光流专题

光流(optical flow)和openCV中实现
转载请注明出处!!!http://blog.csdn.net/zhonghuan1992 光流(optical flow)和openCV中实现 光流的概念: 是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间

DeepFlow高效的光流匹配算法(下)
分 享 本周主要介绍一篇基于传统光流法而改进的实现快速的稠密光流算法。该算法已经集成到OpenCV中,算法介绍网址:http://lear.inrialpes.fr/src/deepmatching/ 在介绍该高效的算法之前,我们先介绍一下经典的LK光流算法,所以这篇文章将分为上下两篇。 第一篇DeepFlow高效的光流匹配算法(上)主要介绍光流算法的基础知识,以及理论推导。 第二篇将介绍改进的

【OpenCV】 中使用 Lucas-Kanade 光流进行对象跟踪和路径映射
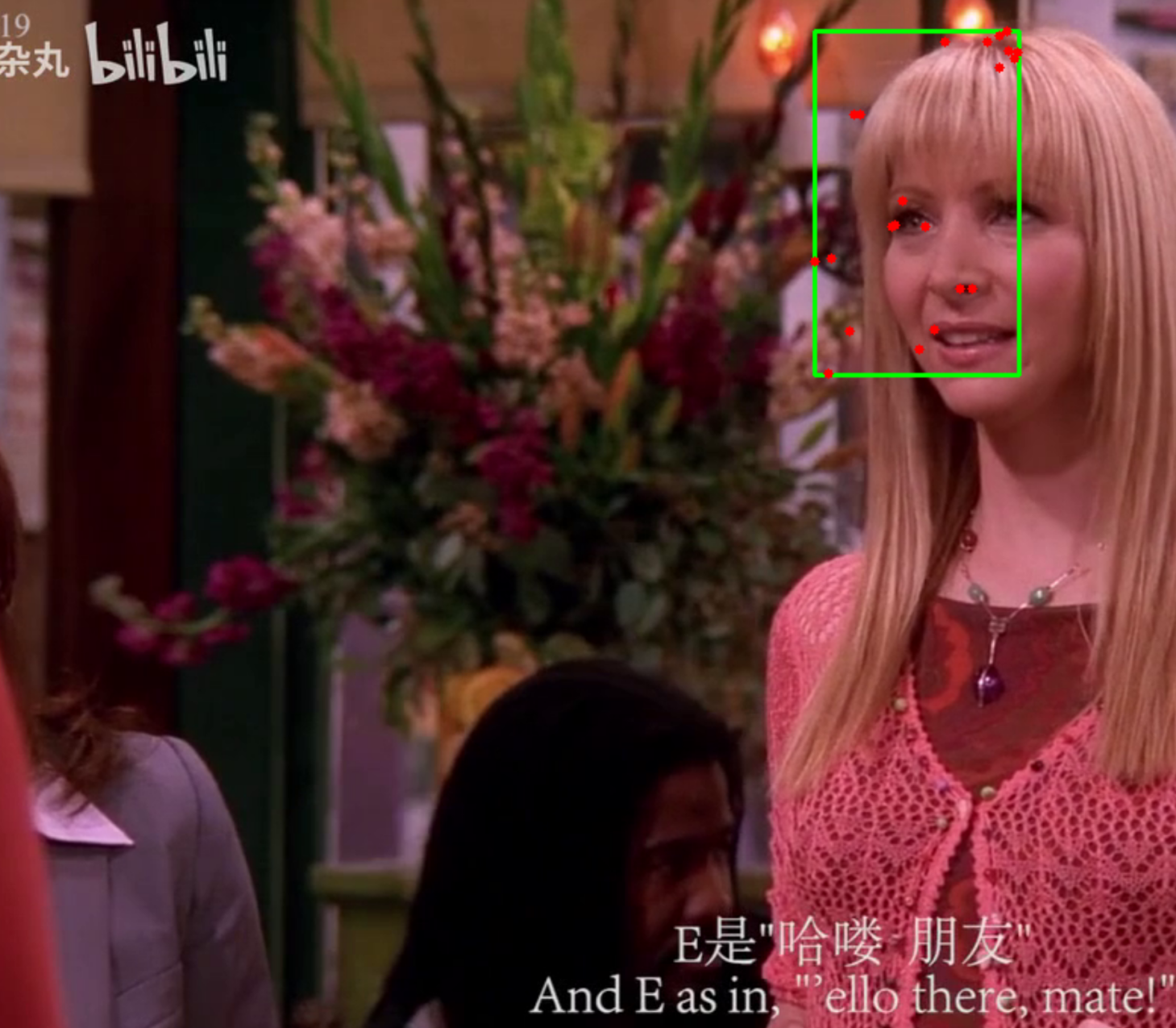
文章目录 一、说明二、什么是Lucas-Kanade 方法三、Lucas-Kanade 原理四、代码实现4.1 第 1 步:用户在第一帧绘制一个矩形4.2 第 2 步:从图像中提取关键点4.3 第 3 步:跟踪每一帧的关键点 一、说明 本文针对基于光流法的目标追踪进行叙述,首先介绍Lucas-Kanade 方法的引进,以及基本推导,然后演示如何实现光流法的运动跟踪。并以Open

【光流】——liteflownet3论文详析与推理代码浅析
光流,liteflownet code from:pytorch-liteflownet3 1. 前言 深度学习方法在解决光流估计问题方面取得了巨大的成功。成功的关键在于使用成本量和从粗到细的流推理。然而,当图像中存在部分遮挡或均匀区域时,匹配问题就变得不适态。这将导致成本卷包含异常值,并影响来自它的流解码。此外,从粗到细的流推理还需要精确的流初始化。模糊的对应关系会产生错误的流场,并影

【光流】——liteflownet2论文与代码浅析
光流,liteflownet code from:mmflow 上图就是光流中的核心三大件: feature warpcorse to fine inferflow regularization 1. 训练细节 主要的深度学习网络都是所有模块一起训练的,光流训练比较困难,在训练技巧上可做的技巧比较多。 采用分阶段的训练,一个模块一个模块的训练。 先训练NetC和NetE中的 M

光流 | MATLAB实现 Brox Optical Flow(代码类)
博主github:https://github.com/MichaelBeechan 博主CSDN:https://blog.csdn.net/u011344545 function [u, v] = optic_flow_brox(img1, img2) img1 = imread('frame07.png'); img2 = imread('frame08.png'); alpha =

光流 | 图像特征匹配:特征光流与角点特征
/********************************************************** github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ***********************************************************/
光流 | 特征光流之视频中物体检测一(论文分享)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 原文作者:朱锡洲 学科专

光流 | 高精度:HS光流计算(matlab源代码)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 =====================================================

光流 | 基于HS光流算法的稠密光流提取(Matlab源代码)
===================================================== github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 ===================================================== 直接上效果
计算机视觉——OpenCV实现Lucas-Kanade 光流
1.光流 光流法是计算机视觉中用于估计图像序列中物体运动的关键技术。它类似于观察夜空中的彗星,通过其在天空中的运动轨迹来追踪它的路径。在图像处理中,光流帮助我们理解像素点如何在连续的帧之间移动。 1.1 稀疏光流法 稀疏光流法关注于图像中的关键点(通常是角点或显著的特征点),并计算这些点在连续帧中的运动。Lucas-Kanade算法是这种方法的一个经典例子,它通过比较特征点在连续两帧中的灰度

【光流评估】《Optical Flow Estimation using a Spatial Pyramid Network》2016 Tubingen, Germany
摘要:我们通过结合深度学习和经典空间金字塔结构的方式来计算光流。通过使用每个金字塔级别的光流评估warp图像和更新光流,这种方法以一个粗到精的方式评估图像中的大运动。不同于在每个金字塔层级最小化对象函数。我们在每个层级训练网络,以计算光流更新。不像最近的FlowNet光流网络,本网络不需要处理大运动,由网络中的金字塔层级处理大运动。这有几个优点:(1)在模型参数上我们的SpyNet更简单,比Flo
【图像分割】光流生成标签(matlab)
文章目录 1. 框架2. opticalFlow_label3. 光流 1. 框架 2. opticalFlow_label close all; clear; clc;% 使用光流进行标签的生成%% 视频帧的读取npy_data = readNPY('train.npy');%% 提取标签的坐标first_label = squeeze(npy_data(2,1,

OpenCV基本图像处理操作(八)——光流估计
光流估计 光流估计是一种用于检测图像序列中像素点运动的技术。它基于这样的假设:在连续的视频帧之间,一个物体的移动会导致像素强度的连续性变化。通过分析这些变化,光流方法可以估计每个像素点的运动速度和方向。 光流估计通常用于多种应用,包括: 运动检测:在视频监控中识别移动物体。场景重建:帮助理解三维场景的结构。视频压缩:通过预测帧间的移动减少需要存储的数据量。增强现实:实时跟踪现实世界中的对象和
opencv支持的一些计算光流的算法
Lucas-Kanade(LK)光流算法 Lucas-Kanade(LK)光流算法是一种经典的稀疏光流算法,用于估计图像中局部区域的运动信息。它最初由Bruce D. Lucas和Takeo Kanade于1981年提出,是最早的光流估计方法之一,至今仍然被广泛应用。 LK光流算法的基本原理是利用局部区域的像素灰度值在两帧图像中的变化来估计运动向量。具体而言,它假设了一个关于运动的线性模型,并通过

OpenCV pyramid lk(Lucas Kanade)光流算法自己的一些注释
参考如下: 代码注释的一个参考文章 https://blog.csdn.net/findgeneralgirl/article/details/107919541 原理参考文章 https://blog.csdn.net/qq_41368247/article/details/82562165 https://blog.csdn.net/sgfmby1994/article/details
【计算机视觉】目标跟踪| 光流算法详细介绍|附代码
0、前言 在上篇文章中https://blog.csdn.net/Yaoyao2024/article/details/136625461?spm=1001.2014.3001.5501,我们对目标跟踪任务和目标跟踪算法有了大致的了解。今天我们就来详细介绍一下其中的生成式算法的一种:光流法。 在介绍光流法之前,让我们先回顾一下生成式目标跟踪算法: 生成式的方法,强调先对所需跟踪的目标进行

全面回顾 | 基于深度学习的光流估计算法汇总
点击上方“3D视觉工坊”,选择“星标” 干货第一时间送达 作者丨汽车人 ;来源丨 自动驾驶之心 光流估计是计算机视觉研究中的一个重要方向,其不像其他感知任务会显式的在应用中呈现。如今,光流估计也在基于视频的任务中承担着越来越重要的作用。 光流的基本概念 光流(Optical Flow)是一个有关物体运动的概念。最早由Gibson提出,描述的是空间中运动的物体在成像平面上,造成像素运动的瞬时速度。
Halcon 使用光流算子检测运动物体
文章目录 算子optical_flow_mg 计算两个图像之间的光流vector_field_length 计算向量场的向量长度select_shape_std 选择给定形状的区域vector_field_to_real 将矢量场图像转换为两个实值图像intensity 计算灰度值的均值和偏差local_max_sub_pix 以亚像素精度检测局部极大值 Halcon 光流算子示例Halco
第十三篇【传奇开心果系列】Python的OpenCV库技术点案例示例:光流估计
传奇开心果短博文系列 系列短博文目录Python的OpenCV库技术点案例示例:光流估计 短博文目录前言一、光流估计介绍二、Lucas-Kanade光流介绍和示例代码三、Horn-Schunck光流介绍和示例代码四、cv::calcOpticalFlowPyrLK()函数实现光流估计介绍和示例代码五、光流估计用于运动分析任务介绍和示例代码六、光流估计用于视频稳定任务介绍和示例代码七、光流估计

光流估计中cost volume详解
原创声明:是暮涯啊 https://blog.csdn.net/longshaonihaoa/article/details/124726727 MEMC系列文章: 运动估计运动补偿(Motion estimation and motion compensation,MEMC)入门总结 深度学习MEMC插帧论文列表paper list 光流估计中cost volume详解 插帧中grid_sam

OpenCV | 光流估计
光流估计 光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”,根据各个像素点的速度的速度矢量特征,可以对图像进行动态分析,例如目标跟踪 高度恒定:同一点随着时间的变化,其亮度不会发生改变。小运动:随着时间的变化不会引起位置的剧烈变化,只有小运动情况下才能用前后帧之间单位位置变化引起的灰度变化去近似灰度对位置的偏导数。空间一致:一个场景上临近的点投影到图像上也是临近点,且临近点速度一致,
重学OpenCV3纪要(还差卡尔曼滤波+光流追踪代码,择机更新)
注:<学习OpenCV3>一书适合有一定图像处理基础的读者,本书也不是入门读物,没有背景知识也没有详尽的公式推导,只是OpenCV3的使用手册。 1. OpenCV3函数库头文件简介 (1)opencv2/opencv.hpp:包含了所有课能用到的头文件,但是会降低编译速度,最好单独指定; (2)opencv2/core/core.hpp:c++风格的结构及数学运算; (3)open

OpenCV计算机视觉实战 - Task7 - 背景建模 光流估计
############################################################### 【纸上得来终觉浅,绝知此事要躬行】 B站视频 新课件:https://pan.baidu.com/s/1frWHqCVGR2VTn5QBtW4lPA 提取码:xh02 老课件:https://pan.baidu.com/s/1Wi31FxSPBqWiuJX9quX-jA

无人机光流模块的选择
匿名光流,这个暂且不说 我突然发现匿名也用优象的 后来发现匿名直接说了,直接使用原厂光流模块。下面匿名给的图也可以看出他们是怎么焊优象的光流模块的。 https://blog.csdn.net/wangjt1988/article/details/95874509 ACfly自带支持的三种光流模块是:优象LC302 mini光流(无名我看到似乎就是Mi