本文主要是介绍【空心杯四旋翼TinyLeaf】姿态控制入门,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
家父昨日已经取消休假返回医院工作,望所有医护人员平安归来!武汉加油,中国加油!
——2020.1.27
目录
什么是控制
什么是闭环控制
姿态控制的目的
PID算法简介
航向控制
本文将结合PID控制算法介绍四旋翼姿态环的闭环控制思想和算法。
-
什么是控制
控制是一个宽泛的概念,笔者对控制的理解是“让被控制对象按照期望运行”,下文也将按照此思想论述。
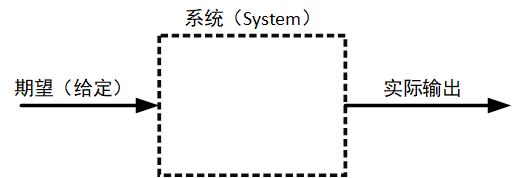
如上图所示,控制的作用就是让被控对象的实际输出尽量符合期望/给定(给定:控制论术语,即期望的输出数据,比如“控温空调设定在26℃”,这里的“26℃”就是给定),期望可以是单个或多个,输出也可以是单个或多个。期望和实际输出之间的差值叫做误差。控制的意义就在于让误差及时的收敛。
实现让输出跟随给定的算法叫做控制算法。控制算法有很多种,PID算法是一种非常经典的控制算法,也是本文着重介绍的算法,此外,还有诸如滑模控制(SMC),自抗扰控制(ADRC)等控制算法等。
-
什么是闭环控制
闭环和开环相对,他们的差别是:闭环控制会采集被控对象的被控输出和期望比较,并通过一些算法对控制器修正,从而使输出更接近给定。在控制框图上,实际输出会返回到被控对象执行机构的控制量之前,以某种形式参与被控对象执行机构的控制量的计算,使得控制框图出现一个环,这就是闭环控制的由来。一般来说,只有闭环控制可以实现无误差的控制,并具有良好的抗干扰性能;开环控制一般做不到无误差控制(步进电机的控制是一个特例)。
PID算法就是一种经典的闭环控制算法:

-
姿态控制的目的
姿态控制是四旋翼飞行器控制的基础。没有控制好飞行器的姿态,飞行器就会变成一颗“布朗运动弹”,后续的高度控制,航线控制也就无从谈起。
通常,我们常用欧拉角来描述飞行器的姿态。关于欧拉角的介绍,可以看我先前的博文【空心杯四旋翼TinyLeaf】四旋翼基础。欧拉角包括横滚(roll)、俯仰(pitch)、航向(yaw),航向比较特殊,笔者会在本文下方另开一章介绍。
显而易见,四旋翼在水平情况(四个旋翼轴向与地面垂直)下,升力和重力在一条直线上,也只有这个时候,随着升力的加大,四旋翼得以垂直起飞。当飞机倾斜时,总升力F的垂直分力与重力相抵消,总升力F的水平分力
为四旋翼提供了一个水平方向的加速度。这个加速度为我们后续的位置控制提供了帮助。

因此,我们把水平情况下的姿态定为零点,也就是俯仰角为零,横滚角为零。姿态控制的目的是让四旋翼保持水平,也就是让四旋翼的姿态服从给定(给定为零点),让俯仰Pitch和横滚Roll去跟踪给定零点(Pitch = 0;Roll = 0)。这就是四旋翼的姿态控制。
-
PID算法简介
首先亮出PID的公式:

PID分别代表了比例(Proportion)、积分(Integration)、微分(Differentiation)三个环节(忘记微积分的同学需要复习一下高等数学)。
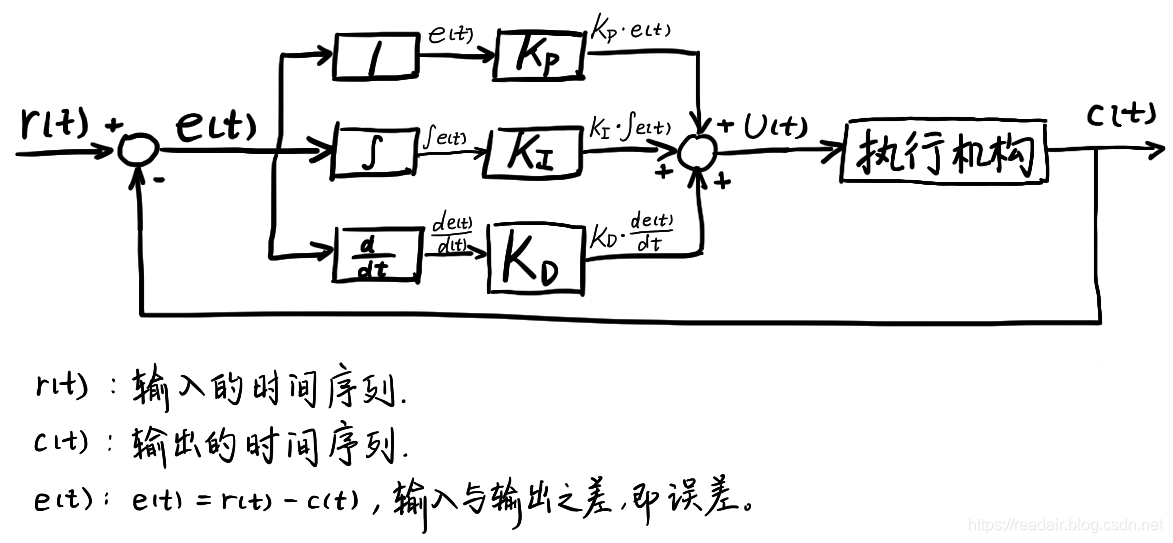
上方的框图我为了符合公式的写法,作的是时域框图,所以在积分环节和微分环节那,就只好用一个计算符号来表示环节这样不正规的做法了。大家在书本上或论文中,主要用的都是频域框图,那样更加准确。
PID算法的实质,就是通过误差e(t)来调节执行机构的控制量 u(t)。
控制量u(t)由比例、积分、微分三个部分构成:
- 比例:输出和误差成正比,系数是 Kp,比例项没有滞后,误差越大,比例项提供的修正量越大;
- 积分:输出和误差的积分程成正比,系数是 Ki,积分项对误差响应有滞后,同向误差持续存在时间越长,积分项提供的修正量越大;
- 微分:输出和误差的微分(导数)成正比,系数是 Kd,微分项对误差响应有提前,误差的变化程度越剧烈,微分项提供的修正量越大。
从上面的框图我们可以看到,如果输入和输出一致
c(t) = r(t)
那么误差就为0
e(t) = r(t) - c(t) = 0
如果误差、误差的积分、误差的微分(导数)都为0,这么U(t)也就为0,即执行器不会动作。这点很好理解:输出已经和所希望的一致了,自然就不需要动作了,只有输出和期望出现了偏差(误差e(t)),执行器才会动作以消除偏差。
关于PID算法的详细介绍我将在之后新开一篇博客介绍。
-
航向控制
之所以要把航向控制取出来特别讲,是因为航向的控制有多种方式,也涉及到四旋翼的飞行模式。俯仰、横滚轴的控制参数是基本一致的,它们决定了飞行器与水平面的夹角。在整定好俯仰轴的PID参数后,这套参数可以照搬到横滚轴。而航向则比较特殊,航向轴的变化不影响飞行器与水平面的夹角。
笔者刚开始写四旋翼飞控的时候,对于航向轴的闭环是和控制俯仰,横滚轴类似的:给定水平时的初始方向为零点。然后就发现了一个问题:四旋翼起飞时机头朝南,我使用遥控器打航向左转。机头朝东。遥控器航向归中,机头又自动回到了朝南。这就和笔者玩的穿越机不太一样了(正常应该是打方向旋转,归中就停在当前角度)。为什么呢?实际上,大多数四旋翼对航向轴采取的是角速度闭环,也就是说,给定是角速度为0而不是角度为0。
-
PID的参数整定
一直以来,PID的参数整定对于很多人来说都是一个老大难问题。笔者在开始学习自抗扰控制前,控制一直使用的是PID算法,包括四旋翼,倾转翼,动量轮,倒立摆,风力摆,平衡车等等。在这些系统的控制中,笔者总结了一些调试PID参数的技巧和注意点,这部分内容会在我讲述PID算法的专门博文中介绍,在此只介绍一些四旋翼飞行器控制的相关的技巧。
我知道很多人写代码都是CtrlCVer,不过笔者还是建议初学PID的朋友,按照公式自己写一些,这对于理解PID的算法有很多好处。
在四旋翼的的姿态控制中,PID正常情况下起作用的主要是比例和微分,也就是PD控制。
为什么积分环节一般不常用呢?主要是两个原因,一个是积分的作用总是非常迟缓,而四旋翼的姿态控制对快速性的要求很高,另一方面,积分环节的作用主要是消除静差,而姿态环很少出现静差,出现静差说明你的四旋翼出现了一些问题,有可能是陀螺仪的安装固定出现的明显的倾斜,或者四旋翼的重心没有与合升力在一条直线上(重力和升力不是共点力,就会产生力矩,这就是静差的来源)。
对于姿态环的参数整定,笔者的建议是:
- 先调一个轴,先调节比例系数Kp,即纯P控制,从小往大调节,调节到四旋翼可以自己恢复到平衡点但不至于产生振荡。
- 然后将Kp置0,调节微分系数Kd,这个的感觉需要自己拿捏,不同的机型参数差异比较大。这个参数也是从小往大调节,微分是抑制高频扰动的,什么属于高频扰动?用杆子捅一下四旋翼,对四旋翼产生的扰动就属于高频扰动,Kd的调节因性能要求而异,唯一的要求是不能出现自激振荡(在扰动后自己产生的振荡也算是自激振荡)。
- 调到自己觉得满意之后。再使用PD控制,注意要让之前的Kd稍微减小一些,建议将系数乘以0.7~0.95。然后开始综合调节,视情况在加上一些积分作用(Ki)。
语言总是无力的,纸上得来终觉浅,绝知此事要躬行。有条件的朋友,建议准备一个调试架。
笔者能力有限,错漏之处在所难免,如有错误,可在下方评论指出,也可邮箱交流:read_air@163.com。
码字不易,给个赞可好?
这篇关于【空心杯四旋翼TinyLeaf】姿态控制入门的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









