带死区专题

带死区的PID控制算法
带死区的PID控制算法 带死区的PID控制算法: 注:本文内容摘自《先进PID控制MATLAB仿真(第4版)》刘金琨 编著,研读此书受益匪浅,感谢作者! 带死区的PID控制算法: 在计算机控制系统中,某些系统为了避免控制作用过于频繁,消除由于频繁动作所引起的震荡,可采用带死区的PID控制算法,控制算式为: e ( k ) = { 0 ∣ e ( k ) ∣ ≤ ∣ e 0
【正点原子STM32连载】 第二十三章 高级定时器互补输出带死区控制实验 摘自【正点原子】APM32E103最小系统板使用指南
1)实验平台:正点原子APM32E103最小系统板 2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420 3)全套实验源码+手册+视频下载地址: http://www.openedv.com/docs/boards/xiaoxitongban 第二十三章 高级定时器互补输出带死区控制实验 本章将介绍使用APM32E103输出带死区
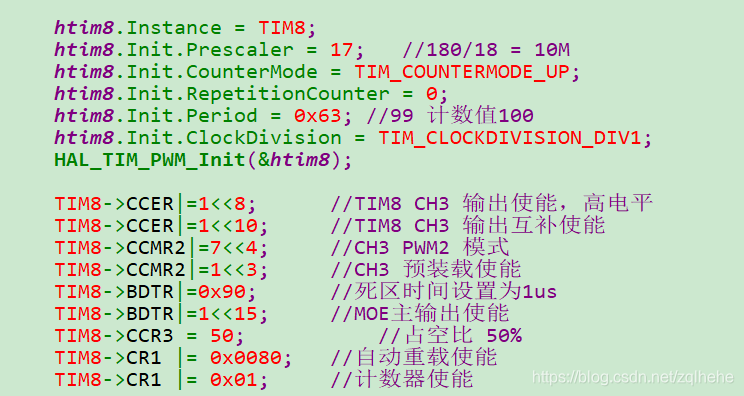
STM32 TIM1/TIM8 高级定时器输出带死区的互补PWM
STM32 芯片的TIM1和TIM8属于高级定时器,可以用于输出互补PWM. 本文使用的芯片是STM32F429,用TIM8 的CH3 输出互补PWM 下面是对应引脚及初始化 初始化引脚 定时器初始化 频率计算,计数时钟/计数值 如下 10M/100 = 100k 另外在前面的初始化使能端口和TIM8的时钟即可。

STM32-高级定时器互补输出带死区控制实验
实验要求为通过定时器1通道1输出频率为1kHz,占空比为70%的PWM输出,输出模式设置为PWM1模式。 使能互补输出死区控制:设置DTG=100;使能刹车功能,刹车输入信号高电平有效,配置输出空闲状态。 以1kHz为例的话,Tout=1ms=(ARR+1)*(PSC+1)/Ft(Ft=72M),则可得PSC=71,ARR=999。 由下图可知,PE9为TIM1_CH1的引脚口,PE8为TI