三点专题
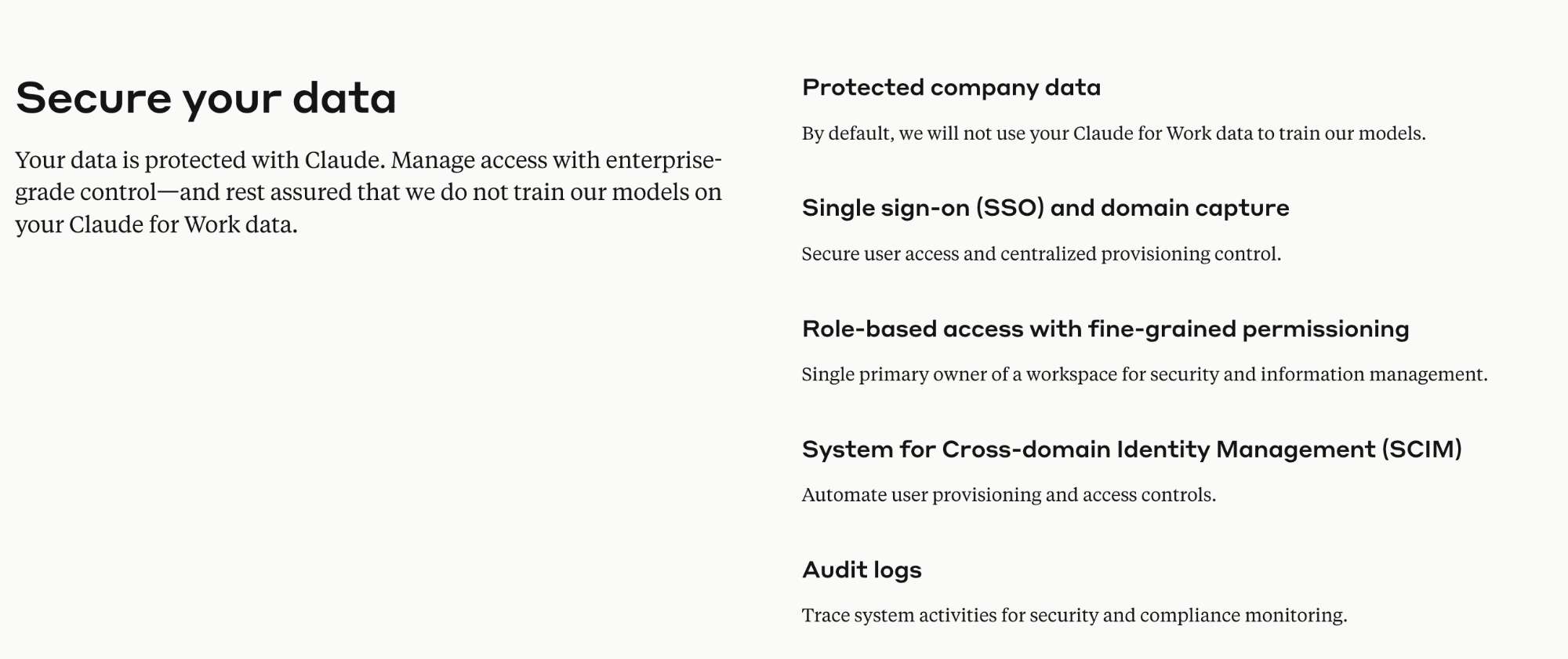
Claude推出Enterprise企业计划!有这三点值得B端产品借鉴!
大家好,我是木易,一个持续关注AI领域的互联网技术产品经理,国内Top2本科,美国Top10 CS研究生,MBA。我坚信AI是普通人变强的“外挂”,专注于分享AI全维度知识,包括但不限于AI科普,AI工具测评,AI效率提升,AI行业洞察。关注我,AI之路不迷路,2024我们一起变强。 企业(B端)客户对于AI公司来说一直是兵家必争之地,不管是国内AI还是国外AI,比如百度文心、阿里通义、O

css三点闪烁(可用于加载样式、标题等)
代码案例 HTML <div class="flexAlign loading"><div class="loading_item"></div><div class="loading_item"></div><div class="loading_item"></div></div><div class="other_title">安全联动</div><div class="flexA

三点顺序 简单数学问题
三点顺序 参考博客 https://blog.csdn.net/Jamence/article/details/77608659 https://blog.csdn.net/liangzhaoyang1/article/details/50854201 这两篇博客已经很好。我只是借鉴一下,自己写写代码。 说明 -1. 这种题目需要充分了解背后的数学知识。 -2. 解析几何中叉乘计算方

35岁,做好这三点,我和职场焦虑就和解了
工作时静不下心,休息时辗转难眠;一天24小时困在微信工作群,想读读书,也静不下来。不知道什么样的生活是自己想要的,但也知道有一些生活是自己不想要的,这些都暗示你可能处于“职场焦虑”之中。 伴随着改革开放成长起来的新一代的中国人,在面临着社会转型和高度增长减速的关键时期,大学毕业后都踌躇满志地想去施展抱负,可很多同学去了北上广深一线大城市打拼

视觉平面简易三点标定
如果只通过三个点来建立转换关系,通常我们考虑的是二维平面上的仿射变换,而不是相机标定中的三维空间变换。这意味着我们假设所有的测量点都位于同一个平面上,且相机也是平行于这个平面的。基于这样的假设,可以通过这三个点来计算一个2D仿射变换矩阵,然后利用这个矩阵将像素坐标转换为该平面上的机械坐标。 以下是使用C#进行计算的一个简单示例: using System;using MathNet.Nume


做视频号小店什么类目最容易爆单?其实,弄懂这三点就会选品了
大家好,我是电商花花。 我们做视频号小店做什么类目最容易爆单? 其实任何类目都有属于自己的受众人群和客户,都非常容易爆单,我们想要爆单,就要选对类目,选对产品。 视频号上所有的类目基本上可以分为标品,非标品,和半标品,这第三大类。 标品,就是百货、食品、家居、日用品、3C、五金等类目。 比如食品,我们会发现这个类目的产品基本都是一样,还有像日用品,零食等,单从外观上看跟其它同行产品没
站长分享网站优化都有哪些要素,要谨记三点
网站优化都有哪些要素呢?济南网站制作总结了以下三点: 一、优化网站域名。从们一开始决议要做一个新的网站开端,域名就是站长们重要考虑的问题,域名的是非,域名和症结词的相关度,域名的意思,域名的后缀等等,这些都是站长们要去取舍的。域名最好是选用英文字母,最好是要害词的拼音,或是本人站点的名称拼音;域名不要抉择的过长,过长的域名不便利用户的记忆。 二、优化网站静态页。网站的静态页跟动态页对网站的服务

go语言中的三点 ... 用法
在go语言中 三点 ... 特殊用法在不同的地方有不同的意义,在不同的地方使用...的意义不同,如下: 1. 在定义数组[...]时的数组容量处的...表示由编译器自动计算数组元素大小,如: // 数组定义 这个是手动指定数组大小arr1 := [2]string{"Hello", " World"}// 由编译器自动计算数组元素,这个和上面的效果一样arr2 := [...]stri
为什么OceanBase不适合银行的三点思考
(本质上CAP的需求不一样、tradeoff不一样!) 何种架构才是银行的正确选择?我们从三个方面来分析论证。 一,分布式与集中式数据库的分别 在业务体系上,支付宝和银行在业务逻辑、监管方式、数据要求上完全不同;业务决定技术,这也造成了不同的技术路径。需要强调的是,尽管两种不同的技术路径,但技术原理却是相同的。分布式和集中式数据库各有优缺点,也就各有不同的适用环境。 2002年,麻
SEO优化6月新步法!三点让你领悟
我们在一起培训人聊起昨日是你儿子的节日,今天是你的节日,这个是个玩笑下面我们来谈谈优化是一项漫长的工作,在整个优化的过程中会遇到各种各样的问题,尤其在标题优化的过程中,更应该学会避免一些优化的误区,掌握一定的优化技巧,那么在标题优化的过程中有哪些技巧? 优化给你分享三大点重要事项。您所在的公司名称,不止能够将你的结果列表与竞争对手区分开来,与此同时还能够帮助您的网站带来更多的点击率,有效帮助您提

关于数据库中的事务(transaction),程序员必须记住的三点
关于数据库中的事务(transaction),程序员必须记住的三点 1. 对于程序员来说,理解事务以及并发事务的概念非常重要。下面先通过银行的转帐业务以及演示案例帮助大家建立并深入理解事务。 以下这段代码模拟我们在银行要完成的转账业务。研读以下代码,判断哪些SQL语句必须看作一个逻辑单元,即这些语句要执行成功都得成功;若有一条语句不能成功执行

拓嘉启远电商:拼多多转化率提高靠三点
转化率=产生购买行为的客户人数/所有到达店铺的访客人数*100%。也就是如果要提高拼多多的转化率,那就是要在保证你店铺的访客数量的情况下使得店铺的购买人数增多。那么拼多多转化率该怎样提高呢? 1、商品质量 虽然拼多多的一个很明显的标签就是便宜,但是并不是便宜你就可以理所当然的出售劣质产品,这样是卖不出去的,就算卖出去了也没有回头客,一次不好,终身不买。没有人想来你的店铺进行二次消费的,所以店铺

C#事件演示程序2)——写事件的三点注意,以及常用的事件处理模型
今天又思考了一下C#的事件处理。 如果在一个类A中定义一个事件,在类B中触发事件,然后让订阅了类A的事件的类C执行对应的方法,该怎么办? 我试了一下,竟然不能执行: using System; using System.Collections.Generic; using System.Text; namespace ConsoleApplication3 ...
一个人怎么做视频号小店?做好这三点核心步骤,你也行
大家好,我是电商花花。 今天给大家发分享一下2024年最赚钱,最容易做起来的一个项目,没有之一,它就是靠信息差新崛起的项目,视频号小店。 有了解过的也都知道现在视频号小店无货源是非常红火的,想做的也不妨听听视频号小店这个项目,一定能学到不少干货。 而想要做好视频号小店,想要在视频号小店上出单、赚钱,只需要经过这几步就能做好一家店铺。 1、选品 视频号小店和其它平台上的电商一样都需要选

为什么要选择高清监控摄像头?这三点你肯定要知晓
现在市面上很多号称千万像素的高清摄像机,这种存在吗?如果有的话,那么就不是几百元可以解决的问题。可以很负责任的说,目前标准的家用监控器像素都能够达到100W,另外还有130W以及200万像素的高清摄像机。如果有一款家用监控器能够达到千万,那么规格肯定贵得离谱。当然,不排除用软件刷机或者手机APP上显示4K高清分辨率的情况。 我们都知道买监控摄像机就需要买高清的,但是你知道为什么要买高清监控摄像机
基于左逆的三点法测距,MATLAB函数
基于左逆的三点法MATLAB程序 不一定能用,可以借鉴,在锚点数量极少的时候,右拟无法使用,可以使用这个左逆(当然,直接用pinv也行) function [p_out] = triposition(R_calcu,baseP)% p = [5,5;10,9;15,12;20,22;25,3]; %real locationbaseX_ = baseP(:,1);baseY_ = bas
【MATLAB函数】三点法定位+权重
三点法 通过测距,使用最小二乘法定位,用于UWB、WIFI、zigbee的定位等。 函数作用 输入与知点(锚点)的距离、锚点坐标、权重,输出待定位点的坐标。 程序源码 function [p_out] = triposition_weight(R_calcu,baseP,varargin)% p = [5,5;10,9;15,12;20,22;25,3]; %real location

2024年抖音小店应该怎么做?这三点才是转折点,早会早富
大家好,我是电商花花。 每年都会有新人做抖店,这是一个很正常的事情,毕竟抖音小店这个低成本高收益的项目还是吸引人的。 而2024年的抖音小店也不例外,当下抖音小店仍然是抖音重点扶持的项目,不管是从流量还是市场,或者政策来看,抖音小店对于大多数新商家来说,依然是非常友好的。 那么,作为最欢迎最热门的抖音小店我们应该怎么做呢? 今天花花给大家分享做店最重要的三点,做好这三点就能帮你
【运动控制】三点定圆
//三点定圆EXTERN_C short WINAPI _Point3(unsigned short Axis,double dDistX1,double dDistY1,double dDistX2,double dDistY2,double dDistX3,double dDistY3,short Position_Mode = 0, unsigned short CardNum

java 三点求角度_求给定三个点的夹角
求给定三个点的夹角,其实是求$$$$两个向量之间的夹角$$\alpha$$。本文采用如下公式求解。 $$\cos{\alpha}=\frac{{A}\times{B}}{\|A\|\|B\|}$$ 源代码如下: double getAngleByThreeP(double pointx[3], double pointy[3]) { double a_b_x = pointx[0] - poin

PMP - 三点估算的一个题目
题目: 你与项目团队把三点估算方法应用于具体两个活动的关键路径上。下列历时的不确定性都基于+-3西格玛置信区间。历时不确定性(定义是最悲观估算-最乐观估算),活动一是18天,活动二是24天,使用PERT公式法,整个关键路径的历时不确定性是多少? A. 21天 B. 30天 C. 42天 D. 根据所给信息无法估算 串联

零基础怎么转行3D建模?想学好次世代建模,这三点都是重中之重
我觉得,不管怎样,转行都是一件需要勇气的事情。如果真的想转行的话,建议去仔细考虑考虑。 当然了,这种敢于去追逐自己的梦想的这种精神本身就很了不起。下面就给每个想转行学习建模的朋友一点建议吧。 零基础小白学次世代3D建模主要从下面这三个方面学: 一是软件的熟练度,主要看你想走哪个方向,基本主流的软件还是要掌握的,不管你是想走游戏方向还是影视方向,3Dmax,zbrush,Ma

品牌如何做好话题营销?这三点很关键
从“野性消费”到“疯四文学”,这些品牌让人记住的并不是某个内容,而是一个社交谈资,这些都算是成功的品牌话题,品牌话题的优势在于激活品牌,始终保持品牌活力,今天媒介盒子就来和大家聊聊:品牌如何做好话题营销。 一、 品牌需求为导向 品牌需求大致分为使品牌持续发展或者打出品牌知名度,那么以品牌的哪一种特质作为话题点需要梳理清楚。许多品牌为了制造热度都会蹭热点,但是这都不是从品牌需求

网站是否进行过SEO网站优化?主要就看这三点!
网站优化现在基本是一个网站的标配,也就是我们所说的SEO(搜索引擎优化),至于一个网站是否优化过或者有没有优化方面的操作,对于懂行的人来说基本打开网站的一刹那就能知晓。 其实,就算你没有SEO方面的知识,只要知道这三点也能看破一个网站的优化与否,不信就请继续往下阅读: 1、首先一点也就是最为重要的,那就是看一个网站的三大标签:TITLE/KEYWORD/DESCRIPTION,如果不全,那铁定

关于数据科学,书上不曾提及的三点经验
关于数据科学,书上不曾提及的三点经验 发表于 2015-09-10 23:33| 445次阅读| 来源 Mikio L. Braun Blog| 0 条评论| 作者 Mikio L. Braun 大数据 分布式计算 机器学习 深度学习 特征提取 width="22" height="16" src="http://hits.sinajs.cn/A1/weibo