用于弥补GPS或GNSS(全球导航卫星系统)在信号遮蔽环境下的定位不足。 车载航位推算模块通过收集来自车辆上各种传感器(如陀螺仪传感器、加速度计、速度脉冲传感器等)的信息,计算车辆的即时航向和行驶距离,从而推算出车辆当前的位置。这是一个信息累加的过程,依赖于车辆的初始位置和姿态信息。 ATGM332

【经典论文阅读1】FM模型——搜推算法里的瑞士军刀
全文由『说文科技』原创出品,文章同步更新于公众号『说文科技』。版权所有,翻版必究。 FM模型发表于2010年,它灵活好用且易部署。作者行文极其流畅,作者首先对要处理的问题进行介绍,接着作者提出FM模型,这个模型与SVM的关键区别在于FM模型在稀疏数据上具备更好的性能。FM模型的底层思想就是用特征向量(可以看出本文已经初步具备embedding的思想)的点积代替简单的权重从而得到更好的权重表示
![[原创]android资源xml颜色值进制推算](https://img-blog.csdnimg.cn/img_convert/b5ba7f08661d5655ab28e564ec72278d.png)
[原创]android资源xml颜色值进制推算
假设颜色值是25a3a9那么存储后显示的值是这样的 ,data——type_data image.png 那么用微软计算器表示 4280656809 则需要用32个以上的bite位表示,也就是无符号的就能表示, 而如果是在8位容量强制表示,则只能用负数表示了,那么是 -14310487 这里的推算得知,颜色存储实际上是存储了8位颜色,虽然反编译之后只看到了 25a3a9实际上是#

由数据范围反推算法时间复杂度
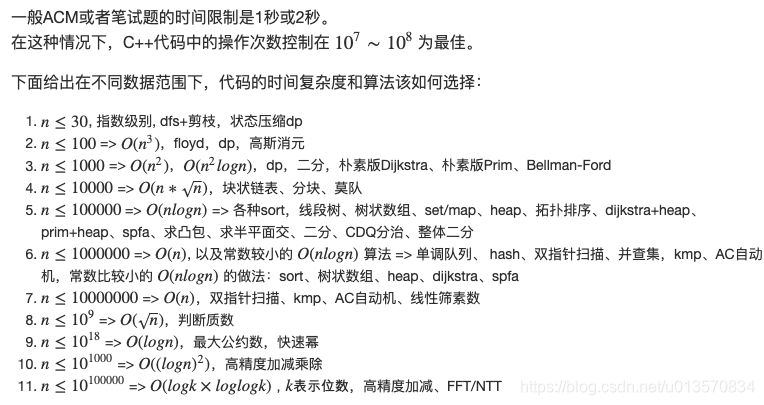
AcWing算法基础课 算法时间复杂度分析笔记 系列文章目录 常用算法代码模板 (1) :基础算法 常用算法代码模板 (2) :数据结构 常用算法代码模板 (3) :搜索与图论 常用算法代码模板 (4) :数学知识 算法基础课 动态规划模板题笔记 算法基础课 贪心算法模板题笔记 一般ACM或者笔试题的时间限制是1秒或2秒。在这种情况下,C++代码中的操作次数控制在 1 0 7 10
浮点数的各种最值推算以及对python sys.float_info的解释
目录 最大和最小的正规约数取值 最小和最大的正非规约数取值 浮点数能在该范围内精确表示的最大十进制整数 大于1的最小规约数和1之间的距离epsilon 对python sys.float_info的解释 本文将以64位浮点数为例,对64位浮点数的取值范围进行推算,并通过python的sys.float_info的信息,对其逐一解释,以对浮点数有一个更好的理解。本文需要
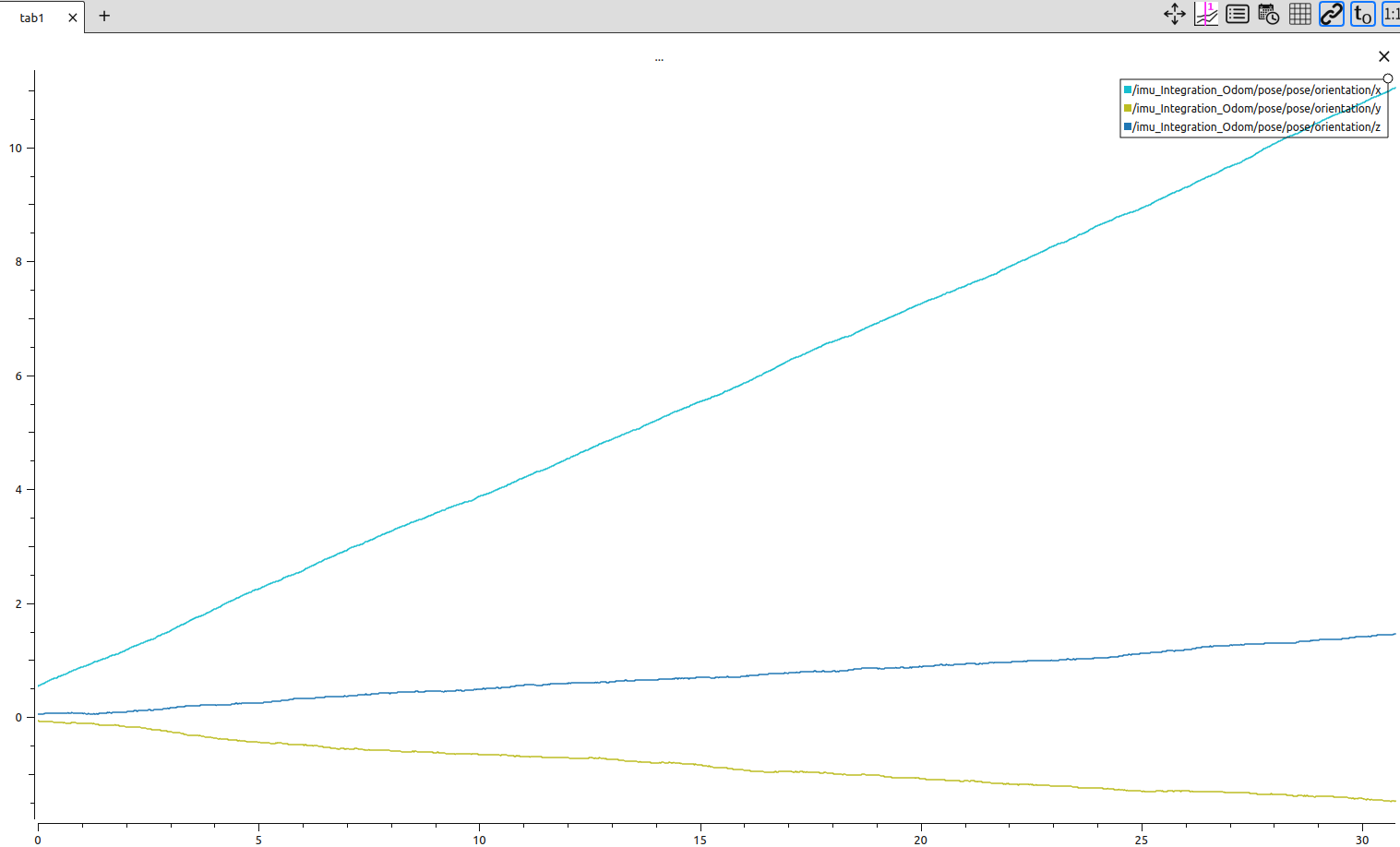
惯性导航 | 航迹推算与gazebo仿真
惯性导航 | 航迹推算与gazebo仿真 IMU数据进行短时间航迹推算代码gazebo中进行仿真测试 IMU数据进行短时间航迹推算 代码 声明一个用与 IMU积分的类 ,来实现 短时间内的航迹推算 类的名字叫 IMUIntegration 构造函数 有三个变量进行私有变量初始化 重力、初始陀螺仪零偏、初始加速度零偏。 class IMUIntegration {publi

JS中条形验证码与身份证号码最后一位的推算
13位条形验证码,根据前12位即可算出第13位,也可以由此来判断验证码的伪证性: 1.前12位中奇数位加和 2.前12位中偶数位加和 3.取 奇数位的和 与 偶数位的和的三倍 的个数位 4.用10减去上面的个数为 5.最后去上面数的个数位,即是第13位数字 18位身份证号,根据前17位即可算出第18位,也可以由此来判断身份证的伪证性: 1.把前17位乘以不同的
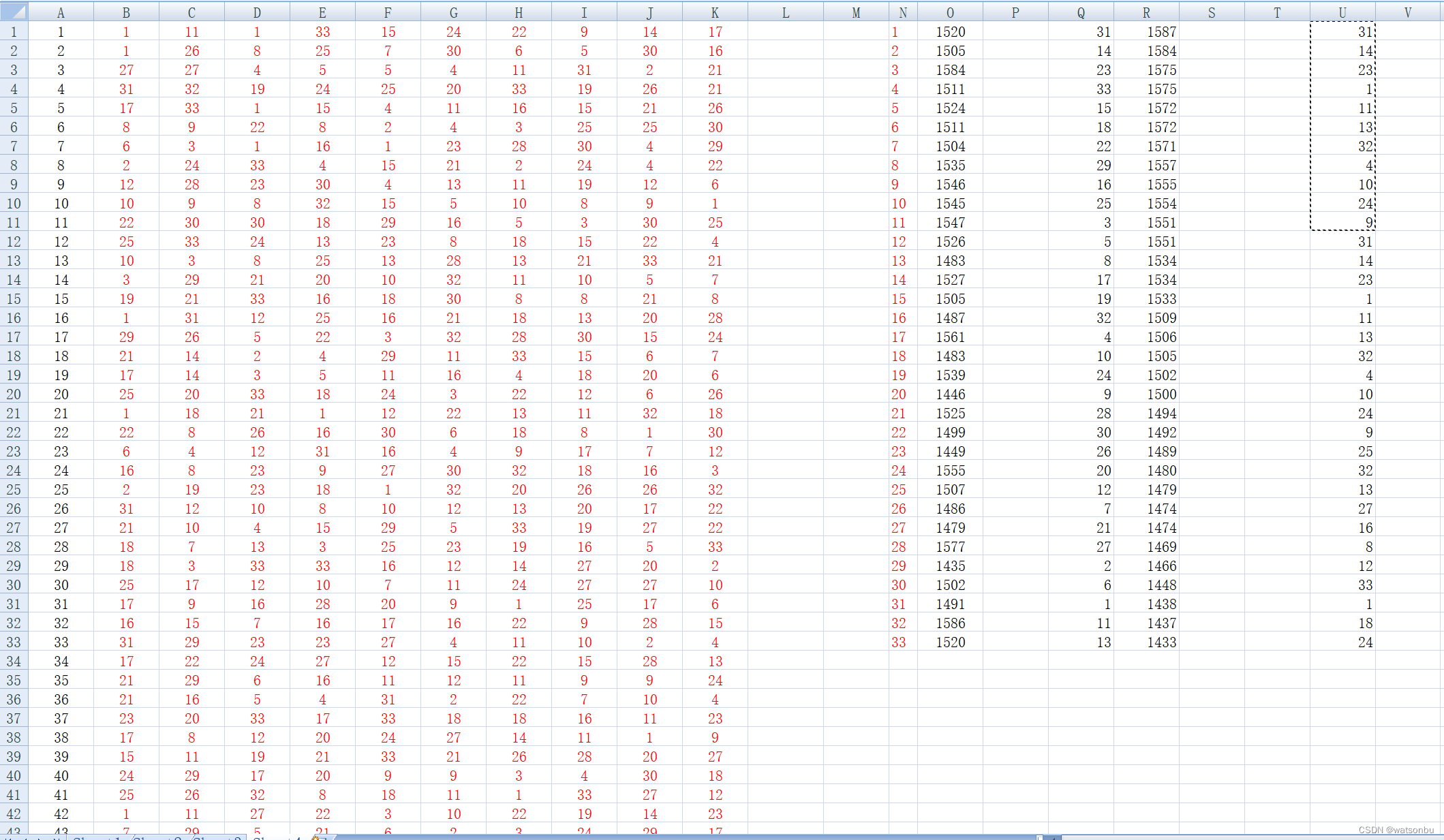
双色球预测算法,居于 EXCEL 宏的推算程序
预测原理: 每一注彩票的随机性,跟大自然中的随机事件或随机过程是一样的。每一天的随机性事件,在第二天看来都是已经发生了的,并且是固定的。 如果把彩票抽奖当天当作是第二天,那么彩票的号码是已经定下来的,而且无法更改。 如果每天的分分秒秒,无时无刻,都在随机出现一注彩票,那么当天一整天出现的所有彩票中,有一注彩票出现了很多次,即相同号码的一注彩票 出现了很多次,可以理解这就是那天最应该出现

洛谷C++简单题小练习day14—闰年推算小程序
day14--闰年推算小程序--2.18 习题概述 题目描述 输入 x,y,输出 [x,y] 区间中闰年个数,并在下一行输出所有闰年年份数字,使用空格隔开。 输入格式 输入两个正整数 x,y,以空格隔开。 输出格式 第一行输出一个正整数,表示 [x,y] 区间中闰年个数。 第二行输出若干个正整数,按照年份单调递增的顺序输出所有闰年年份数字。 代码部分 #include<b
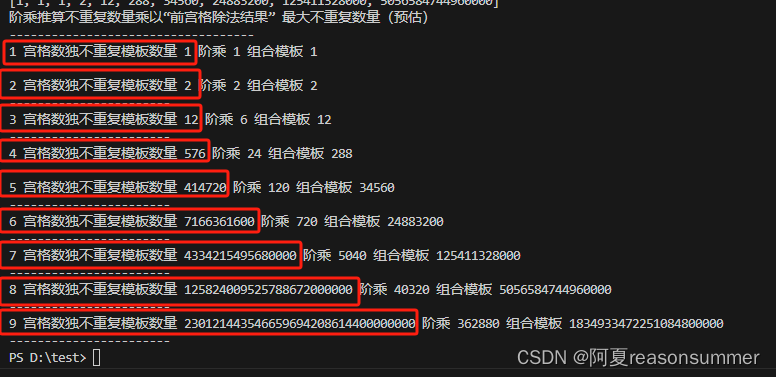
【教学类-43-16】 20240106 推算5-9宫格数独可能出现的不重复题量(N宫格数独模板数量的推算)
作品展示: 通过对各种已有结果的人工推算,目前得到两个结论 一、阶乘==基本样式的数量【【123】【321】【231】【132】【312】【312】】6组 结论:阶乘等于出现的基本样式数量 以下N*N格会出现的最大排序数量(比如包含333222111这种不符合数独规律的元素) '''目的:测试N宫格可以生成多少组基本样式(乘阶)[1,2,3,4,5][5,4,

基于车轮安装MEMS IMU的航迹推算算法研究
本文由来:前一篇文章“零速更新(ZUPT)辅助INS定位”,并通过开源方案ZUPT-aided-INS进行了算法验证。在验证过程中,意识到在进行多源传感器融合算法中,利用载体自身运动信息进行约束修正非常重要,因为这不需要额外增加传感器在现有系统上进行ZUPT/ZIHR,可以提高系统精度和鲁棒性,特别是在部分场景中多源传感器中部分传感器退化的情况下,在日常工作中也常称为“engineer trick
c++标准14取消decltype推算函数返回类型
Table of Contents 1. c++11之前不支持auto关键字2. c++11支持auto关键字 2.1. 但是不能自动推断函数返回类型2.2. 使用-> decltype来声明返回类型3. c++14让事情又回到简单
怎么推算max_step和epoch之间关系,例如多少step一个epoch
怎么推算max_step和epoch之间关系,例如多少step一个epoch max_step(最大训练步数)和 epoch(轮次)之间的关系取决于您的训练流程和超参数设置。通常情况下,一个step通常表示对一个batch的训练,而epoch则表示一次完整的数据集训练。因此,它们之间的关系可以用以下方式估算: max_step与epoch的关系:通常,您可以通过以下公式估算max_step与e

惯性室内导航入门到精通(1)-步行者航位推算
前言 之前使用rssi室内定位获得大致定位,这时候使用手机内置传感器进行惯性导航,进行综合定位,使定位更精确。 下一篇:惯性室内导航入门到精通(2)-移动平均法 点击:室内定位主页目录+一维实战+二维实战+安卓惯性导航基础 惯性导航概述 惯性导航是一种不借助外力(接收本体之外的信号)的自主性导航,你只要知道自己的初始位置,知道自己的初始朝向,知道自己每一时刻如何改变了朝向,知道自己每
根据传入时间推算半月时间段
主方法: /*** 推算4个 半月时间段** @param condition* @return*/public EvErpPFDemandQC getDateEvTimeRangeQC(EvErpPFDemandQC condition) {Calendar calendar = Calendar.getInstance();calendar.setTime(condition.getQue