张正友专题
摄像机标定学习笔记(5) 关于张正友平面标定方法
张正友教授于1998年提出了单平面棋盘格的摄像机标定方法,是一种用来标定摄像机的一种灵活的新技术,这种方法只需要相机的很少位置(至少两个)观测平面,并且相机和平面都可以以未知的速度自由移动,这种方法灵活易用,推动了计算机视觉从实验室走向现实世界的关键一步。 1、算法描述 此标定方法简单实用,首先只需要打印一张模板并贴在一个平面上,用摄像机从不同的角度拍摄若干模板的图像,然后检测图
VMware虚拟机中ubuntu使用记录(6)—— 如何标定单目相机的内参(张正友标定法)
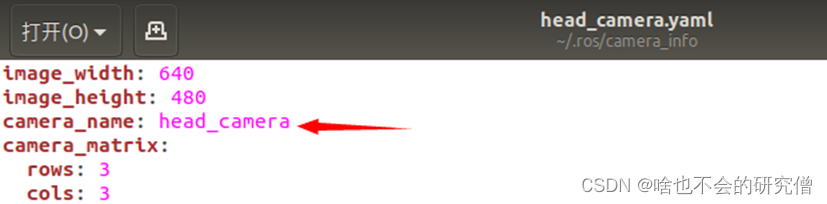
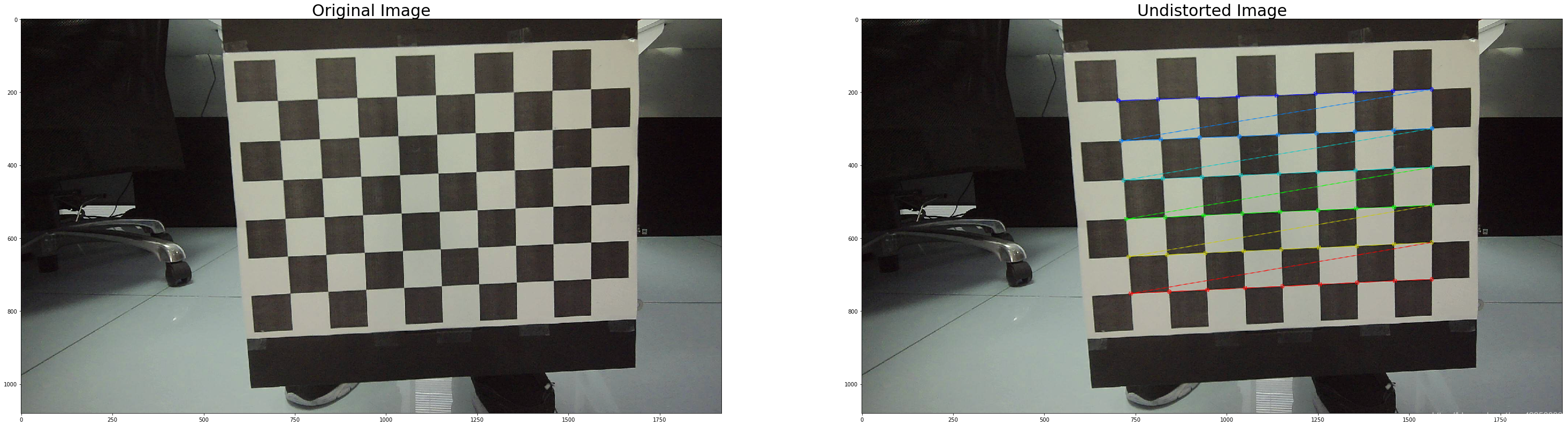
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、张正友相机标定法1. 工具的准备2. 标定的步骤(1) 启动相机(2) 启动标定程序(3) 标定过程的操作(5)可能的报错 3. 标定文件内容解析 前言 张正友相机标定法是一种通过测量相机拍摄棋盘格上的特征点来计算相机内参和畸变参数的方法。这种标定方法简单易行,能够帮助恢复真实世界中
最清晰的张正友标定法
此处“张正友标定”又称“张氏标定”,是指张正友教授于1998年提出的单平面棋盘格的摄像机标定方法。张氏标定法已经作为工具箱或封装好的函数被广泛应用。张氏标定的原文为“A Flexible New Technique forCamera Calibration”。此文中所提到的方法,为相机标定提供了很大便利,并且具有很高的精度。从此标定可以不需要特殊的标定物,只需要一张打印出来的棋盘格。So

腾讯张正友:攻克可进化机器人,6个研究趋势与7大技术突破点
11月2日,机器人及多媒体技术专家、腾讯Robotics X实验室主任张正友博士,在2018年腾讯全球合作伙伴大会的人工智能分论坛上,展示了腾讯在机器人领域的思考。包括: 腾讯将人工智能(AI)、机器人(RoBotics)和量子计算(Quantum Computing)作为全新ABC组合。人机共生的未来,是机器通过感知-行动-规划-学习范式,从自动走向自主,成为可进化的机器人的未来。目前

单目相机标定理论及张正友标定法总结
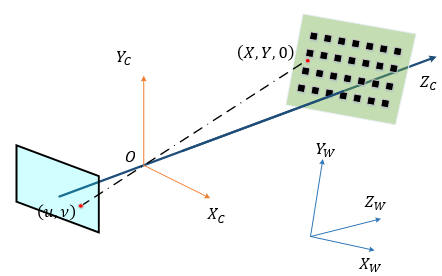
我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图,彩色图是RGB三通道,每个通道可以认为是一张灰度图,也就是三维场景经过广义的函数(相机)得到照片,函数(映射关系)是不可逆的,也就是说我们无法从二维照片恢复出三维世界,相机是物理模型很难用数学模型完全量化,所以我们就需要一个简

相机内参标定理论篇------张正友标定法
一、为什么做相机标定? 标定是为了得到相机坐标系下的点和图像像素点的映射关系,为摄影几何、计算机视觉等应用做准备。 二、为什么需要张正友标定法? 张正友标定法使手工标定相机成为可能,使相机标定不再需要精密的设备帮助。但内参标定的精度却需要依赖采集数据的质量。精度不如专业设备的结果,不过在日常科研等对精度要求不是非常高的领域足够满足。 三、为什么张正友使手工标定相机成为可能? 我们先思考一
张正友相机标定法原理与实现
张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。 传统标定法的的标定板

相机标定张正友、opencv和halcon对比(1)
本文将从基本标定开始,结合实际工作经验,分析张正友、opencv和halcon三者相机标定的深层原理与不同之处,内容比较多,如果出现错误请指正。 相机光学模型 我们使用的镜头都是由多组镜片组成,它实际上是一种厚透镜模型,但是目前所有的相机标定是基于针孔模型来进行标定的,因此在学习标定之前,首先我们要对相机进行建模,这样能从整体上把握坐标系之间的变换关系。当然鱼眼镜头和沙姆镜头需要基于针孔模型进

相机标定:张正友标定原理
本文来自公众号“AI大道理” —————— 计算机视觉的源头是相机,因此我们有必要对相机有所了解。 原始相机拍摄的图像一般都会有所畸变,导致画面和实际观测的有所排查,为了让相机拍摄的图像和肉眼观察的一致,就需要进行相机标定,获得相机参数,从而进行校正。 1、相机模型 相机是如何成像的? 光束从物体表面反射,经过相机镜头,到达感光原件,这一系列物理过程可以通过数学公

张正友标定方法标定精度评估
摘抄自matlab帮助文件 Evaluating the Accuracy of Single Camera Calibration- MATLAB & Simulink Overview Camera calibration is the process of estimating parameters of the camera using images of a special cal
鱼眼相机标定-基于张正友标定法
鱼眼相机标定 前段时间曾经做过一段时间的摄像头标定,这里对以前做的事情做一个总结。这里介绍一下鱼眼相机的标定吧,也是相机标定的第二部分,主要还是代码解析和一些细节说明,为了让自己更好的理解相机标定,标定目的是为了实现坐标转换,通过摄像头测定相机的内参和外参之后,需要基于公式得到精确的坐标转换矩阵。(涉及公司项目,这里就不贴图了) 思路详解 相机代码见 https://github.com/w

MATLAB张正友标记法对双目摄像头进行标定
第一步、安装MATLAB 我这里使用的版本是MATLAB R2016a 具体软件自己去度娘找哈 破解就花费了我大半天 第二步、去打印标定要用到的棋盘 这里可以给你(有点小水印无伤大雅) 用A4纸打印出来 第四步、主角—双目摄像头 奉劝大家不要贪小便宜哈,得买个一百来块的,要不然数据极度不准确,而且还难用 我买了这个,150 第五步、测试双目摄像头

张正友平面标定方法超级详细
张正友平面标定方法 原文https://blog.csdn.net/zkl99999/article/details/48372203转至本博客 利用摄像机所拍摄到的图像来还原空间中的物体。在这里,不妨假设摄像机所拍摄到的图像与三维空间中的物体之间存在以下一种简单的线性关系:[像]=M[物],这里,矩阵M可以看成是摄像机成像的几何模型。 M中的参数就是摄像机参数。通常,这些参