本文主要是介绍RflySim | 姿态控制器设计实验三,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
RflySim | 姿态控制器设计实验三
一.分析实验
1.调节PID控制器相关参数以改善控制性能并记录超调量和调节时间,得到一组恰当参数;
2.使用调试后的参数,对系统进行扫频以绘制Bode图,观察系统幅频响应,相频响应曲线,分析其稳定裕度;
本实验对应demo文件RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e5-AttitudeCtrl\e5.2;
对于RflySim v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e5-AttitudeCtrl\e5.2;
打开软件,在MATLAB中打开e5-AttitudeCtrl\e5.2\Init_control.m文件,调节如下俯仰角的 PID 参数。
ModelInitPosE=[0,0,-100];
ModelInitVelB=[0,0,0];
ModelInitAngEuler=[0,0,0];
ModelInitRateB=[0,0,0];
ModelInitRPM=557.1420;
运行Init_control.m文件,"e5-AttitudeCtrl\e5.2\AttitudeControl_tune.slx"文件自动打开。
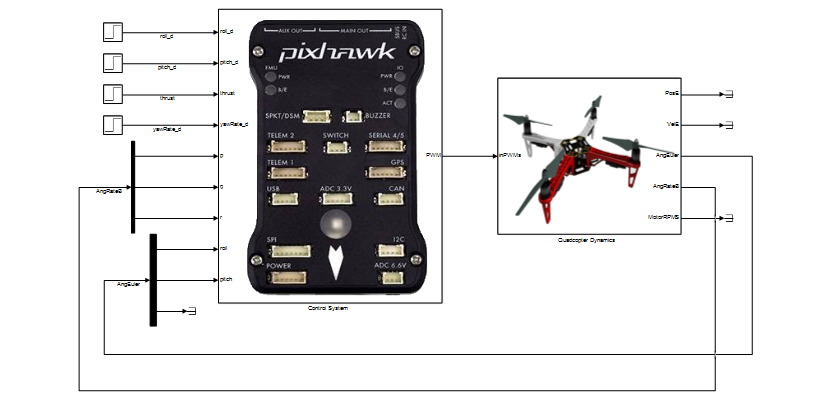
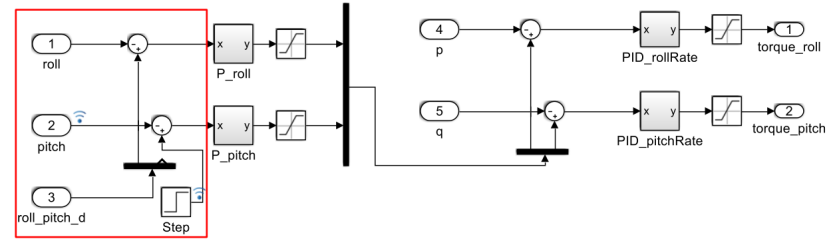
在“AttitudeControl_tune.slx”中找到AttitudeControl_tune/Control System/AttitudeControl子模块。将期望角速度换成阶跃输入,并将“q”信号线(对应角速度)和阶跃信号线设置为“Enable Data Logging”来得到阶跃响应曲线。

修改文件“Init control.m”中角速度控制环的 PID 参数。首先将积分项和微分项参数设置为 0。
调整比例项参数(“Kp_PITCH_AngleRate”),并每次修改后运行文件“Init control.m”。
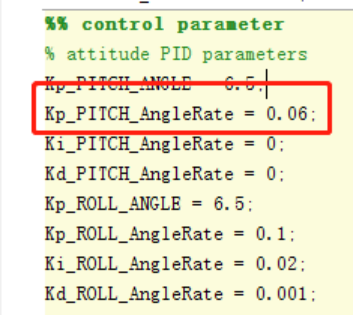
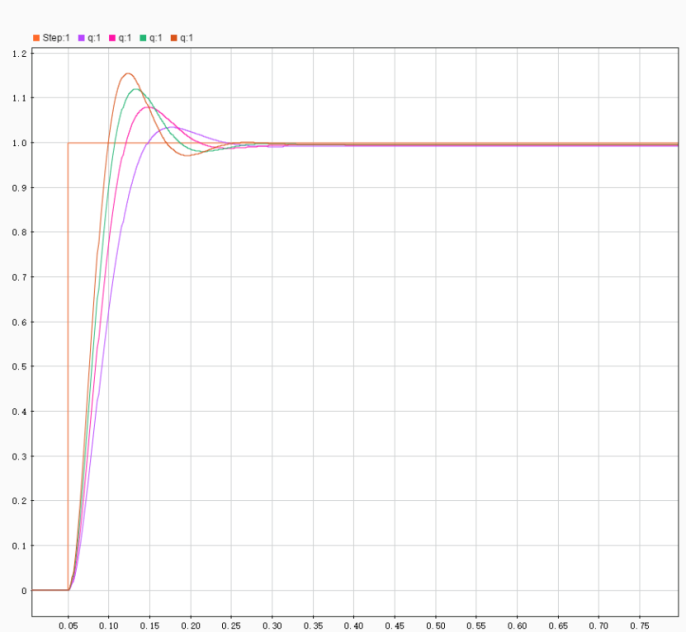
设定合适的仿真时间后点击 Simulink 的“Run”按钮,在“Simulaion Data Inspector”中查看输入和输出(如下图)。调试过程中逐渐增大比例项参数,这对应于文件“Init control.m”中的“Kp_PITCH_AngleRate”变量增加。
采用上一步所得到的角速度环参数, 调节角度环比例项系数。将期望俯仰角换成阶跃输入,并将阶跃输入和期望角实际输出设置为 “ Enable Data Logging”。
由小增大外环比例项参数,在“Simulation Data Inspector”中观察阶跃响应。

再进一步微调比例项参数得到最终的响应曲线。
Kp_RP_ANGLE =16;
设定信号输入输出点。将期望俯仰角输入线设为“Open-loop Input” ,俯仰角的实际输出设置为“ Open-loop Output”。扫频得到Bode图。
RflySim | 姿态控制器设计实验四
二. 设计实验
1.建立姿态控制通道的传递函数模型,设计校正控制器,使得姿态角速度环稳态误差,相位裕度>65°,截至频率>10rad/s;
2.姿态角度环截至频率>5rad/s,相位裕度>60°;使用自己设计的控制器进行硬件在环仿真实验;
本实验对应demo文件对于RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e5-AttitudeCtrl\e5.3;对于RflySim
v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e5-AttitudeCtrl\e5.3。
首先只对一个通道进行分析,这里选择俯仰角通道,简化后的模型如下图所示(运行"e5-AttitudeCtrl\PID-Config\e5.3\tune\Init_control.m"打开)。

输入为期望角速度,输出为实际角速度,设置输入输出点如图所示。

生成 Bode 图后 ,在左侧 Linear Analysis Workspace中会出现linsys1变量,按图示操作即可得到传递函数模型。
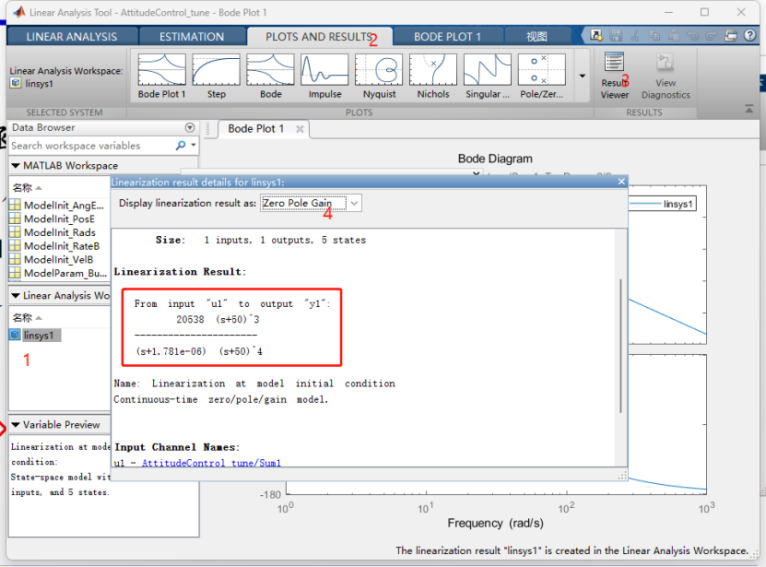
生成Bode图后,在左侧Linear Analysis Workspace中会出现linsys1变量,按图示操作即可得到传递函数模型。

首先根据稳态误差调整开环增益。未加校正时,系统在r(t)= t作用下的稳态误差,可由终值定理求出。

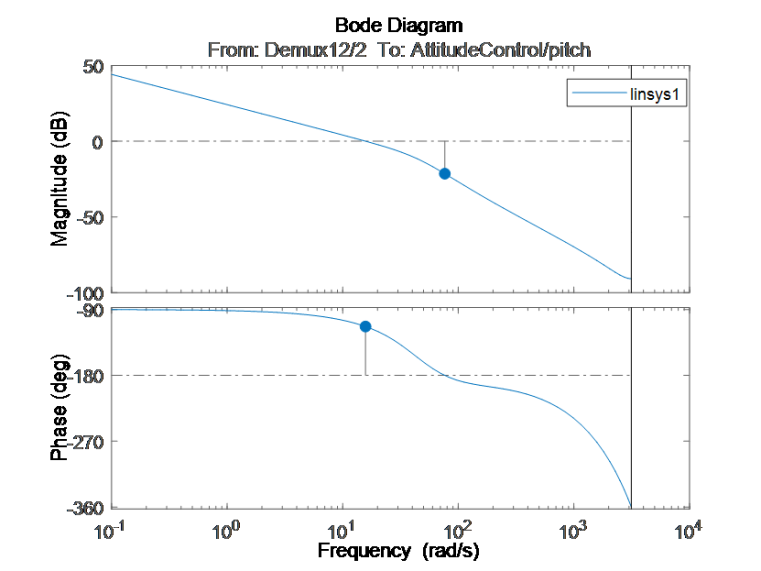
因此要 erss≤0.01,就有K≥100。现在K=410.76 已经大于100,故无需调整。做出未校正系统的Bode图,如图
稳定裕度γ=19.8°不符合要求。考虑使用相位滞后校正,这样既可以使相位裕度达到要求,又能提高系统对高频干扰的抑制能力。考虑设置截止频率在 ɷʹ=12.9rad/s处,由Bode图可知该频率下相位裕度为76度,符合要求,并由Bode图幅频特性曲线得知该频率下幅度响应为29.8dB。
在ɷʹc处,要求加入校正后幅频特性为0dB,根据滞后校正环节幅频特性得到

得b=0.0324。为了使滞后校正部分的相位滞后特性对ɷʹc处影响不大,所以校正环节的转折频率(bT)-1应设在远离ɷʹc十倍频程的地方,即:

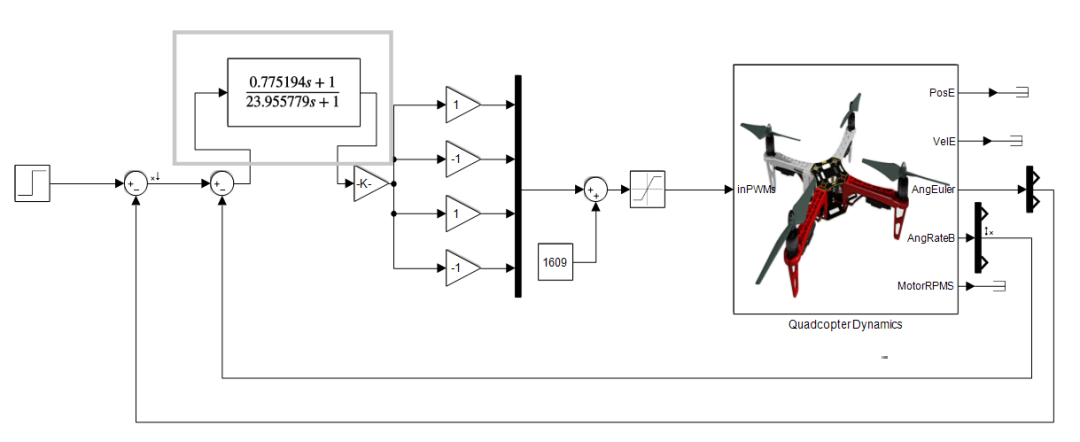
将b,ɷʹc代入,可得 T= 23.9558。此时校正系统的传递函数为:

将校正器加入到角速度控制环。
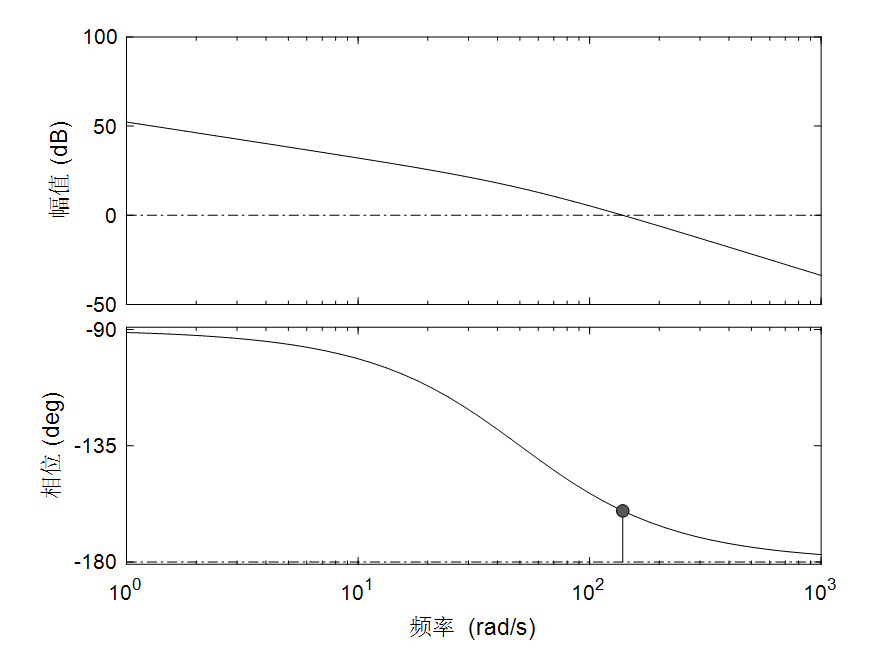
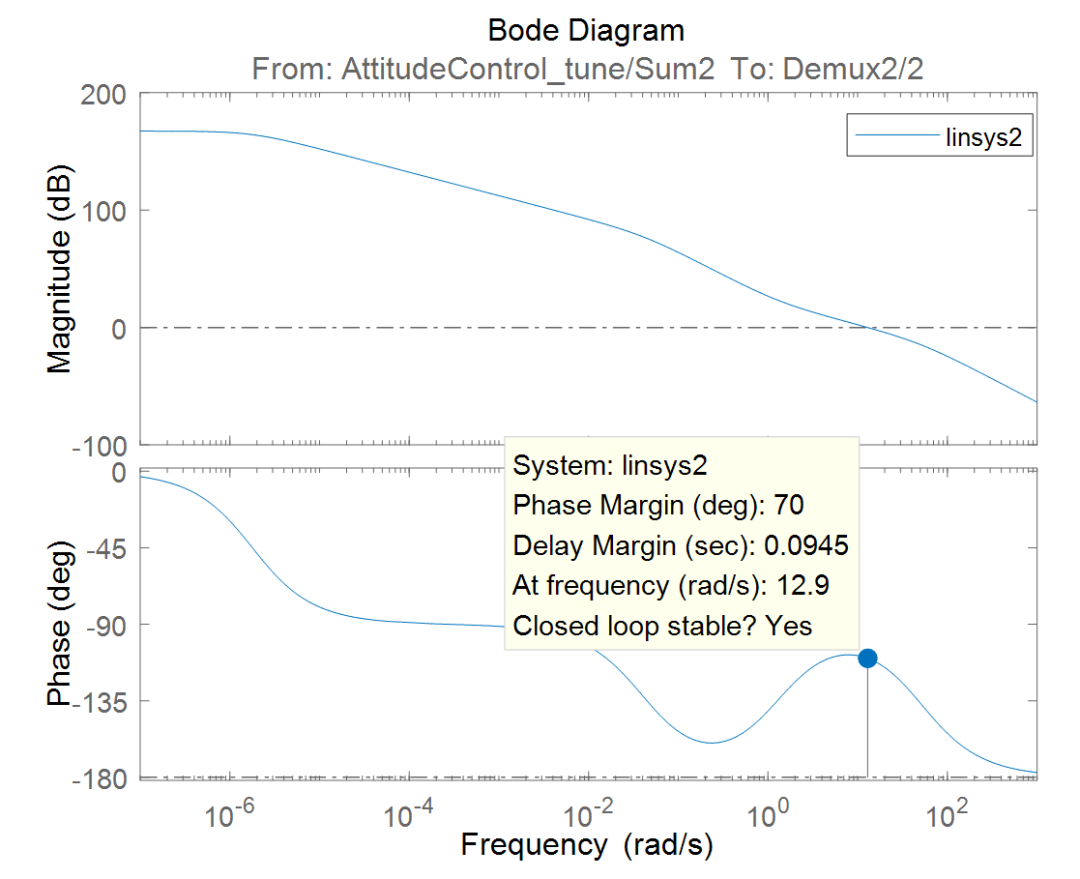
加入校正环节后的Bode图如图所示,相位裕度为70°。
依次类推,即可设计得到角度环校正器。按照如下图替换控制模型。即可进行下一步实验。

参考文献:
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.
这篇关于RflySim | 姿态控制器设计实验三的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








