后方专题

链表(静态/动态创建,遍历,计数,查找,在节点的前/后方插入新节点,头插法,尾插法)
目录 一、前言 二、链表的静态创建和遍历 三、链表统计节点,查找节点是否存在 四、从指定节点的后方插入新节点 五、从指定节点的前方插入新节点 六、动态创建链表&尾插法 七、头插法 八、删除节点 一、前言 链表本质是一个结构体,结构体里不仅包含不同类型的数据,最重要的是定义了一个指向相同结构体类型的指针(必须是相同类型的结构体),通过这个指针我们就可以将一个又一个的结构体链接

后方穿行预警系统技术规范(简化版)
后方穿行预警系统技术规范(简化版) 1 系统概述2 预警区域3 预警目标4 预警条件5 指标需求 1 系统概述 RCTA后方穿行预警系统工作在驾驶员有倒车意向的时候。在倒车过程中当驾驶员视线因周围障碍物被遮挡而产生碰撞风险时,系统通过光学信号对驾驶员进行提醒。 2 预警区域 RCTA报警区域左右对称,由P0,P1,P2和P3组成: P0:为后保中点; P1:P0P1

后方碰撞预警系统技术规范(简化版)
后方碰撞预警系统技术规范(简化版) 1 系统概述2 预警区域3 预警目标4 功能需求功能条件5 显示需求6 指标需求 1 系统概述 后方碰撞预警系统RCW(Rear Collision Warning)是在后方车辆即将与自车发生碰撞之前,激活危险警告灯以较高频率闪烁,从而吸引后方驾驶员的注意力,避免追尾事故的发生。RCW根据两颗后角雷达信息判断是否存在后碰撞风险。只有当后方


已知两点坐标如何快速增加其他坐标_教测量员如何精确测准后方交会——详解后方交会具体操作步骤带图...
相信做过工程测量的测量员朋友,一定深有体会,后方交会是测量定位、控制网加密和自由设站法施工放样的重要方法。因为传统的后方交会往往是以测角为主,但伴随着电子测距仪在生产中的普遍应用,距离后方交会定位法日益得到应用,你比如隧道工程控制网往往由于隧道开工前测设完成,而洞口土石方施工完毕后,需补设洞口投点,以便控制隧道轴线,测设投点就要用到后方交会法;深水桥墩放样测量中的墩心定位也可以应用此
基于c++和Python的单像空间后方交会
学习摄影测量之后一直都很想用代码实现一下这个特别经典的,难度又不是很大的课堂案例,但是由于一直在看其他开源项目的代码,一直被搁置,趁着暑假完成一下曾经的小目标。 没想到这东西看起来步骤清晰且简单,实现起来竟然踩了特别多的坑,主要就是Python中的数组和基于OpenCV的c++Mat这两者用起来差别有点大,搞得我晕头转向的,很难受...... 一、Pyth
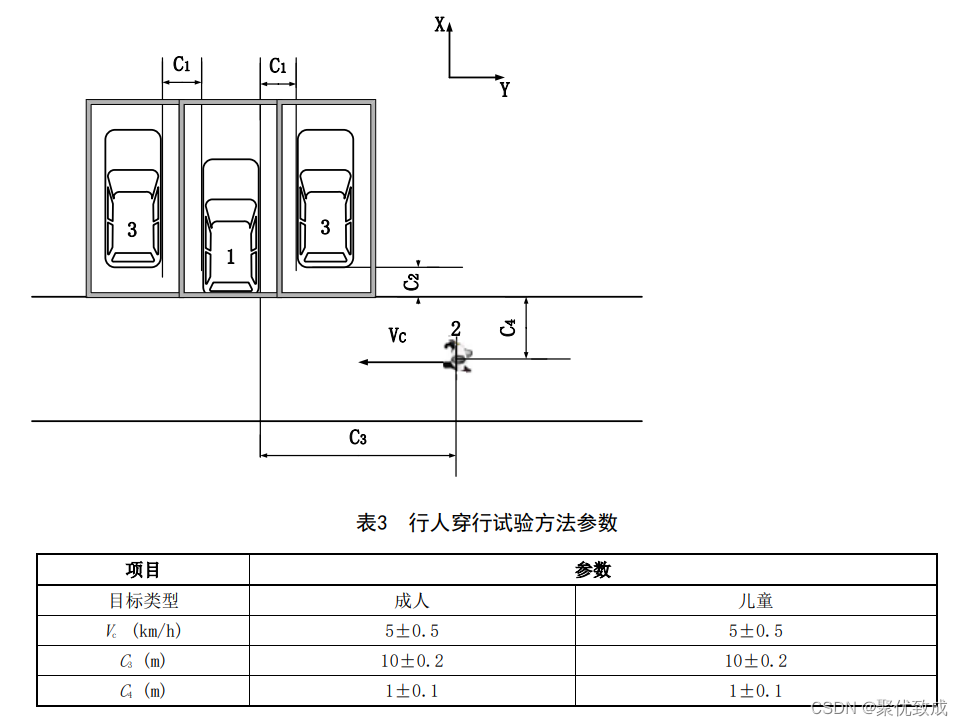
汽车电子 -- 车载ADAS之RCTA(后方横向来车预警 )
国际标准: RCTA: GB/T XXXXX—XXXX 乘用车后部交通穿行提示系统性能要求及试验方法 一、后方横向来车预警RCTA( Rear Cross Traffic Assist) 在车辆倒车时,实时监测车辆后方横向接近的其它道路使用者,并在可能发生碰撞危险时发出警告信息的系统。 报警区域 机动车穿行试验: 试验车辆中轴线平行于X轴,遮挡车辆临近试验车辆的车身最外缘(不包括外后视