仿射专题
图像处理基础篇-镜像仿射透视
一.图像镜像 图像镜像是图像旋转变换的一种特殊情况,通常包括垂直方向和水平方向的镜像。水平镜像通常是以原图像的垂直中轴为中心,将图像分为左右两部分进行堆成变换。如图7-1所示: 垂直镜像通常是以原图像的水平中轴线为中心,将图像划分为上下两部分进行堆成变换的过程,示意图如图7-2所示。 在Python中主要调用OpenCV的flip()函数实现图像镜像变换,函数原型如下: dst =

计算机视觉全系列实战教程:(十)图像的几何变换:平移 旋转 翻转 缩放 仿射等变换
1.概述 (1)Why(为什么要进行图像的几何变换) 校正图像形变:纠正由于拍摄角度或硬件原因导致的图像几何变形图像增强:在深度学习的模型训练时,通过几何变换获得更多的训练集图像配准和拼接:先进行几何变换矫正,然后实现图像的配准或拼接 (2)What(什么是图像的几何变换) 本质:对图像像素的位置进行改变的操作 (3)Which(有哪些几何变换) 位置变换:平移、旋转(填充旋转和截断旋

matlab affine3d解析--三维仿射几何变换
** affine3d() 三维仿射几何变换 **: 一、描述 affine3d对象封装了一个三维仿射几何变换。 二、解释语法 tform = affine3d() 创建具有与标识转换对应的默认属性设置的affine3d对象。 tform = affine3d(A) 构造给定输入4×4矩阵A的affine3d对象,该矩阵指定一个有效的4×4仿射变换矩阵。 输入参数: A 是一个4×

仿射变换(AffineTransform)与仿射矩阵
前言 仿射变换(Affine transformation),又称仿射映射,是指在几何中,对一个向量空间进行一次线性变换并接上一个平移,变换为另一个向量空间。 它是一种二维坐标到二维坐标间的线性变换,保持了二维图形的“平直性”(直线经过变换之后依然是直线)和“平行性”(二维图形之间的相对位置关系保持不变,平行线依然是平行线,且直线上点的位置顺序不变)。 任意的仿射变换都能表示成“乘以一个矩
15、Opencv4.4仿射变化
基本思想:对图像进行仿射处理 #include <opencv2/opencv.hpp>#include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <iostream>using namespace std;using namespace cv;int main() {Point2f src

base64+摩斯+base16+仿射密码(排除伪加密)
解压得到题目 点开txt LS0uLi4vLi4uLi0vLS0uLi4vLS4uLi4vLS4uLi4vLi4uLS0vLS4uLi4vLi4tLi8tLi4uLi8uLi4tLS8tLS4uLi8uLS0tLS8tLi4uLi8tLi4uLy0uLi4uLy4uLi4uLy0uLi4uLy0uLi4uLy0uLi4uLy0uLi4vLS4uLi4vLS4tLi8tLi4uLi8tLi4v

MSER仿射不变特征匹配算法
MSER原理简述 个人博客 OpenCV实践之MSER仿射匹配算法 已更新讲述MSER仿射匹配算法代码 区域检测(Region Detection)方法是根据图像中具有某种同类性质的像元进行分类(例如相同像素值大小的点),然后把具有相同性质的像元合并成区域,实现区域的检测即图像分割。MSER(Maximally Stable Extremal Regions最大极值区域检测)方法与一般

Harris-Affine仿射不变特征匹配算法
Harris-Affine原理概述 文末已添加Github代码链接地址 尺度不变Harris-Laplace角点算法简述 经典Harris作为当下运用最为广泛的提取角点算子,具有旋转、尺度、部分光照不变性,计算简单。Hessian角点检测是比Harris算子的更加稳定的角点检测算子只是计算效率相比Harris要高。随着Harris算子提出进一步发展为具有尺度不变性的角点检测算子H

仿射密码解密(Affine Cipher)
仿射密码解密(Affine Cipher) 仿射密码是一种表单代换密码,字母表的每个字母相应的值使用一个简单的数学函数对应一个数值,再把对应数值转换成字母。 ABCDEFGHIJKLMNOPQRSTUVWXYZ012345678910111213141516171819202122232425 加密函数:E(x) = (ax + b) (mod m),其中 a与b互质,m是编
![[3D 图形学基础] 读书笔记(3) Part_I(Getting Started) - Affine 仿射](https://img-blog.csdn.net/20160706204859653)
[3D 图形学基础] 读书笔记(3) Part_I(Getting Started) - Affine 仿射
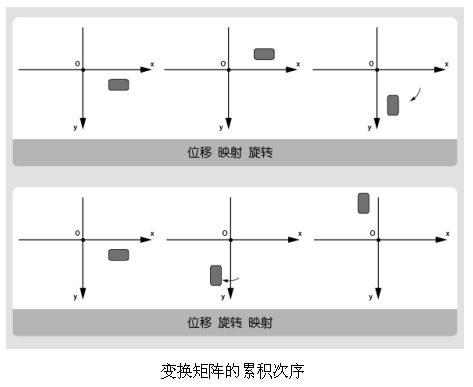
本章内容主要是一些概念的理解~ 1. 将坐标系从原先的三维拓展到了四维,从线性变换拓展到了仿射变换,简单理解就是从旋转/缩放变换增加了位移变换的功能。 2. 注意一下 刚体变换 这个概念,指的是只有 [旋转+位移] 的变换, 因为在这两种变换中,对象点与点之间的点乘关系不变,也就是说保持了刚体状态。 3. 最后讨论了仿射变换中,如何计算法线向量的问题 文章结束有本章内容的PDF链接~

OpenSSL密码库算法笔记——第5.4.8章 椭圆曲线点的仿射系数
设置仿射系数其实和设置射影系数非常类似,只不过需要将Z坐标设置为1,即设置射影坐标EC_POINT_set_Jprojective_coordinates_GFp(group, point, x, y, BN_value_one())。 ─────────────────────────────────────── int EC_POINT_set_affine_coordinates_GFp