体素专题

Open3D 体素随机下采样
目录 一、概述 1.1原理 1.2实现步骤 1.3应用场景 二、代码实现 三、实现效果 3.1原始点云 3.2体素下采样后点云 Open3D点云算法汇总及实战案例汇总的目录地址: Open3D点云算法与点云深度学习案例汇总(长期更新)-CSDN博客 一、概述 体素随机下采样是一种常用的点云简化方法,通过将点云划分为立方体体素网格,并从每个体素中随机

服务器3D场景建模(四):体素场景(二)
(提示:体素相关文章参考至http://gad.qq.com/article/detail/10014) 跳跃、飞行 跳跃 飞行 行走需要的角色信息: a. 角色位置信息: (x, y, z, layer, dynamicId) b. 角色跳跃、飞行的方向: dirX、dirY、dirZ跳跃、飞行的碰撞校验步骤为: Created with Raphaël 2.1.2

Open3D 最近点约束的体素滤波(35)
Open3D 最近点约束的体素滤波(35) 一、算法介绍二、算法步骤三、具体代码四、实现效果 一、算法介绍 最近点约束的体素滤波,是指在每个体素中,选择距离体素中心最近的原始点作为滤波结果,这样保留的是原始点位置。相比于体素滤波的重心点重新计算,或者八叉树体素中心,更加反映点云的原始分布。 二、算法步骤 1、加载点云 2、八叉树中心计算 3、中心最近点获取 4、得到

PCL 基于八叉树获取体素邻居
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 基于一个指定的体素,通过八叉树获取该体素周围的体素点云。 二、实现代码 //标准文件#include <iostream>#include <thread>//PCL#include <pcl/common/common.h>#include

体素技术在AI绘画中的革新作用
随着人工智能技术的不断进步,AI绘画已经成为艺术创作和视觉设计领域的一大趋势。在众多推动AI绘画发展的技术中,体素技术以其独特的优势,正在逐渐改变着我们对计算机生成图像的认识。本文旨在探讨体素技术在AI绘画中的应用与影响,揭示其背后的科学原理以及带来的创新变革。 体素,即体积像素,是三维空间中的基本单位,类似于二维图像中的像素。不同于传统的像素只能描述表面信息,体素能够包含物体内部结构的数据,为
PCL:基于体素的下采样
1.介绍 体素下采样(Voxel Grid Downsampling)是一种常用的点云处理技术,用于降低点云的密度,减少数据量,同时保持点云的特征。它通过在三维空间中定义一个体素网格,然后将每个体素内的点云数据替换为一个单独的点来实现。体素的大小可以根据需求进行调整,较大的体素将导致更大的下采样程度,而较小的体素则会保留更多的原始数据。 体素下采样在点云处理中有着广泛的应用场景
Open3D 体素滤波(30)
Open3D 体素滤波(30) 一、算法介绍二、算法实现1.代码2.效果 一、算法介绍 体素滤波(Voxel Grid Filtering)是一种常用的点云滤波算法,用于对点云数据进行下采样(降低数据密度)以及去除噪声。该算法将点云数据划分为规则的体素网格,然后在每个体素中选择一个代表性点作为该体素的输出点。 算法步骤如下: 1 划分体素网格: 首先,将点云空间划
【Godot4.2】 基于SurfaceTool的3D网格生成与体素网格探索
概述 说明:本文基础内容写于2023年6月,由三五篇文章汇总而成,因为当时写的比较潦草,过去时间也比较久了,我自己都得重新阅读和理解一番,才能知道自己说了什么,才有可能重新优化整理。 因为我对体素网格的原始算法并不精通,当时只是依靠自己的直觉以及Godot4.2提供的工具类来实现了自己的一套Godot体素网格生成算法。 你也可以把本文当做这些工具类的实例教程进来看。因此体素不体素的你也可
NeurIPS 2023 Spotlight | VoxDet:基于3D体素表征学习的新颖实例检测器
本文提出基于3D体素表征学习的新颖实例检测器VoxDet。给定目标实例的多视图,VoxDet建立该实例的三维体素表征。在更加杂乱的测试图片上,VoxDet使用体素匹配算法检测目标实例。实验表明,VoxDet中的三维体素表征与匹配比多种二维特征与匹配要更鲁棒、准确与高效。本文已收录于NeurIPS 2023并被选为SpotLight。 论文题目: VoxDet: Voxel Le
Open3D 从体素网格构建八叉树(14)
Open3D 从体素网格构建八叉树(14) 一、算法简介二、算法实现1.代码2.效果 一、算法简介 上一章介绍从点云构建八叉树,对点云所在体素进行了可视化显示,这里可以对体素构建八叉树,可视化显示八叉树的具体划分结构。 二、算法实现 1.代码 代码如下(示例): import open3d as o3dimport numpy as np# 构建点云对象pcd =

PCL 点云八叉树体素搜索
文章目录 一、简介二、实现代码三、实现效果参考资料 一、简介 之前没有深入了解PCL的八叉树结构,趁着有时间了解了一下其特性,其中有一些非常有趣的操作。比如这里的体素搜索,我们有时候需要将点云进行体素化,这种做法有助于进行局部分析,自然而然就必须要快速获取某个点所位于体素内的所有点,这有助于我们进一步的分析。PCL就为我们提供了这一操作。原理其实很简单,我们结合源代码看一下过程
![[论文阅读]Voxel R-CNN——迈向高性能基于体素的3D目标检测](https://img-blog.csdnimg.cn/de54f52aca1c49af9d4c214f39cd5ee8.png)
[论文阅读]Voxel R-CNN——迈向高性能基于体素的3D目标检测
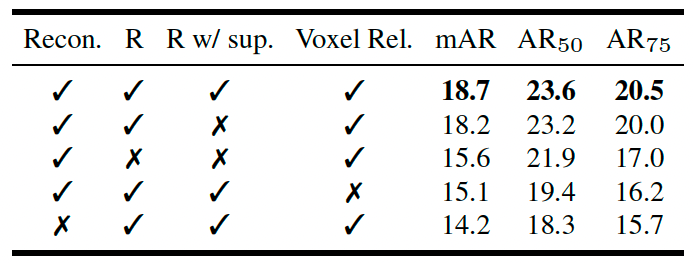
Voxel R-CNN Voxel R-CNN: Towards High Performance Voxel-based 3D Object Detection 迈向高性能基于体素的3D目标检测 论文网址:Voxel R-CNN 论文代码:Voxel R-CNN 简读论文 该论文提出了 Voxel R-CNN,这是一种基于体素的高性能 3D 对象检测框架。作者认为,原始点的精确定位对于准确

csg体素构造表示形式(Constructive Solid Geometry)
csg的全称是Constructive Solid Geometry,也就是体素构造表示形式。godot引擎中有支持。主要用于一些形状间的结合,通过联合,相交,相减的操作来组成一个新的网格体。这种技术在有号距离场的形状距离识别中也有相应的应用。Prototyping levels with CSG — Godot Engine (stable) documentation in English
「镁客·请讲」体素科技丁晓伟:国内智能医疗起步晚但发展迅速,产品普及还需更多临床数据与市场教育...
相比于直接解决效率的应用产品,一些对临床工作流程改变较大,就需要收集一定的数据后再对市场教育才可以推开。 因为人工智能的出现,越来越多的产业开始搭上这列“顺风车”。与此同时,针对现有行业中的某些问题,一些创业者也瞄准方向开始了自己的“漫漫长征路”。 比如医疗行业,智能医学影像分析、医疗数据管理、手术机器人……越来越多的医疗服务变得“智能化”。在过去的两年内,“智能医疗”也成为一
【三维重建】三维二元体素骨架转换算法matlab仿真
目录 1.算法仿真效果 2.MATLAB源码 3.算法概述 4.部分参考文献 1.算法仿真效果 matlab2022a仿真结果如下: 2.MATLAB源码 0264_ %****************************

基于体素场景的摄像机穿模处理
基于上一篇一种基于体素的射线检测 使用射线处理第三人称摄像头穿模问题 基于体素的第三人称摄像机拉近简单处理 摄像机移动至碰撞点处 简单的从角色身上发射一条射线到摄像机,中途遇到碰撞就把摄像机移动至该碰撞点 public void UpdateDistance(float defaultDistance){Vector3 from = player.position;