云台专题

两轴直驱稳定云台的电源系统设计与关键要求
两轴直驱稳定云台,作为现代摄影、摄像及监控领域的高精尖设备,广泛应用于各种不稳定环境(如移动车辆、海上船只、空中飞机等),以提供相机、传感器等关键设备的稳定支持。其卓越的性能和可靠性,很大程度上依赖于其精心设计的电源系统。本文将对两轴直驱稳定云台的电源系统要求进行全面剖析,并深入探讨电压波动可能带来的不良影响及应对措施。 电源系统的核心要求 高容量与功率:

Nginx跨域运行案例:云台控制http请求,通过 http server 代理转发功能,实现跨域运行。(基于大华摄像头WEB无插件开发包)
文章目录 引言I 跨域运行案例开发资源测试/生产环境,Nginx代理转发,实现跨域运行本机开发运行 II nginx的location指令Nginx配置中, 获取自定义请求header头Nginx 配置中,获取URL参数 引言 背景:全景监控 需求:感知站点由于云台相关操作为 http 请求,http 请求受浏览器跨域限制,不能直接访问,因此需要进行 http 的代理,实

Java 接入海康 SDK 云台控制
简介 Java 接入海康 SDK 设置 PTZ,主要实现云台基本控制和云台预置点两个功能: 云台基本控制: NET_DVR_PTZControl:云台控制操作(需先启动图象预览)NET_DVR_PTZControl_Other:云台控制操作(不用启动图象预览)NET_DVR_PTZControlWithSpeed:带速度的云台控制操作(需先启动图象预览)NET_DVR_PTZControlW

光电稳定云台中的稳定精度,测角精度,跟踪精度分别什么含义
光电稳定云台是一种利用光电传感器和精密控制系统来实现对目标的精确跟踪和稳定观察的设备。在光电稳定云台中,稳定精度、测角精度和跟踪精度是三个关键的性能指标,它们的含义和精度要求如下: 稳定精度: 稳定精度指的是云台在锁定目标后,保持目标在视场中静止不动的能力。这通常涉及到云台的抗扰动能力和对环境振动的抑制能力。稳定精度通常以角秒或毫弧度为单位,表示云台能够在多长时间内将目标保持在

无人机之云台的重要性
无人机云台在无人机技术中占据着举足轻重的地位,其重要性体现在多个方面: 首先,无人机云台是确保拍摄稳定性的关键组件。无人机在飞行过程中,尤其是遇到风力干扰或进行复杂飞行动作时,机身容易产生震动和晃动。而云台的存在可以有效地隔离这些抖动,保证挂载在上面的相机或摄像头能够拍摄出稳定、清晰的画面。这对于航拍、侦察、监测等需要高质量影像的任务至关重要。 其次,无人机云台能
从零开始精通Onvif之云台控制
💡 如果想阅读最新的文章,或者有技术问题需要交流和沟通,可搜索并关注微信公众号“希望睿智”。 概述 Onvif云台控制主要通过网络协议实现远程操控,具体来说,用户通过客户端软件或移动App向服务器发送控制指令,服务器将指令转发给支持Onvif标准的摄像头设备。摄像头设备接收到指令后,通过内置的电机驱动云台进行旋转、缩放、移动到指定预置位等操作,并将实时画面传输回客户端。

UVC系列1-Android盒子控制云台摄像头系列
Android作为host端控制云台摄像头整个实现过程中涉及了Android kernel底层UVC部分,Android kernel代码的编译,USB协议,Android JNI方面的知识。 刚开始项目提出这个需求的时候,想到的是通过Android原生的USB API 去控制外接的USB PTZ摄像头,因为大多数的云台摄像头支持pelco-d或是pelco-p协议,而Android提供的接口可
Zigbee +PC上位机 无线控制二维云台开发笔记
今日尝试开发一款简单好学的PC上位机无线控制二维云台的小试验品: 主要开发环境与工具介绍: 单片机 STM32F103C8T6 使用标准库函数编程 Visual Studio 2022软件C# Winform 开发 上位机控制软件 DL_20 无线串口模块 + USB-TTL 模块 实现无线通信功能 文章提供完整代码解释、设计点解释、测试效果图、完整工程下载 目录 主要用到

uniapp对接萤石云 实现监控播放、云台控制、截图、录像、历史映像等功能
萤石云开发平台地址:文档概述 · 萤石开放平台API文档 (ys7.com) 萤石云监控播放 首先引入萤石云js js地址:GitHub - Ezviz-OpenBiz/EZUIKit-JavaScript-npm: 轻应用npm版本,降低接入难度,适配自定义UI,适配主流框架 video.vue <template><view class="content"><vi

Qt/C++通用跨平台Onvif工具/支持海康大华宇视华为天地伟业等/云台控制/预置位管理/工程调试利器
一、前言 在安防视频监控行业,Onvif作为国际标准,几乎主要的厂商都支持,不仅包含了国内的厂商,也包括主要的国际厂商,由于有了这个标准的存在,使得不同设备不同安防平台之间,能够接入各个厂家的硬件设备,互通有无,你中有我我中有你,实现良性竞争。ONVIF是一个全球性的开放式行业协议,其目标是促进开发和使用基于物理IP的安全产品接口的全球开放标准。ONVIF创建了一个视频监控和其他物理安全领域的I
树莓派 二维云台调零控制
目录 舵机的工作原理 案例程序 要求: 程序: 二维云台是通过IIC总线进行控制的,我们可以通过窗口命令输入:i2cdetect -y 1来检测IIC总线是否连接正常。 当有40显示的时候就说明IIC总线正常。 操控舵机我们需要一个PCA9685的模块,用到“Adafruit_PCA9685”的库函数,需要我们在官网下载。具体步骤: 树莓派下安装PCA9685的pyt

双轴驱动步进电机云台二自由度单片机控制程序PTU57
高精度云台由两个电机驱动,可控制方位角和高度角,具有两自由度的机械电子设备。可用于机器视觉、摄影摄像、监控安防、天文观测、雷达扫描、DIY雕刻机、转盘转台、智能机械手臂、双轴跟踪太阳能定日镜等各类应用高精度云台的场合。 步进电机是将电脉冲信号转变为角位移或线位移的控制电机,是现代数字程序控制系统中的主要执行元件,电机的转速、停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变
【STM32+OPENMV】二维云台颜色识别及追踪
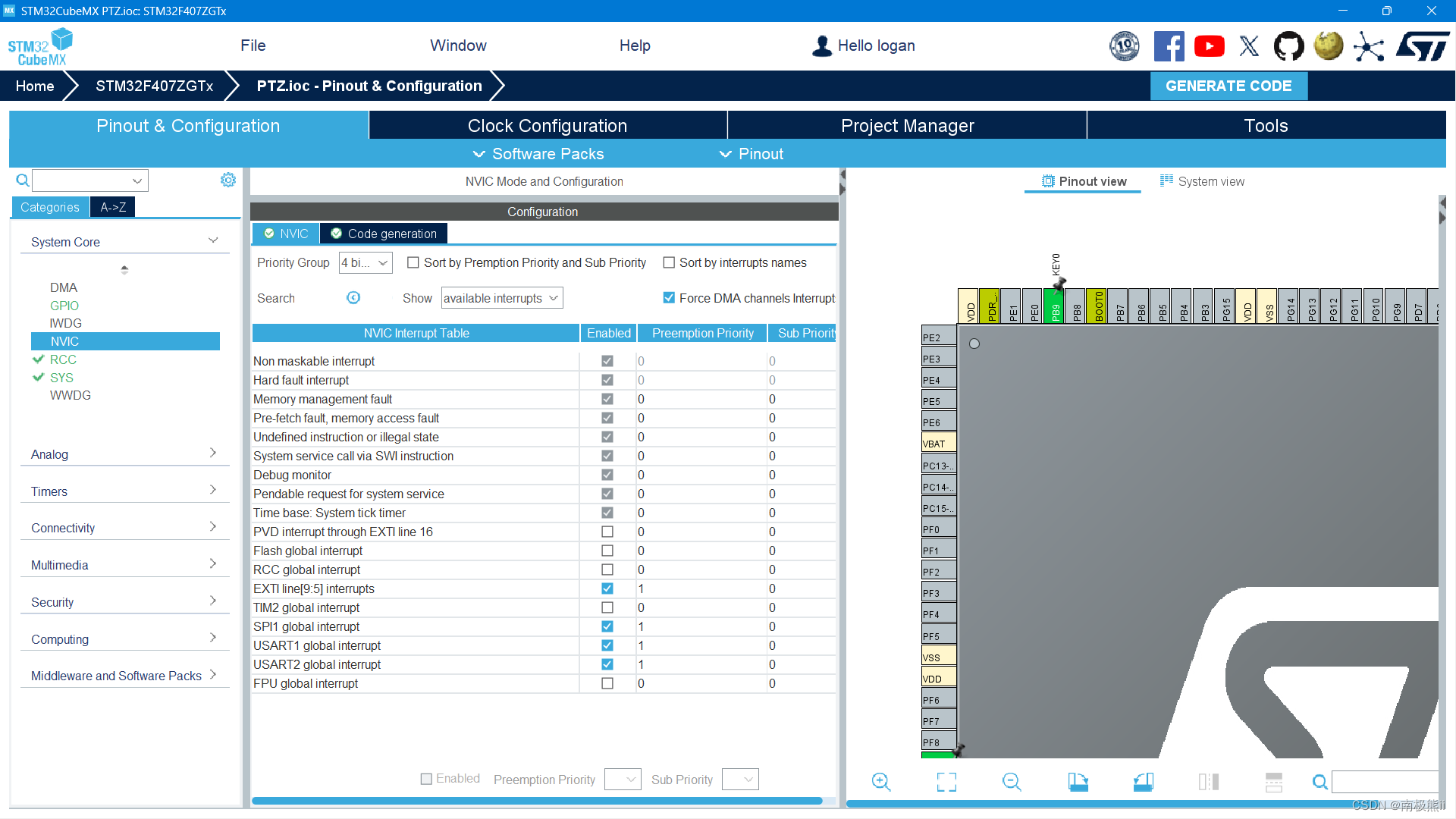
一、准备工作 有关OPENMV最大色块追踪及与STM32通信内容,详情见【STM32+HAL】与OpenMV通信 有关七针OLED屏显示内容,详情见【STM32+HAL】七针OLED(SSD1306)配置(SPI版) 二、所用工具 1、芯片:STM32F407ZGT6 2、CUBEMX配置软件 3、KEIL5 4、OPENMV 三、实现功能 二维云台追踪最大色块,并显示中

GB28181 —— Ubuntu20.04下使用ZLMediaKit+WVP搭建GB28181流媒体监控平台(连接带云台摄像机)
最终效果 简介 GB28181协议是视频监控领域的国家标准。该标准规定了公共安全视频监控联网系统的互联结构, 传输、交换、控制的基本要求和安全性要求, 以及控制、传输流程和协议接口等技术要求,是视频监控领域的国家标准。GB28181协议信令层面使用的是SIP(Session Initiation Protocol)协议。 ZLMediaKit 是一个基于C+
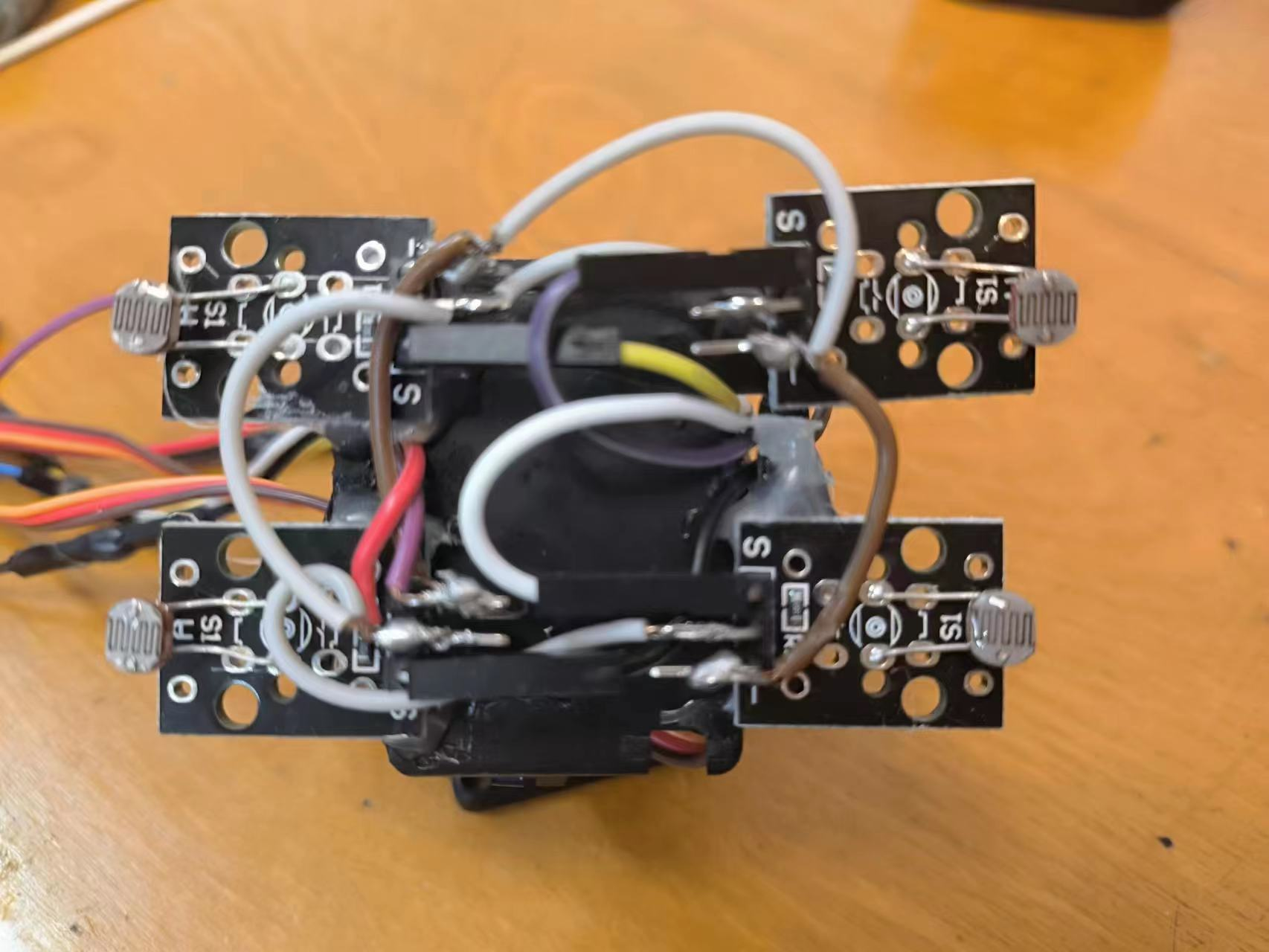
基于STM32F1的自动追光云台(代码开源)
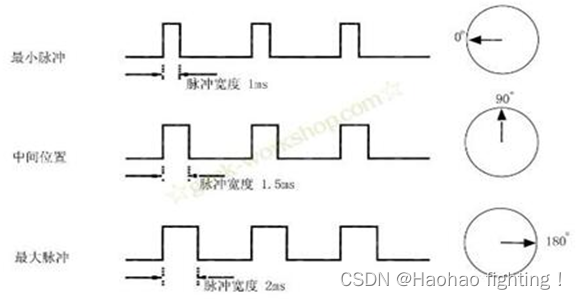
前一段时间做了一个自动追光云台(大家感兴趣的也可以自己DIY一个呀),用来自动捕捉阳光供太阳板发电提高太阳板的发电效率,我用了一款STM32f103c8t6为主控来控制云台舵机的旋转。感光元器件使用的是光敏传感器(淘宝随便买一款啊很便宜)来感知光强,所以用ADC进行模拟量采集光强信息。下面就来介绍介绍它吧! 舵机旋转的控制 舵机的主要组成部分为伺服电机,伺服就是服从信号的要求从而做出相应动作
OPENMV驱动云台实现颜色追踪
前言 本篇文章旨在记录我电赛期间学习OPENMV对颜色识别,以及通过串口通信的方式将坐标数据传给单片机,从而驱动舵机云台进行颜色追踪。 一、OPENMV色块识别追踪代码 # Single Color RGB565 Blob Tracking Example## This example shows off single color RGB565 tracking usin

Raspbian安装云台
Raspbian安装云台 1. 源由2. 选型3. 组装4. 调试4.1 python3-print问题4.2 python函数入参类型错误4.3 缺少mjpg-streamer可执行文件4.4 缺失编译头文件和库4.5 python库缺失4.6 图像无法显示,但libcamera-jpeg测试正常4.7 异常IOCTL报错4.8 Git问题 5. 效果5.1 WEB页面效果5.2 视频效果
静音,低振动,256细分,具有全方位保护,step/dir接口或uart接口,AGC自动幅度调整,适用于白色家电,医疗器械,云台等可替代TMC2208/2209/trinamic
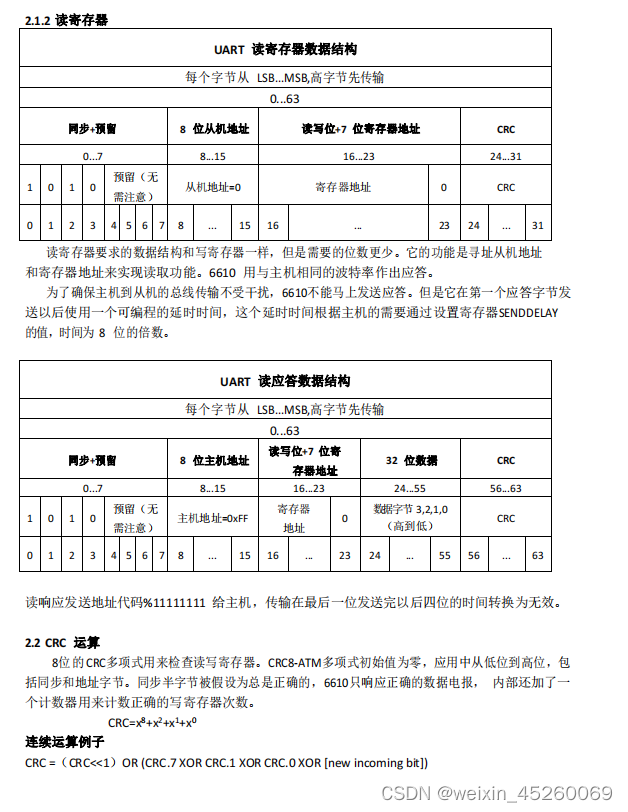
6610 具有下述的重要特征,步进电机的运动会更加精密,高效,可靠,平滑以及节能。 静音模式: 运动与静止时无噪声,高精度。运行更快的电机加速与减速,并静态电机电流更低。 快速模式: 高精度,闭环电流控制方式,可以达到最高的动态性能。 微细分控制: 微步插值法得到 256 细分的内部微步进,外部只需要低精度步进控制,从整步起。 另 外

小米智能摄像机云台版pro 拆解教程
拆解原因 因为设备提示无内存卡,摄像头手动调整方向到最上面,就可以看到内存卡插槽 但是这个摄像头因为内存卡弹出来了,导致无法插入也无法取出,所以决定拆开重新安装 第一步,拆开后即可拔出底座,拔掉摄像头供电线,即可将底座分离 第二步,拆开后即可拔出底座,拔掉摄像头供电线,即可将底座分离 第三步,将轴承和卡座移除后,可以看到四个浅螺丝和三个深螺丝,需要用到长螺丝刀
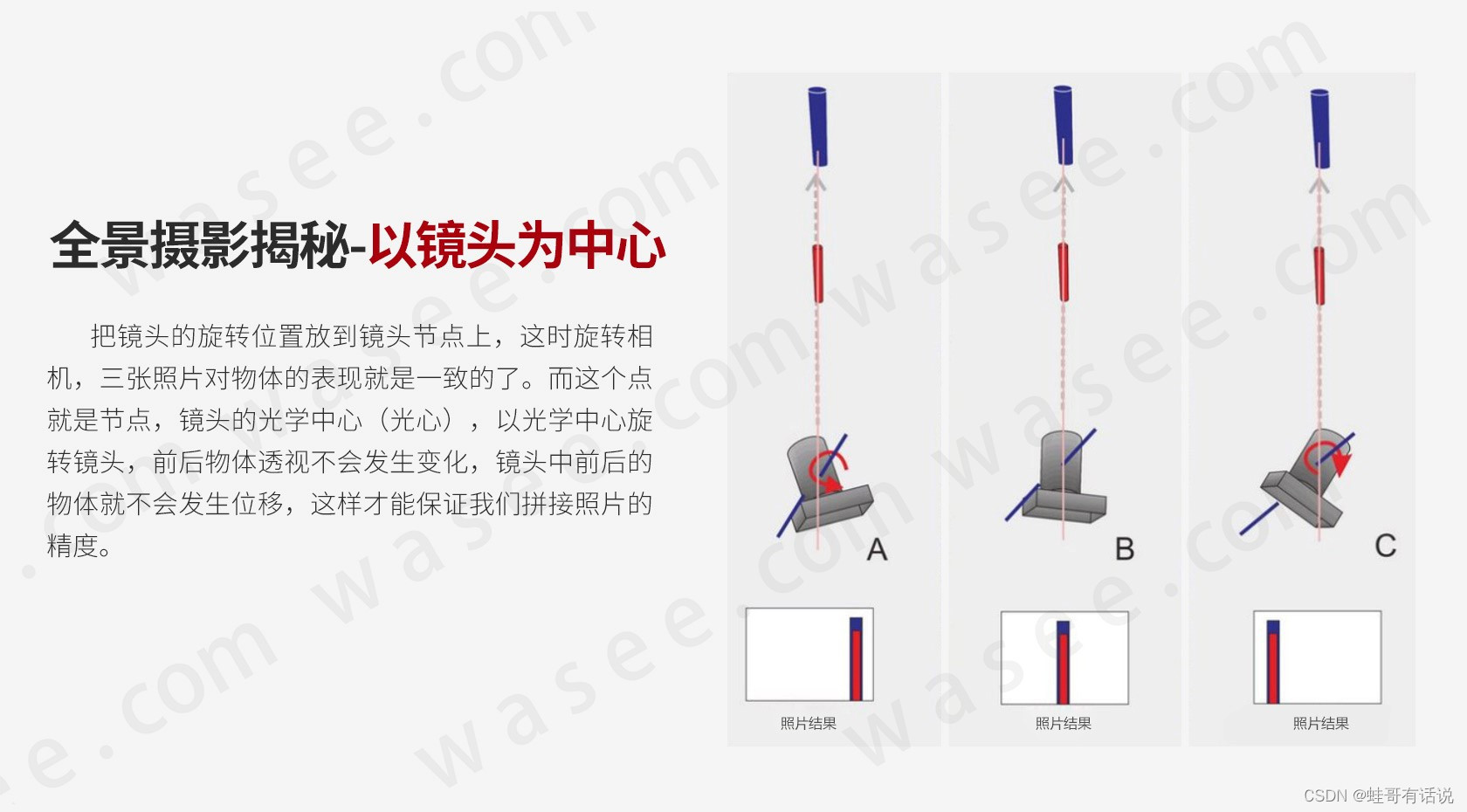
0基础学习VR全景平台篇第134篇:720VR全景,云台调整节点
相机、云台和脚架全套设备组装完成后需要进行调校才能开始拍摄。这一节,我们将主要介绍云台调整的两个内容:对中心靶、调三点一线。(后附调校原理) 云台部件名称 一、调节准备 (一)对于安装好的云台 1.检查气泡水平仪,通过调整脚架达到水平。 2.将承载板转动至竖直向上,上齿盘刻度线对准下齿盘0°和180°,以确保板架没有倾斜。 3.检查水平旋转刻度盘,刻度对准0°。 安装检查


树莓派,opencv,Picamera2利用舵机云台追踪人脸(PID控制)
一、需要准备的硬件 Raspiberry Pi 4b两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)二自由度舵机云台(如下图)Raspiberry CSI 摄像头 组装后的效果: 二、项目目标 追踪人脸: 当人脸移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把该人脸放到视界的中心位置,本文采用了PID控制伺服电机 三、具体步骤 3.1

树莓派,mediapipe,Picamera2利用舵机云台追踪人手(PID控制)
一、项目目标 追踪人手大拇指指尖: 当人手移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把大拇指指尖放到视界的中心位置,本文采用了PID控制伺服电机 Mediapipe Hand简介 MediaPipe 手部标志任务可检测图像中手部的标志。 您可以使用此任务来定位手的关键点并在其上渲染视觉效果。 该任务使用机器学习(ML)模型作为静态数据或连续流对图像数据进行操作,并输出图像坐标中的

树莓派,opencv,Picamera2利用舵机云台追踪特定颜色对象(PID控制)
一、需要准备的硬件 Raspiberry 4b两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)二自由度舵机云台(如下图)Raspiberry CSI 摄像头 组装后的效果: 二、项目目标 追踪特定颜色的物体: 当物体移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把该物体放到视界的中心位置,我在这里追踪的是一支黄色的铅笔。 三、具体步骤
树莓派,opencv,Picamera2利用舵机云台追踪特定颜色对象(PID控制)
一、需要准备的硬件 Raspiberry 4b两个SG90 180度舵机(注意舵机的角度,最好是180度且带限位的,切勿选360度舵机)二自由度舵机云台(如下图)Raspiberry CSI 摄像头 组装后的效果: 二、项目目标 追踪特定颜色的物体: 当物体移动时,摄像头通过控制两个伺服电机(分别是偏航和俯仰)把该物体放到视界的中心位置,我在这里追踪的是一支黄色的铅笔。 三、具体步骤