本文主要是介绍RflySim | 姿态控制器设计实验二,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本实验的目的是让多旋翼的姿态能够跟随我们给定的期望姿态,姿态控制器的好坏直接决定了多旋翼能否平稳飞行。
RflySim| 姿态控制器设计实验二
01 基础实验
1.复现四旋翼飞行器的Simulink仿真,分析控制分配器的作用;
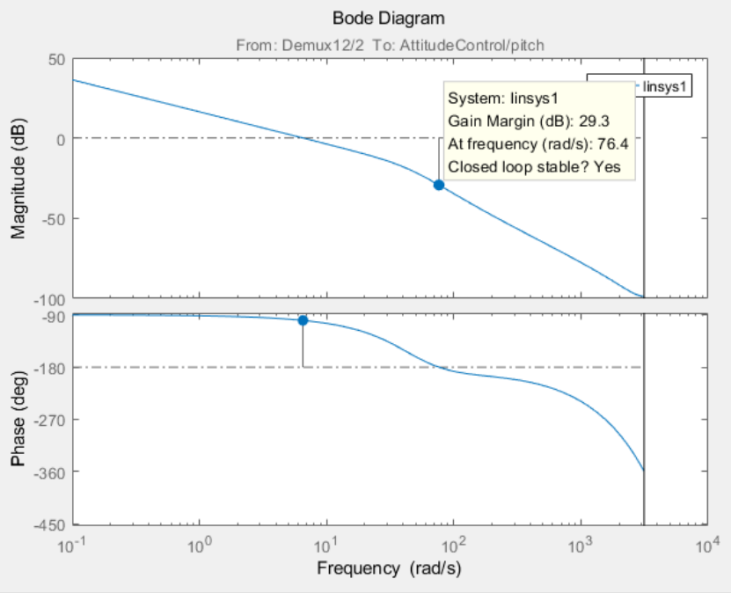
2.记录姿态的阶跃响应,并对开环姿态控制系统进行扫频以绘制Bode图,分析闭环姿态控制系统的稳定裕度;
3.完成四旋翼硬件在环仿真;
本实验对应demo文件对于RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e5-AttitudeCtrl\e5.1;对于RflySim v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e5-AttitudeCtrl\e5.1。
打开MATLAB软件,在MATLAB中打开" \e5-AttitudeCtrl\e5.1\Sim\Init_control.m"文件,点击运行。同时Simulink文件 “AttitudeControl_Sim.slx”将会自动打开。点击 Simulink“开始仿真”按钮开始仿真。
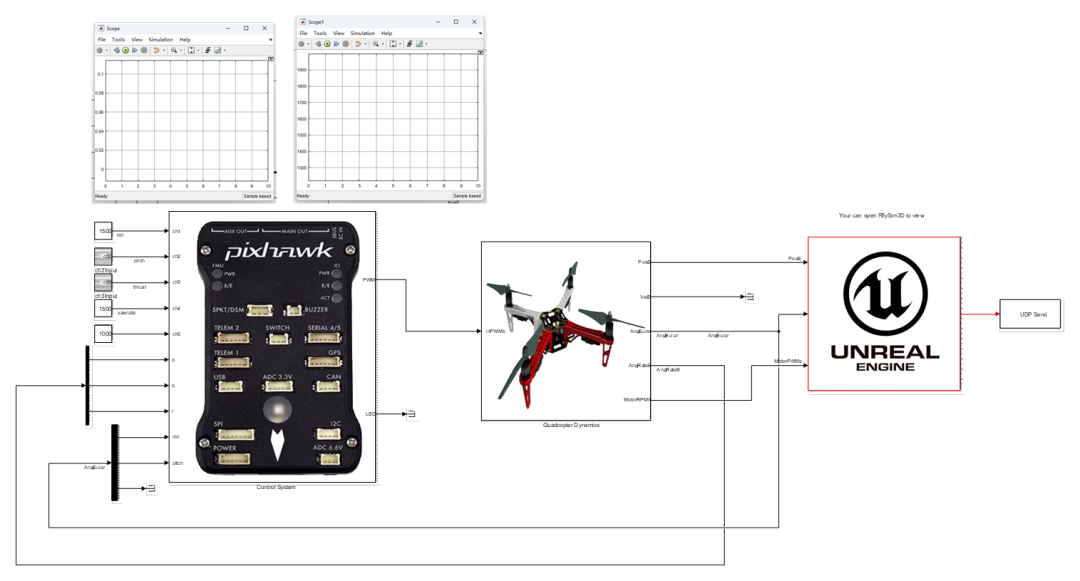
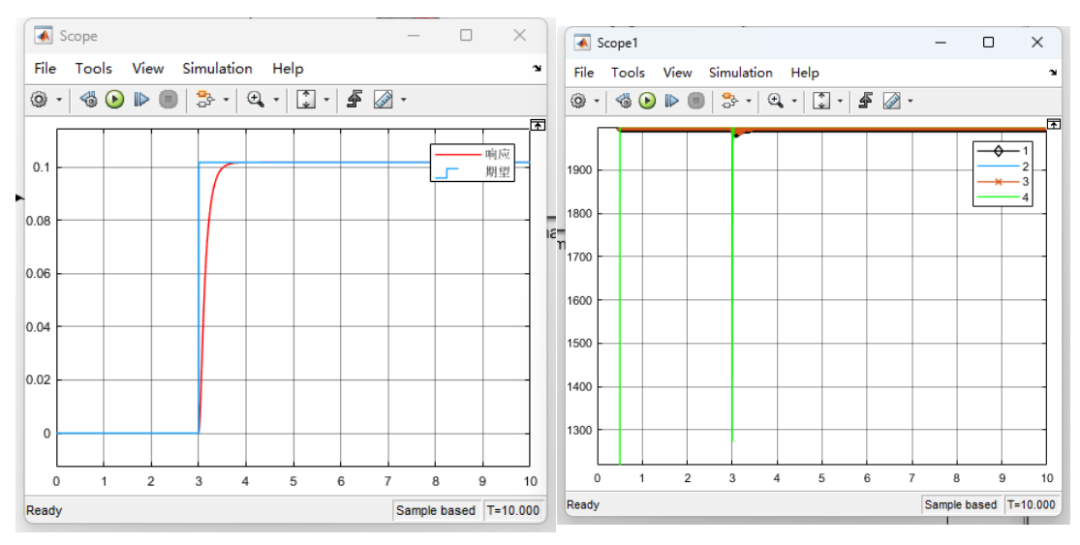
即可得到在俯仰角为阶跃响应下的响应和通过控制分配模块生成的PWM值。
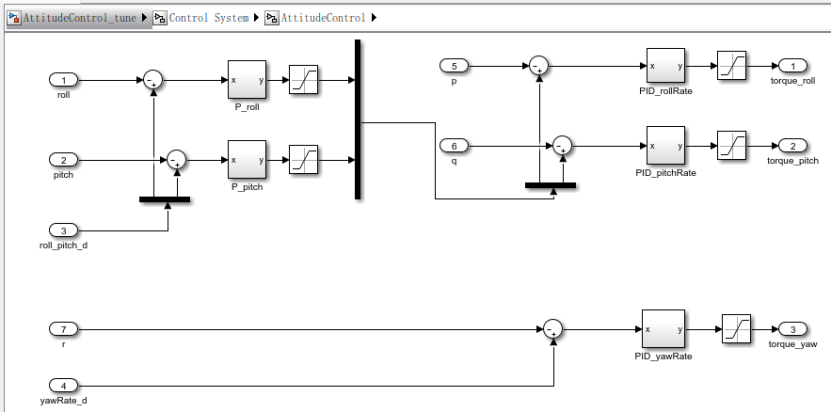
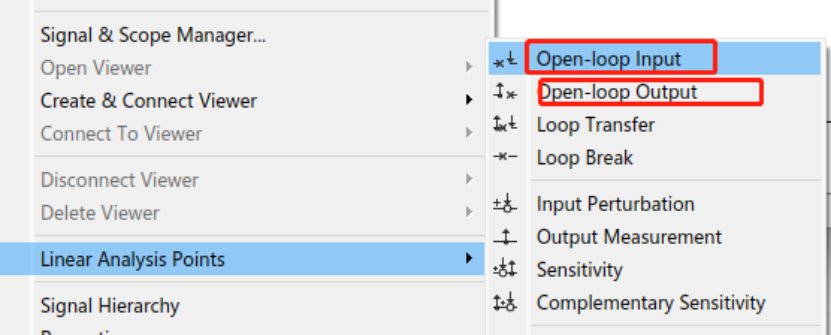
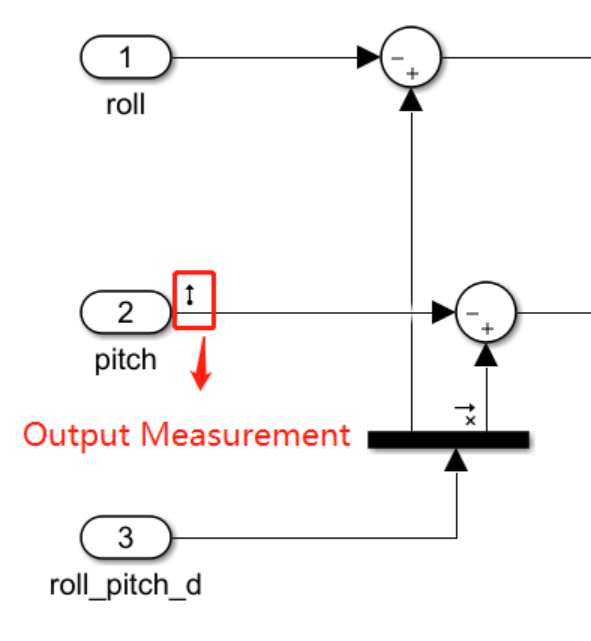
稳定裕度查看:运行"\e5-AttitudeCtrl\e5.1\tune\Init_control.m"文件,“AttitudeControl_tune.slx”文件自动打开。在“Control System”-“AttitudeControl”子模块中可见如图所示的姿态控制系统模型。设置信号的输入输出点:选中信号线,点击鼠标右键,选择“Linear Analysis Points”如图选择输入或输出。
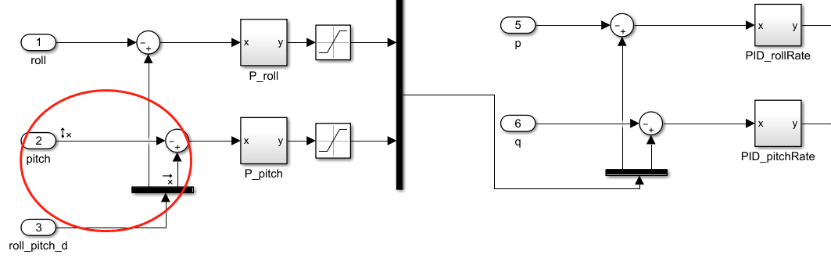
选择 Simulink 上面菜单中的“Analysis”-“Control Design”-“Linear Analysis”, 在弹出的窗口中选择“LINEAR ANALYSIS”,,点击“Bode”,即可得到Bode图,右键点击曲线,选择“Characteristic”- “All Stability Margins’’,可以看到截止频率、幅值裕度和相角裕度等。
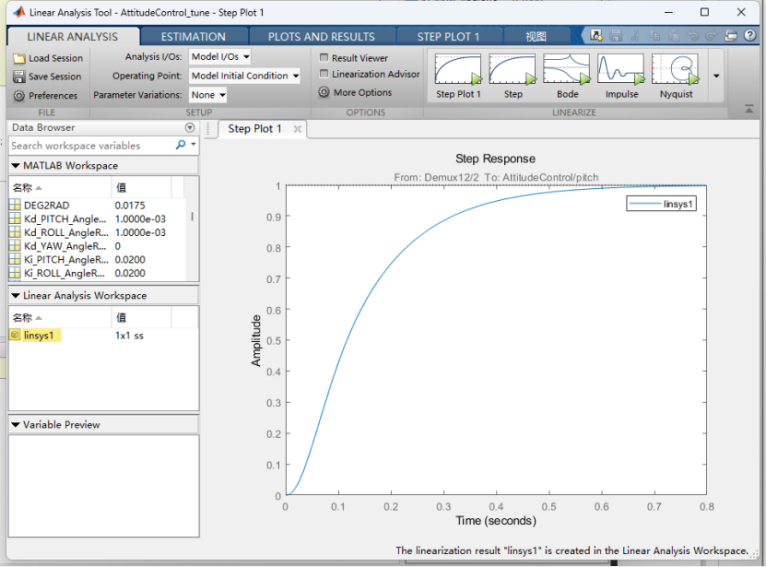
阶跃响应:先初始化“AttitudeControl_tune.slx”文件。设置信号的输入输出点:选中信号线,点击鼠标右键,选择“Linear Analysis Points”– 输入选“Open-loop Input” ; 输出点设置最后选择Output Measurement。
进入Simulink的“Linear Analysis”界面, 点击“Step”即可得到阶跃响应曲线。
参考文献:
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.
这篇关于RflySim | 姿态控制器设计实验二的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









