手臂专题

pico手柄和人物模型手部旋转同步,实现手柄控制手臂手部位置移动、手部旋转和手指的操作了
这里的主要内容就是下述代码; // 获取左手控制器的旋转(四元数表示)Quaternion aRotationQuaternion = leftHandController.rotation;// 计算旋转差值(四元数表示)Quaternion rotationDifference = Quaternion.Euler(0, -90, -90);// 应用差值到左手控制器的旋转并获取新的四元数

论文速读|基于手臂约束的轮腿机器人运动操控课程学习
项目地址:Arm-Constrained Curriculum Learning for Loco-Manipulation of the Wheel-Legged Robot 本文提出了一种用于轮腿机器人局部操控的强化学习框架,使它们能够在高度动态的情况下执行一系列复杂的操作任务。通过引入臂约束网络和奖励感知课程学习方法,解决了引入机械臂带来的稳定性、安全性和效率挑战。仿真和真实机器人实验

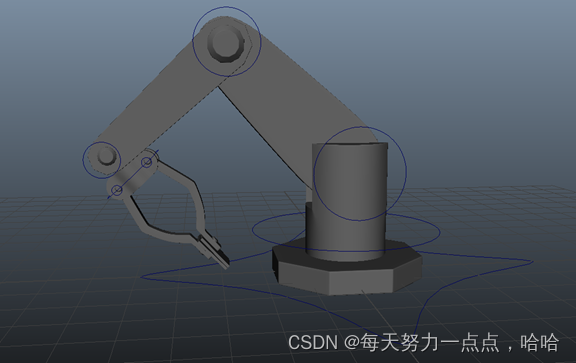
【嵌入式大赛应用赛道】机械手臂
电机 进步电机:它的转动是以确定的步数进行的,只要计算好脉冲数量和频率,就可以准确预测和控制电机的转动角度、速度以及停止的位置 伺服电机:将输入的电信号(如电压或电流指令)转换成轴上的精确旋转运动,包括转速和位置 先进电机技术——步进电机与伺服电机-CSDN博客 步进电机、伺服电机、舵机、无刷电机、有刷电机区别_舵机和电机-CSDN博客 CAN总线controller area ne

基于单片机的机械手臂控制系统设计
摘 要:在机械手臂控制系统设计中,运用单片机能增强机械手臂的使用性能。基于此,文章详细阐述了硬件系统设计、软件系统设计、系统调试这三个单片机机械手臂控制系统设计环节,深入分析了基于单片机控制系统的机械手臂设计,希望为机械自动化领域的发展提供助力。 关键词:机械手臂;仿真调试;单片机 单片机是一种具有中央处理器CPU、随机存储器RAM等多项功能的集成电路硅芯片,其在能效上相当于一个微型的计算机系统


三轴机械手臂定位坐标转脉冲基本原理(自学笔记,非专业性)
以下为本人自学时摸索的简单算法原理,可能缺乏一些专业性,一些地方可能存在问题,仅供查考,如果可以请多多指教,麻烦指出告知。 目的:将坐标转换成角度(角度可以根据脉冲比值,转换成脉冲) 基本数学原理:投影,cos求角公式,三角函数,三角形,二维坐标系等 如上图所示(图片比较简陋请见谅),上图为原先思考使用的综合图。a,b,c分别为机械手臂三轴的长度,a+b+c为机械手臂三轴总长度。 如图,O点位

龙芯机械手臂组装以及代码说明
开发环境:Linux(Ubuntu16.04)+ Python3 + flask + serial + putty 先附上龙芯机器人控制器的连线方法: 电源的规格:12V/3A 龙芯机器人控制电源板开关说明(红色接线那张图),左边的是舵机电源开关,右边是开发板的电源开关,推进去是打开开关。 注意,舵机的棕色线接GND。 图4 USB转TTL的线连接
观察级水下机器人使用系列之七机械手臂
本期是观察级水下机器人使用系列的最后一期,主要讲ROV所使用的机械臂。机械臂正式名称为5功能电动机械,型号为BE-500,由法国公司Ocean Innovation System设计的,可代替人工进行水下作业,完成海底样品采集、打捞、设备定位等任务。 机械臂的技术参数如下图,主要参数有抓取力,臂展和大小臂的旋转角度。 机械手的关节一般分为转动环节和移动关节,机械手通过各关节配合

【论文】:ALOHA双手远程操作手臂
对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务? 我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特

保安不慎将iPhone掉便池 立即去捞手臂被卡(图)
为了拾取落入厕所的手机,保安向师傅手臂被卡,消防前来救援 华龙网4月10日12时50分讯 清晨如厕,心爱的iPhone却不慎落入便池。情急之下,重庆江津的保安向某直接伸手去捞,不料却被便池卡住了手臂,动弹不得。同事闻讯前来帮忙也束手无策,最终还是消防官兵赶到,破拆了整个便池,才助其脱困。 说起今天上午的遭遇,保安向某还一肚子郁闷。清晨8时许,他带着心爱的iPhone4如厕,如同往常一
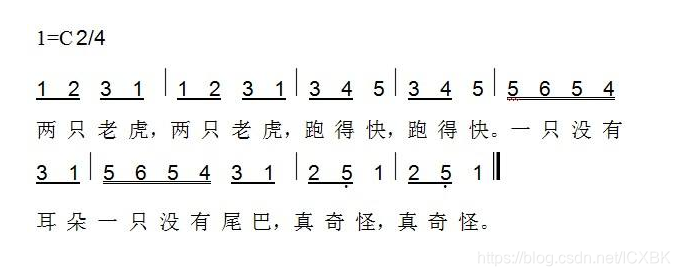
哄娃神器手势传感,挥舞手臂来个隔空指挥音乐
好烦,太多大人抱怨了,大家都抱怨小孩抱着手机不放,时间一久,弓了脊背,毁了视力。但是强制他们放弃手机,效果可能适得其反。所以就来个曲线救人。用另一个娱乐来引导他们减少手机娱乐。 刚一看到手势传感*(PAJ7620U2 手势识别传感器)可识手势达13种,哥就双眼放光,心跳加快,心想,就是它了。 具体要怎么操作呢,就是选择8种手势,分别用音符1234567i代表。这样就从理论上可以根据不同的音符

挥舞的手臂(mixly+二次开发)
从vb6到vb.net,一路c#, java, python, nn, c,对技术的切换早已经没有害怕的感觉了,一直有的是技术的热情和我所认为的技术信仰。 扯完,开始正文。 看看效果图: 使用的是Arduino UNO+16 Servo Drive Board+2个SG90舵机(左右手分别1个舵机摇摆) Arduino UNO: 16 Servo Drive Board 然后将这2块叠在一

工业机械手臂常识简介
机械手臂是一项比较新的产业,是二战后才真正兴起。一般常见的有四轴机械手臂和六轴机械手臂。六轴机械手臂有六个轴的运动。 一轴运动 五轴运动 六轴运动 一种以笛卡尔坐标系来表示,x,y,z,rx,ry,r

「游戏建模」教你如何快速用zbrush制作手臂上的拳击绷带
今天我们来看看如何利用Zbrush中的一些菜单命令来快速制作出缠绕在手臂上的拳击绷带。 01 我们使用Zbrush的遮罩工具在手臂上绘制出需要制作绷带的范围,注意遮罩工具的模式要切换到自由套索模式,绘制的区域包含了手指的一部分,那里也是绷带要绑住的位置。 02 使用Tool>Subtool>Extract工具将遮罩部分提取出来,注意提取的时候不要选择厚度,Thick厚度为0,这样才能

脑波控制的机械手臂:19岁少…
厉害 原文地址:脑波控制的机械手臂:19岁少年震惊全世界科技界 作者:寒门庶族 网易新闻 艺非凡编译整理自Google 03-04 为了7岁的残疾小女孩,装上了隐形的翅膀··· 科技鬼才Easton LaChappelle 伊斯顿·拉查佩尔, Technical Genius 他才19岁,便用一项发明震惊科技界。 这个高颜值与智慧并存的帅小伙, 成功研发

sql不等于0怎么表示_雄鹿0:3并不冤,送走布罗格登等于自断手臂,字母哥孤掌难鸣...
系列赛开始之前没有人会想到,东部第一的雄鹿会被东部第五的热火逼到如此的境地。0:3,在NBA历史上还没有翻盘的先例。雄鹿几乎铁定出局甚至会被横扫。 连续2个赛季,在常规赛无人可挡的雄鹿,在季后赛都没能走的更远。上赛季东决被猛龙淘汰,本赛季更是将要止步东部半决赛了。那么雄鹿究竟何至于此? 管理层昏聩,交易布罗格登,没有有效的替代者 去年夏天,雄鹿给了米德尔顿一份5年1.78亿的顶薪合同,这明

机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例
机器人学之运动学笔记【7】—— 机械手臂轨迹规划实例 1.任务描述2. 参数设定3. 方法一:以linear function with parabolic blends 在 Cartesian space 下规划轨迹3.1 步骤一3.2 步骤二3.3 步骤三3.4 步骤四3.5 步骤五 4. 方法二:以linear function with parabolic blends 在 Join