webots专题

Webots入门(二)-build up a controller
A simple controller 控制器程序读取传感器的值,然后修改行走速度来避开障碍物。 下面是控制器源代码mybot_simple.c: #include<webots/robot.h>#include<webots/differential_wheels.h>#include<webots/distance_sensor.h>#define SPEED 60#defi
Webots入门(一)-build up a world
以Webots的guide.pdf为例建立一个拥有a floor, four obstacles 和 a surrounding wall的环境。我想大部分人都可以照着guide一步一步实现整个world的建立,但是对于其中的组件的使用不是特别理解,比如为什么要用这个组件,不用另外的组件。这里跳过色彩方面的讲解,因为自己也不是很了解。下面进入正题: 先上一张感性

Webots并联四足机器人仿真
并联四足机器人仿真: 1.机器人整机仿真: 1)基于位置控制&PID算法&运动学逆解 2)足端轨迹:摆线 3)步态:Trot步态,转向步态,跳跃(跳跃,跳转,猫跳,后空翻) 并联单腿仿真: 一条并联单腿模型+控制器代码(验证位置控制和运动学逆解,足端轨迹) 版本:webots R2021b vx:LibFreeCx330,csdn私信我可能无法及时看到 四足机器人 vx:
ROS2高效学习第十章 -- ros2 高级组件其四之 webots
ros2 高级组件其四之 webots 1 前言和资料2 正文2.1 webots 引入和学习资料2.2 webots 安装以及样例测试2.3 自编写 webots_demo 3 总结 1 前言和资料 当前,在机器人仿真领域,有两大产品比较突出,一是来自 ros 社区的 gazebo,二是从商业转向开源的 webots。通常情况下,ros 的学习者都会深入研究 gazebo,比如

webots学习记录8:R2023b如何在某个零件上添加一个恒定的力(矩)
在webots安装路径下,从include\controller\c\webots\supervisor.h中可以看到如下定义: void wb_supervisor_node_add_force(WbNodeRef node, const double force[3], bool relative);void wb_supervisor_node_add_force_with_offse

Windows环境编译webots遇到报错:‘gbk‘ codec can‘t decode byte 0x93 in position 547
Windows环境下编译webots的官方说明在 https://github.com/cyberbotics/webots/wiki/Windows-installation/ ,概括起来就是:先安装MYSYS2,然后git clone --recurse-submodules -j8 https://github.com/cyberbotics/webots.git ,最后make -j16
Webots实现大疆Mavic2pro无人机定点飞行
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、将无人机当成一个对象1.1定义无人机相关属性1.2定义用于控制无人机运动的代码1.3主函数实现无人机的点位固定和飞行检测 二、用键盘控制测试代码三、效果展示四、注意点 前言 由于项目要求,现在需要做一个能够实现无人机根据事先给定的点位实现定点飞行,这里由于webots的跨平台性,考虑使

Webots中使用大疆“御”2专业版-DJI-Mavic 2 Pro进行无人机仿真实践
兼顾体积和性能的超强无人机大疆-“御”-DJI-Mavic现在有了Webots仿真版,可以零成本愉快玩耍了。 Webots-Mavic 控制器支持C++、Python,并全面支持ROS。 DJI-Tello:https://blog.csdn.net/ZhangRelay/article/details/99291395 Webots-ROS:https://blog.csdn.

webots之Robotis OP2机器人(DARwIn-OP)
Robotis OP2机器人 Robotis OP2Motors and Position SensorsLEDsAccelerometerGyroscopeCameraSpeakerManagersGait ManagerMotion ManagerVision Manager PositionSensorRobot WindowAccelerometers TabGyro TabMoto
Webots将节点复制到不同工程中
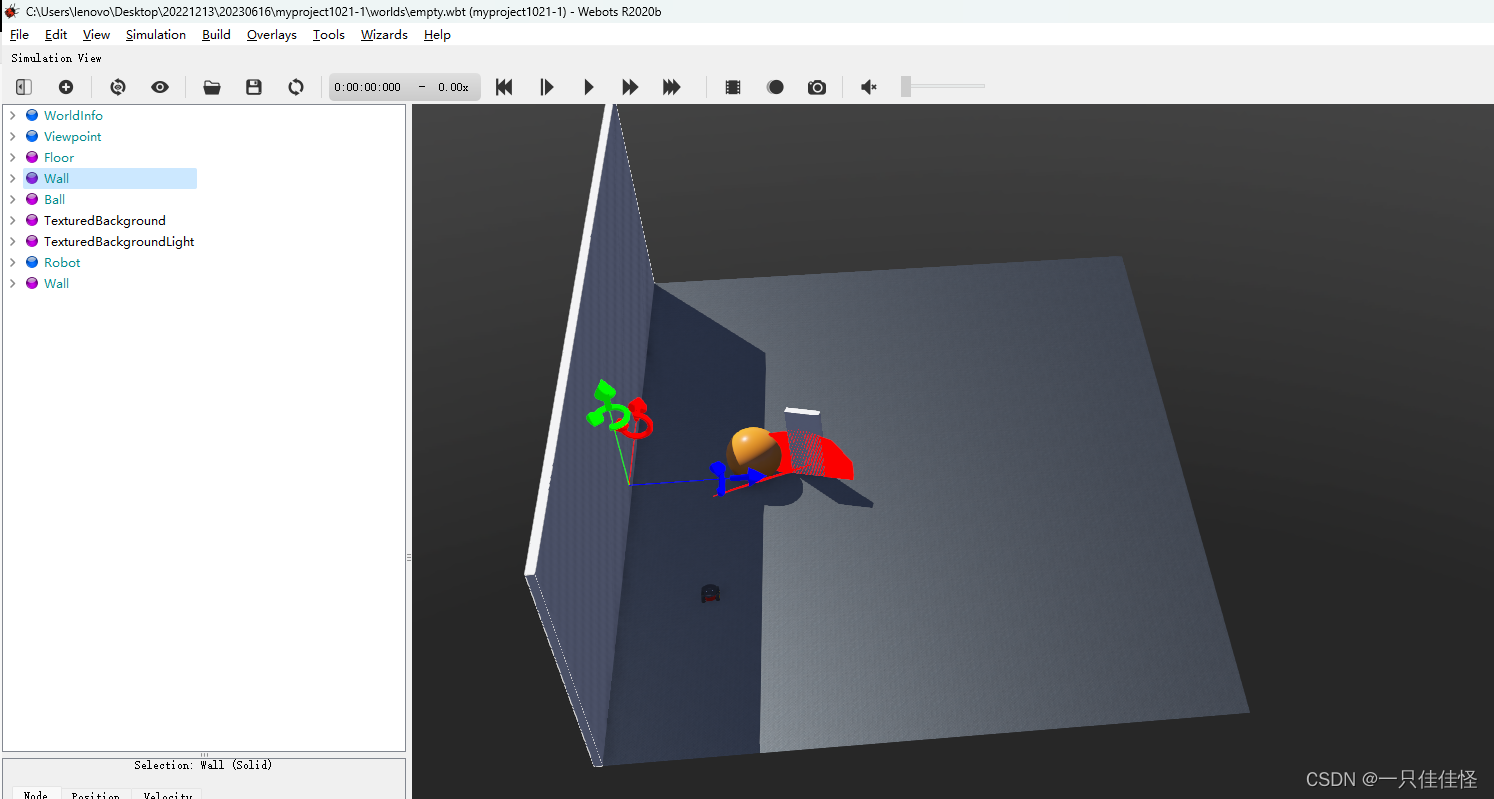
我们要将A工程的节点复制到B工程中。 先将两个工程调成未开始仿真模式 将A中的节点复制 选中节点wall,右击选择Export然后保存为.wbo格式 打开B工程 点击新增,再点击Import,选择刚刚导出的文件 成功导入
Webots中Spot或SpotMini案例-焦 虑 腾 空-
"Spot "机器人,此前被称为 "SpotMini",是波士顿动力公司开发的一款四条腿的类似狗的机器人。 详细介绍的短视频在文末,如需简要了解,不必观看视频,个人一直觉得视频的时间成本很高,流量成本很高,制作成本也很高,这三高是相对于图文博客而言。 焦虑的Spot 这款敏捷的机器人身高83厘米,可以完成各种搜索、检查和运送任务。它能以前所未有的速度攀爬楼梯和穿越崎岖的地形,
![[搬运]Webots 入门教程 2](https://img-blog.csdnimg.cn/20200715163333777.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3d5eGV6,size_16,color_FFFFFF,t_70)
[搬运]Webots 入门教程 2
Webots Tutorial 2 Modification of the environment A new simulation 这里我们直接在原来的my_first_simulation.wbt基础上,选择另存为obstacles.wbt,就可以创建一个原来的副本。 Modifying the floor 现在来演示一下如何改变地板样式 在3d视图红点击地板,右键delete 点击

E-puck2-webots下的仿真实现
Webots是专业的移动机器人仿真软件包。它提供了快速的原型制作环境,使用户可以创建具有物理特性(例如质量,关节,摩擦系数等)的3D虚拟世界。用户可以添加简单的被动对象或称为移动机器人的主动对象。这些机器人可以具有不同的移动方案(轮式机器人,有腿机器人或飞行机器人)。此外,它们可能配备有许多传感器和执行器设备,例如距离传感器,驱动轮,摄像机,马达,触摸传感器,发射器,接收器等。最后,用户可以对每个

ROS联合Webots扩展(二)通过语音控制机器人方案
通过语音控制机器人方案 注意: 再学习本系列教程时,应该已经安装过ROS了并且需要有一些ROS的基本知识此教程以webots_demo为基础 ubuntu版本:20.04 webots版本:2021a ros版本:noetic 0.前言 目前语音机器人已经非常普遍,那我们想要搭建自己的低成本语音识别平台该如何实现呢? 图一就是笔者使用的方案,这个方案成本较低,但是环境搭建复杂。 语音