开山专题

【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory
【轨迹规划论文整理(1)】UAV轨迹规划的开山之作Minimum Snap Trajectory Generation and Control for Quadrotors 本系列主要是对精读的一些关于无人机、无人车的轨迹搜索论文的整理,包括了论文所拓展的其他一些算法的改进思路。 这是本系列的第一篇文章,也是UAV轨迹规划的开山之作,是所有学习无人机方向的需要精读的第一篇文章,两个作者来自于宾夕
详解FedAvg:联邦学习的开山之作
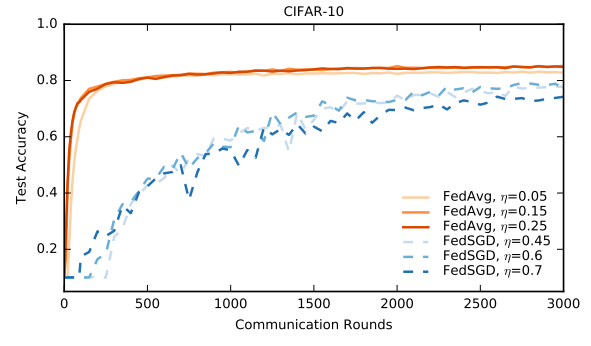
FedAvg:2017年 开山之作 论文地址:https://proceedings.mlr.press/v54/mcmahan17a/mcmahan17a.pdf 源码地址:https://github.com/shaoxiongji/federated-learning 针对的问题:移动设备中有大量的数据,但显然我们不能收集这些数据到云端以进行集中训练,所以引入了一种分布式的机器学习方法,即
EBR开山之作:Embedding-based Retrieval in Facebook Search
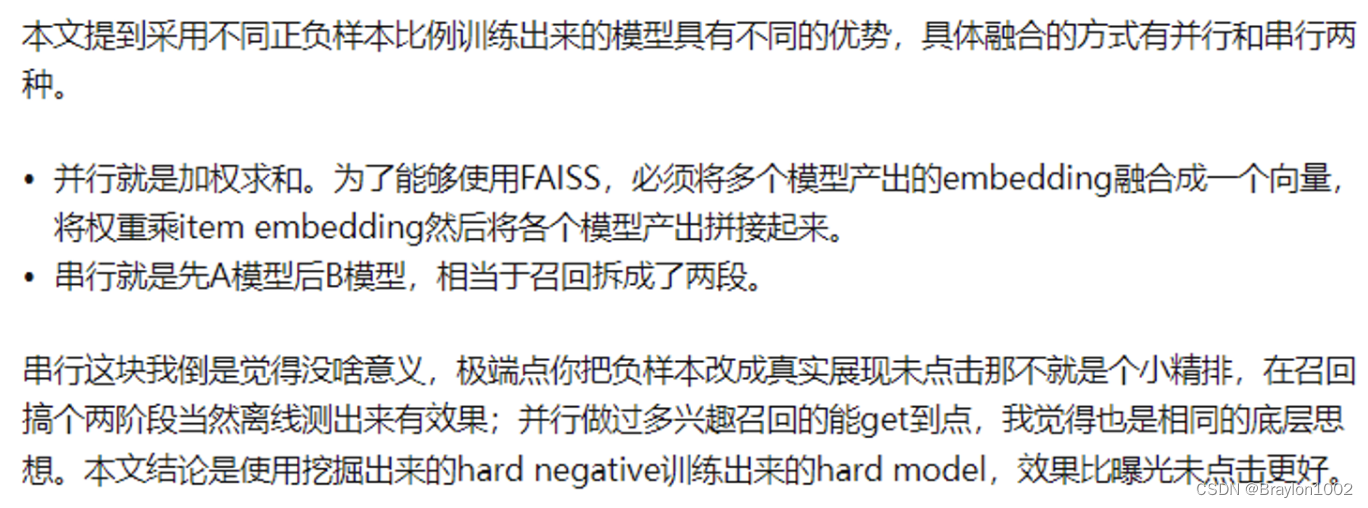
目录 简介1 模型2 特征3 索引4 全链路优化 简介 个人的随笔,读者需要基本了解IR领域的基本知识和概念,本文主要记录了我觉得该工作一些重要的点。和大家共勉。 1 模型 标准的双塔结构 1.1 损失函数 搜索相关性以pair-wise的形式进行建模,选择的是Triple loss形式: loss = max(0, sim(u, x_pos) - sim(u,
开山之作biubiubiu~
问题及代码: /* *Copyright (c) 2015,烟台大学计算机控制与工程学院 *All rights reserved. *文件名称:1.cpp *作者:张佳慧 *完成日期:2015年9月7日 *版本号:v1.0 * *问题描述:发表博文作为开山之作 *程序输出:输出一句话 */ #include<iostream> using namespace std; int main() {

Reentrantlock和其搭档Condition —————— 开开开山怪
Reentrantlock和其搭档Condition 这篇博客具体来说说Condition,但同时也离不开Reentrantlock,因为我们知道对于synchronize来说,是由Object类配合其进行使用,那么对于Reentrantlock来说则采用的Condition和其进行配合,但不同的是对于一个synchronize只拥有一个阻塞队列,就是我们平时new 一个Object对象,采用O

ThreadPoolExecutor线程池 —————— 开开开山怪
ThreadPoolExecutor线程池 说起线程池大家一定都不陌生,其实在很多地方都有应用。 当我们解释为什么使用线程池的时候,我们都会说线程池可以减少线程创建的开销,节省系统的资源。 但其实线程池真正做到我们说的那样,还和我们设置的参数有关。我们都知道在我们使用线程池的时候,开头要搞很多参数。 public ThreadPoolExecutor(int corePoolSize, i

Reentrantlock和背后金主AQS —————— 开开开山怪
1.Reentrantlock那些常用的方法 lock()方法 unlock()方法 lockInterruptibly()方法 2.等待队列图解 说起lock方法,其实lock() 和 unlock()相当于synchronize的左花括号和右花括号,但是当我们用到lock()的时候,需要手动的进行再合适的地方unlock()这样的话才能够释放锁,而synchronize到右花括号

采用JDBC解释java SPI机制和线程上下文类加载器 —————— 开开开山怪
采用JDBC解释JAVA SPI机制和线程上下文类加载器 SPI(Service Provider Interface)网上有关于SPI的解释,在这里我简单总结一下。 SPI机制可以做到将服务接口和真正的服务接口的实现类分开,可以增加程序的可扩展性,通过扫描规定的路径来进行实现类的获取,可以说是一种服务发现机制。 优点: 在面向对象的设计中,我们一般建议基于接口的编程,如果代码中涉及到具体的

HashMap源码解析JDK1.8 —————— 开开开山怪
hashMap源码解析 导航 1.hashMap的数据结构 2.影响hashmap性能因素 key的hash实现loadFactor的设定数组capacity的设定 3.hashmap的主要方法解析 put(K key, V value)get(Object key)resize()remove(Object key)containsKey(Object key) 正题 1.has

javaScript中原型和原型链的分析深究 —————— 开开开山怪
javaScript中原型和原型链的分析深究 建议阅读的时候配合第二幅图来阅读,可能会更清晰 1.原型与原型链的概念 原型: [prototype属性表示类与类之间的父子关系] 原型事实上是每个 函数或类 都拥有的一个 prototype 属性,这个属性事实上是一个指针,指向一个原型对象(原型对象是object,因为是对象,所有拥有__proto__属性),这个原型对象让我来说就是类或函数自
Spring内部原理模拟实现(一)—————— 开开开山怪
Spring模拟实现 引入 知道Spring框架的的人,应该对 IOC(控制反转) 和 DI (依赖注入)都有一定的认识。 IOC :IOC全称为“Inversion of Control”,即控制反转,不是一种技术,而是一种设计思想。在这种设计思想中,你设计好的对象交给容器管理,而不是在应用程序内部对对象进行管理。控制的含义是IOC容器控制了对象(也可以包括文件及其他外部资源);而反转的含

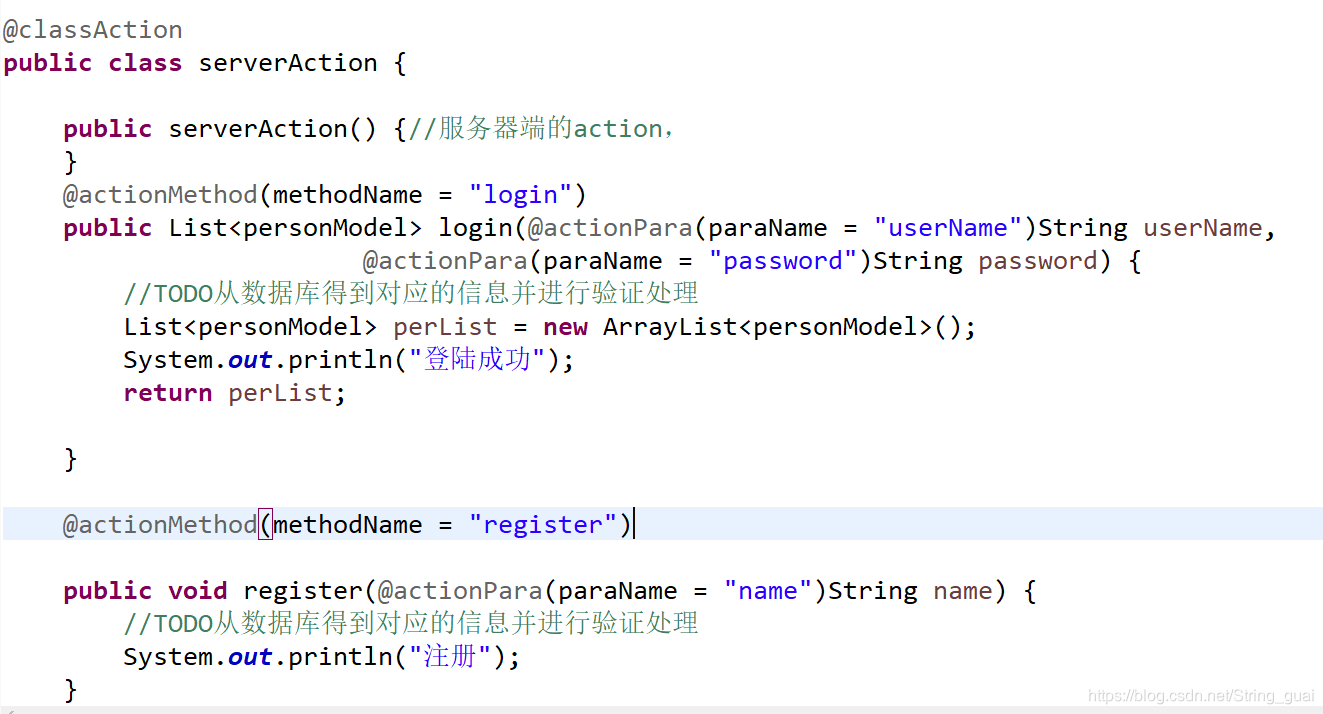
java分发器 及(注解 + 反射机制)—————— 开开开山怪
java分发器 及 (注解 + 反射机制) 引 入: 在C/S框架应用中,当应用层通过点击界面的按钮进行资源的请求的时候,请求的背后代码的实现实际上会自动构成一系列的requst信息请求,由C/S框架内部的communcation层进行消息的发送,服务器通过解析requst请求获取到action(希望服务器端做出的响应)来调用已经配置好的对应的action的方法来进行请求的响应工作,当然这些方
Google中Gson的巧妙使用 —————— 开开开山怪
Gson的使用 这篇相当于是一个分发器中的一个内容补充,但是同时也真正巧妙的使用了Gson这个强大的类。 首先说说这个Gson的类,类中的一个方法 toJson(Object)可以将一个任意类型转化为字符串。 并且还有另一个方法fromJson(String, Type),可以将一个字符串通过给出的类型转化成一个实例。 这对于我们分发器中参数 content 的包装和解析非常实用。 图一

java 包扫描 —————— 开开开山怪
包扫描 1.包扫描过程 包扫描事实上就是通过包名称来扫描到该包下该包下的文件夹下的所有class文件,为我们需要处理的.class文件提前提供一个获取.class文件的一个手段。 只需要提供该包的名称便可以扫描到包下所有的.class文件。而事实上包相当于文件夹。 那我们需要做的就是对提供的包名称进行处理,从而做一个工具可以自动扫描到该包下的所有类。 First : 通过包名称得到URL,
密码学开山篇——密码学的基本概念
文章目录 我国密码政策我国的密码分级我国商用密码政策 密码学的基本概念密码学的基本思想密码学的基本目标密码体制(CryptoSystem)的构成密码体制的分类从加密密钥与解密密钥是否相等来划分从密钥使用方式来划分从密码算法是否变化分从是否基于数学来划分 密码学的组成密码分析可破译与不可破译穷举攻击基于数学的分析基于非数学的分析根据占有的数据资源的分类仅知密文攻击(Ciphertext-onl

【AI】人工智能学习开山唠嗑篇(01)
讲个故事:很久很久以前,天和地还没有分开,宇宙混沌一片。有个叫盘古的巨人,在这个混沌的宇宙之中,他睡了一万八千年。有一天,盘古突然醒了。他见周围一片漆黑,他就抡起大斧头,朝眼前的黑暗猛劈... 盘古的天地劈开了,你们人工智能AI的天地也是时候打开了,啥时候打开,就看你啥时候醒。 以下言论,大家挑重点的看,属于一家之言,有对有错,但是对初学者来说,确实是字字箴
【扩散模型】2、DDPM | 去噪扩散概率模型开山之作
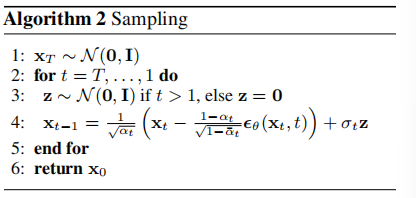
文章目录 数学基础知识一、背景二、DDPM 主要过程2.1 前向扩散过程2.2 逆向去噪过程2.3 训练和推理 论文:Denoising Diffusion Probabilistic Models 代码:https://github.com/hojonathanho/diffusion stable diffusion 代码实现:https://github.com/C

侠说java8-行为参数化(开山篇)
啥是行为参数化 行为参数化的本质是不执行复杂的代码块,让逻辑清晰可用。 相信使用过js的你肯定知道,js是可以传递函数的,而在java中也有类似的特性,那就是匿名函数。 理解:行为参数化是一种方法,可以接收多种不同行为作为其参数,并在内部使用它们来完成任务。 将公共的逻辑抽象 一个类几万行,遍地的if else,让人摸不着北,函数太长容易将众多的业务逻辑混杂到一起,一是可读性很差

Python3学习(2)-开山篇Hello World
一、Pyhon是什么? 一种面向对象、直译式计算机程序设计语言 二、Pyhon有什么特点? (1) Python 具有脚本语言中最丰富和强大的类库,足以支持绝大多数日常应用。 (1)Python语法简捷而清晰,具有丰富和强大的类库。 三、Pyhon能做什么? 数据分析、数据分析、数据分析。 以上摘自百度百科以及个人见
kubernetes开山篇(继续讲解vagrant)
kubernetes开山篇(继续讲解vagrant) 掐面楼主说了一点关于vagrant的东西,仅仅是皮毛,这里楼主继续使用windows来给大家讲解一下vagrant的东西,前面关于安装vagrant楼主就不多说了,创建一个工作目录这个也应该知道了.该工作目录中存放的是每个虚拟机的设置. 我们创建一个Vagrantfile的配置文件,来配置这个vm集群,这里

ubuntu20.04 nerf开山之作
源码 GitHub - yenchenlin/nerf-pytorch: A PyTorch implementation of NeRF (Neural Radiance Fields) that reproduces the results. 代码的相关解读 NeRF代码解读-相机参数与坐标系变换 - 知乎 原文题目:NeRF: Representing Scenes as Neura
开山之作 | YOLOv1算法超详细解析(包括诞生背景+论文解析+技术原理等)
前言:Hello大家好,我是小哥谈。目标检测是计算机视觉领域的一项重要研究方向,它在许多应用领域中都得到了广泛应用,如人脸识别、物体识别、自动驾驶、视频监控等。在过去,目标检测方法主要采用基于RCNN、Fast R-CNN等深度学习算法,这些方法虽然精度较高,但需要耗费很长时间进行计算,因此无法实现实时处理。而在2015年,Joseph Redmon等人设计了一种新的深度学习算法YOLO,这
开山之作 | YOLOv1算法超详细解析(包括诞生背景+论文解析+技术原理等)
前言:Hello大家好,我是小哥谈。目标检测是计算机视觉领域的一项重要研究方向,它在许多应用领域中都得到了广泛应用,如人脸识别、物体识别、自动驾驶、视频监控等。在过去,目标检测方法主要采用基于RCNN、Fast R-CNN等深度学习算法,这些方法虽然精度较高,但需要耗费很长时间进行计算,因此无法实现实时处理。而在2015年,Joseph Redmon等人设计了一种新的深度学习算法YOLO,这