姿态控制专题
基于PID-bang-bang控制算法的卫星姿态控制matlab仿真
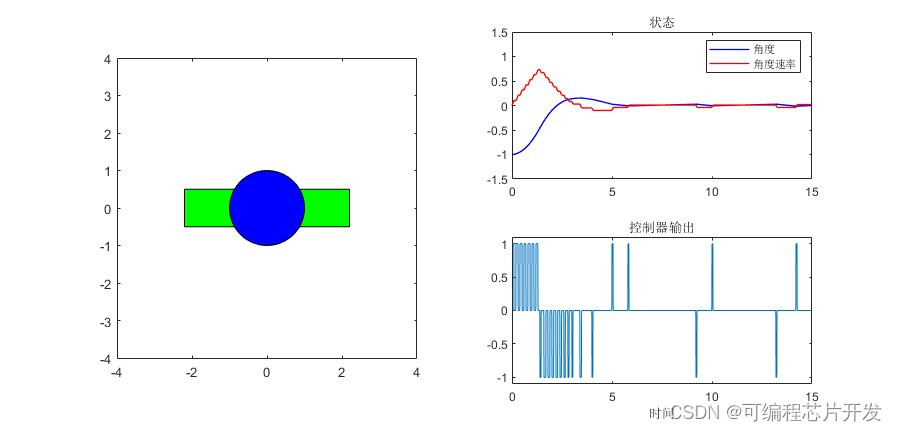
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于PID-bang-bang控制算法的卫星姿态控制。仿真输出控制器的控制收敛曲线,卫星姿态调整过程的动画。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a .................................

RflySim | 姿态控制器设计实验三
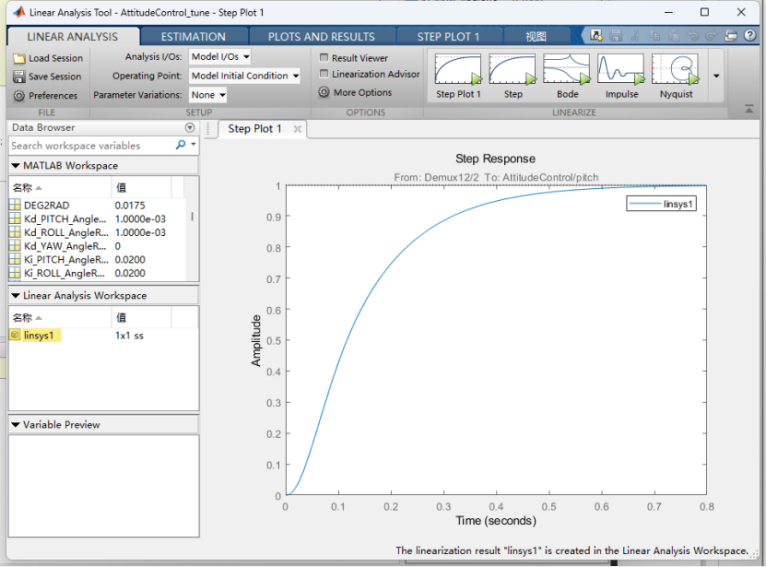
RflySim | 姿态控制器设计实验三 一.分析实验 1.调节PID控制器相关参数以改善控制性能并记录超调量和调节时间,得到一组恰当参数; 2.使用调试后的参数,对系统进行扫频以绘制Bode图,观察系统幅频响应,相频响应曲线,分析其稳定裕度; 本实验对应demo文件RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightContr
RflySim | 姿态控制器设计实验二
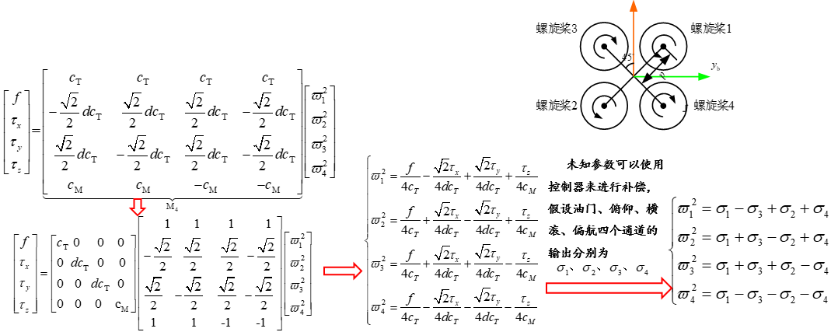
本实验的目的是让多旋翼的姿态能够跟随我们给定的期望姿态,姿态控制器的好坏直接决定了多旋翼能否平稳飞行。 RflySim| 姿态控制器设计实验二 01 基础实验 1.复现四旋翼飞行器的Simulink仿真,分析控制分配器的作用; 2.记录姿态的阶跃响应,并对开环姿态控制系统进行扫频以绘制Bode图,分析闭环姿态控制系统的稳定裕度; 3.完成四旋翼硬件在环仿真; 本实验对应de
RflySim | 姿态控制器设计实验一
姿态控制器设计实验1 一. 姿态控制设计简介 本文是建立在多旋翼的姿态即控制器中的反馈信号能够被较好地估计的前提下,控制器中的反馈信号是估计值。不过,为了更加简便根据分离原理,我们用真值代替反馈信号。本文的目的是让多旋翼的姿态能够跟随我们给定的期望姿态,姿态控制器的好坏直接决定了多旋翼能否平稳飞行。在时域中,能够反映控制性能的有响应时间、超调量、调节时间和稳态误差等指标;在频域中是稳定
【空心杯四旋翼TinyLeaf】姿态控制入门
家父昨日已经取消休假返回医院工作,望所有医护人员平安归来!武汉加油,中国加油! ——2020.1.27 目录 什么是控制 什么是闭环控制 姿态控制的目的

云台/稳定器/无人机姿态控制之欧拉角与四元数控制优缺点分析
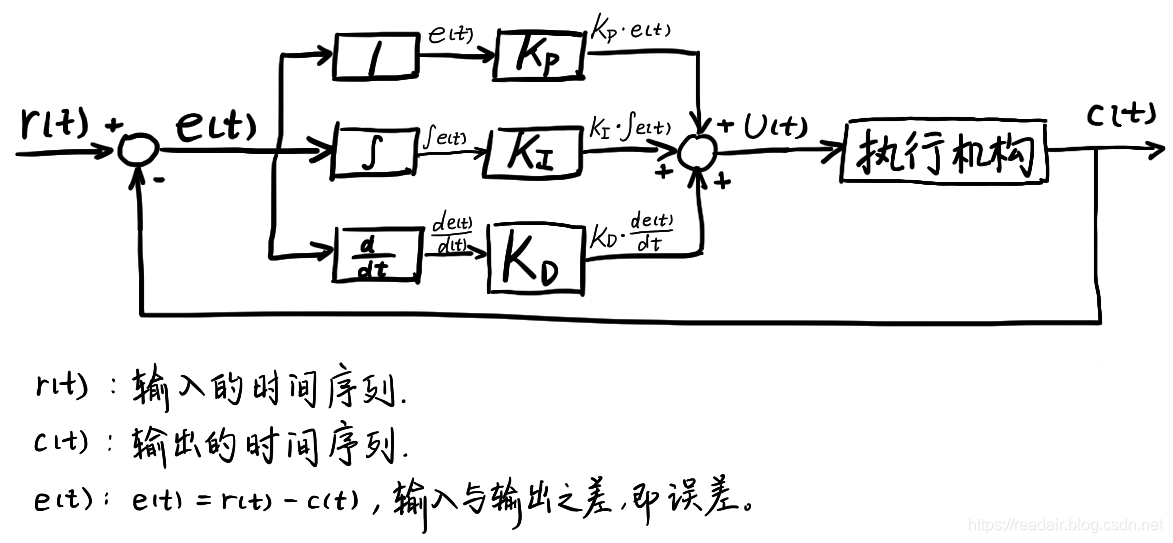
基于欧拉角的姿态控制简述: 通过陀螺仪数据解算出姿态:pitch,roll,yaw(相对航向),根据目标 姿态:dst_pitch,dst_roll,dst_yaw计算出误差姿态pitch_err,roll_err,yaw_err。将误差姿态转换为目标速度e_pitch_rate,e_roll_rate,e_yaw_rate。然后再做坐标转换,变成基于机体坐标系的目标转速b_pi

云台/稳定器/无人机姿态控制之欧拉角与四元数控制优缺点分析
基于欧拉角的姿态控制简述: 通过陀螺仪数据解算出姿态:pitch,roll,yaw(相对航向),根据目标 姿态:dst_pitch,dst_roll,dst_yaw计算出误差姿态pitch_err,roll_err,yaw_err。将误差姿态转换为目标速度e_pitch_rate,e_roll_rate,e_yaw_rate。然后再做坐标转换,变成基于机体坐标系的目标转速b_pi
从飞机姿态控制看线性变换的本质
战斗机做机动动作的时候经常会执行偏航,俯仰和翻滚等动作,用来改变飞机的运行轨迹,这里面也蕴含了丰富的线性空间变换的思想和应用。本篇文章试图用线性代数的理论来解释这些操作具体是怎么做的,当然,同样的解释也可以用在机器人,机械手臂的运动上面。 方便起见,将坐标系选在飞机上,假定飞机处于平面,机头指向轴的正方向,左机翼指向轴的正向,飞机在平面飞行,轴定义在飞行平面的法线方向,机头上面为正。如下图所示: