库卡专题

Flutter-加三方库卡在flutter package get 的解决办法
Windows PUB_HOSTED_URL ===== https://pub.flutter-io.cnFLUTTER_STORAGE_BASE_URL ===== https://storage.flutter-io.cn 增加两个环境变量,然后执行一下 flutter doctor命令。问题完美解决。

Python | C# | MATLAB 库卡机器人微分运动学 | 欧拉-拉格朗日动力学 | 混合动力控制
🎯要点 🎯正向运动学几何矩阵,Python虚拟机器人模拟动画二连杆平面机械臂 | 🎯 逆向运动学几何矩阵,Python虚拟机器人模拟动画三连杆平面机械臂 | 🎯微分运动学数学形态,Python模拟近似结果 | 🎯欧拉-拉格朗日动力学数学形态,Python模拟机器人操纵器推导的运动方程有效性 | 🎯运动规划算法,Python虚拟机器人和摄像头模拟离线运动规划算法 | 🎯移动导航卡尔曼

库卡机器人的基本操作
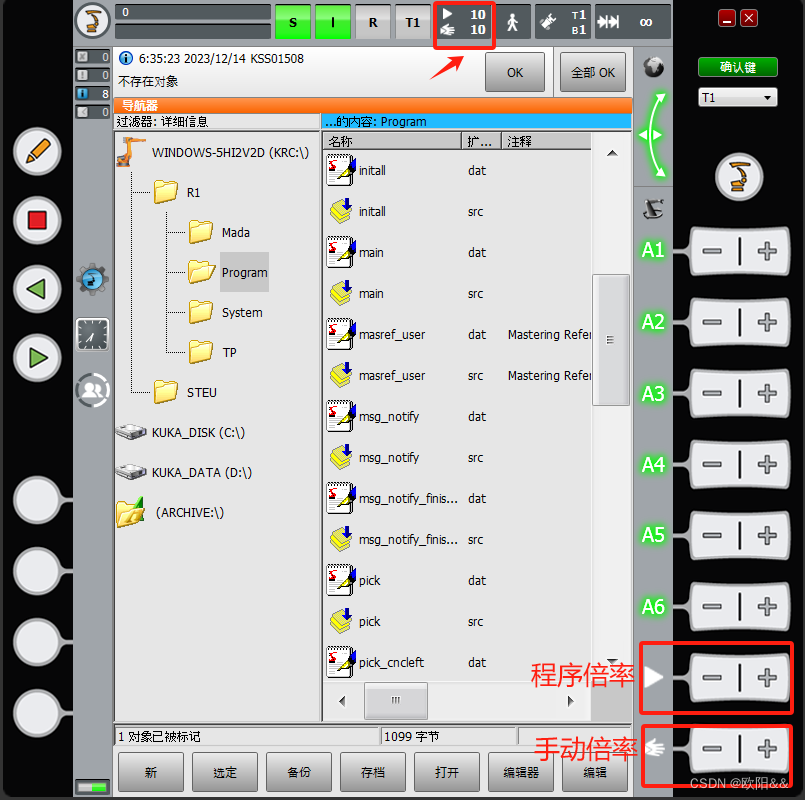
目录 1.示教器界面及功能键介绍 2.用户组切换 3.更换显示语言 4.数据备份及还原 5.显示当前实际位置 6.手动移动机器人(轴运行、基坐标运动) 7.运行速度倍率调整 本文讲解了新手对于库卡机器人的一些常用操作,希望能帮助新手快速入门库卡机器人的相关操作,可以通过目录导航到对应的内容。文章不足之处,还请大家指正。 1.示教器界面及功能键介绍 2.用户组切换
库卡机器人信息显示和按键选择
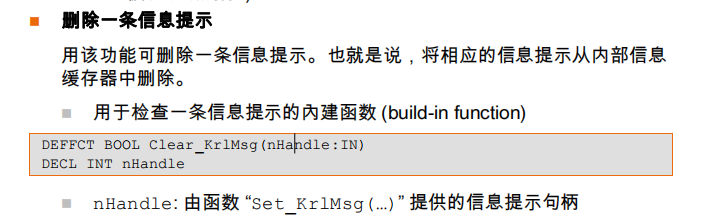
运行上面程序后会显示如下提示框 DECL KrlMsgDlgSK_T softkey[7]DECL KRLMSG_T MyMessageDECL EKRLMsgType TypeDECL int result1DECL KRLMSGOPT_T Myoptions1DECL KRLMSGPAR_T Para[3]DECL bool resultsoftkey[1] = {sk_ty
基于Matlab机器人系统工具箱(Robotics System Toolbox)对库卡LBR Med 7 R800进行建模分析(一)
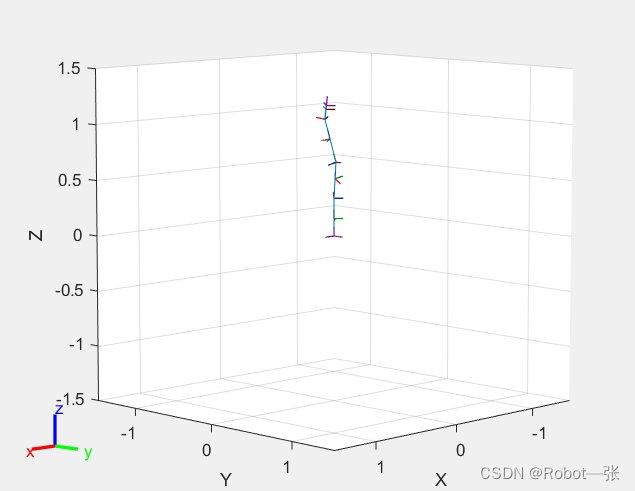
本文主要讲解利用机器人系统工具箱(Robotics System Toolbox)对库卡LBR Med 7 R800进行建模,以及利用模型对其进行正、逆解运算分析,库卡LBR Med 7 R800本体图如下: 首先利用Matlab机器人系统工具箱(Robotics System Toolbox)中的刚体树(rigidbodytree)对机器人进行建模,代码如下: %创建一个机器人刚体树对

库卡机器人提示无合适的mam文件处理
库卡机器人提示无mam文件多出现在老机械手,常年没有维护的机械手上。提示缺少该文件正常不会对机械手自动运行存在影响,但如果你要用EMD对机械手重新进行做零点矫正就不行了,只能做普通矫正。这时候该怎么处理呢?其实只要把该信号屏蔽就好了,具体操作如下。 先找到将库卡机械手切换到专家权限然后找到$machine.dat文件 然后打开该文件修改内部变量 具体位置如下图 修改完成后点击保存即可,最后重启机
1-库卡KRC2更改程序备份路径为U盘
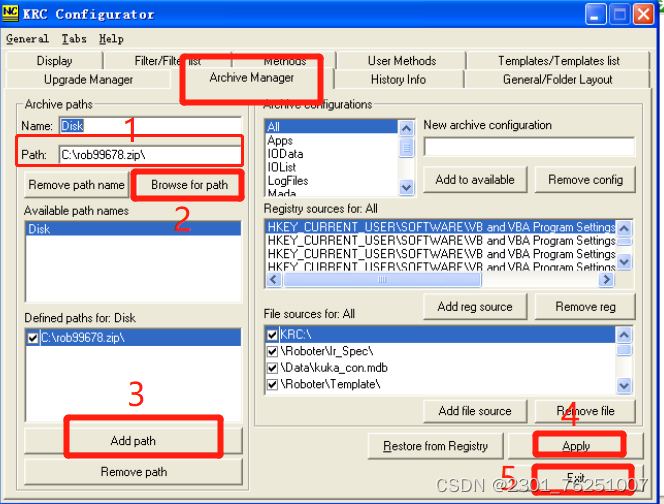
1、在机器人控制柜插入可识别的U盘,可以在左侧的目录栏看到有没有被识别 2、登录专家模式,用鼠标或者小键盘(ctrl+esc)进入Windows界面(尽量用鼠标) 3、去我的电脑>C>KRC>UTIL>KRCCONFIGURATOR,找到并执行 KrcConfigurator.exe 4、进入 archive manger 标签页 5、在 path 中添加需要的路径 先点击“R

库卡机器人镜像U盘损坏修复及系统镜像方法
KUKA 机器人系统U盘用着用着无法备份还原镜像、设置正确但只备份C盘数据如何修复? 镜像备份失败可以尝试将机器人设置为冷启动重新读入文件方式关机再操作,现场实测比休眠方式成功率高不少。(在官方文件中仅要求关机,启动方式并未做要求) 尝试一:将其他正常系统U盘内的所有文件复制到问题U盘内进行测试; 尝试二:运行GHOST软件插入正常系统优盘,Local-Disk-ToImage选择库卡系统,