本文主要是介绍Webots中Spot或SpotMini案例-焦 虑 腾 空-,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
"Spot "机器人,此前被称为 "SpotMini",是波士顿动力公司开发的一款四条腿的类似狗的机器人。
详细介绍的短视频在文末,如需简要了解,不必观看视频,个人一直觉得视频的时间成本很高,流量成本很高,制作成本也很高,这三高是相对于图文博客而言。
这款敏捷的机器人身高83厘米,可以完成各种搜索、检查和运送任务。它能以前所未有的速度攀爬楼梯和穿越崎岖的地形,但它的体型却足够小,适合在室内使用。它是一个坚固耐用的(IP54防尘和防潮保护)和可定制的平台。Spot可以去轮式机器人无法去的地方,同时携带的有效载荷的耐力远超空中无人机。最大速度为1.6米/秒,续航时间为90分钟,电池可更换。Spot使用5个立体摄像头(360度视觉),在动态工作场所移动时,可以避开障碍物和人。
附上参考网址(非点击打开的链接,请复制打开)
教程说明:https://cyberbotics.com/doc/guide/spot模型网址:https://github.com/cyberbotics/webots/tree/master/projects/robots/boston_dynamics软件下载:https://cyberbotics.com/#download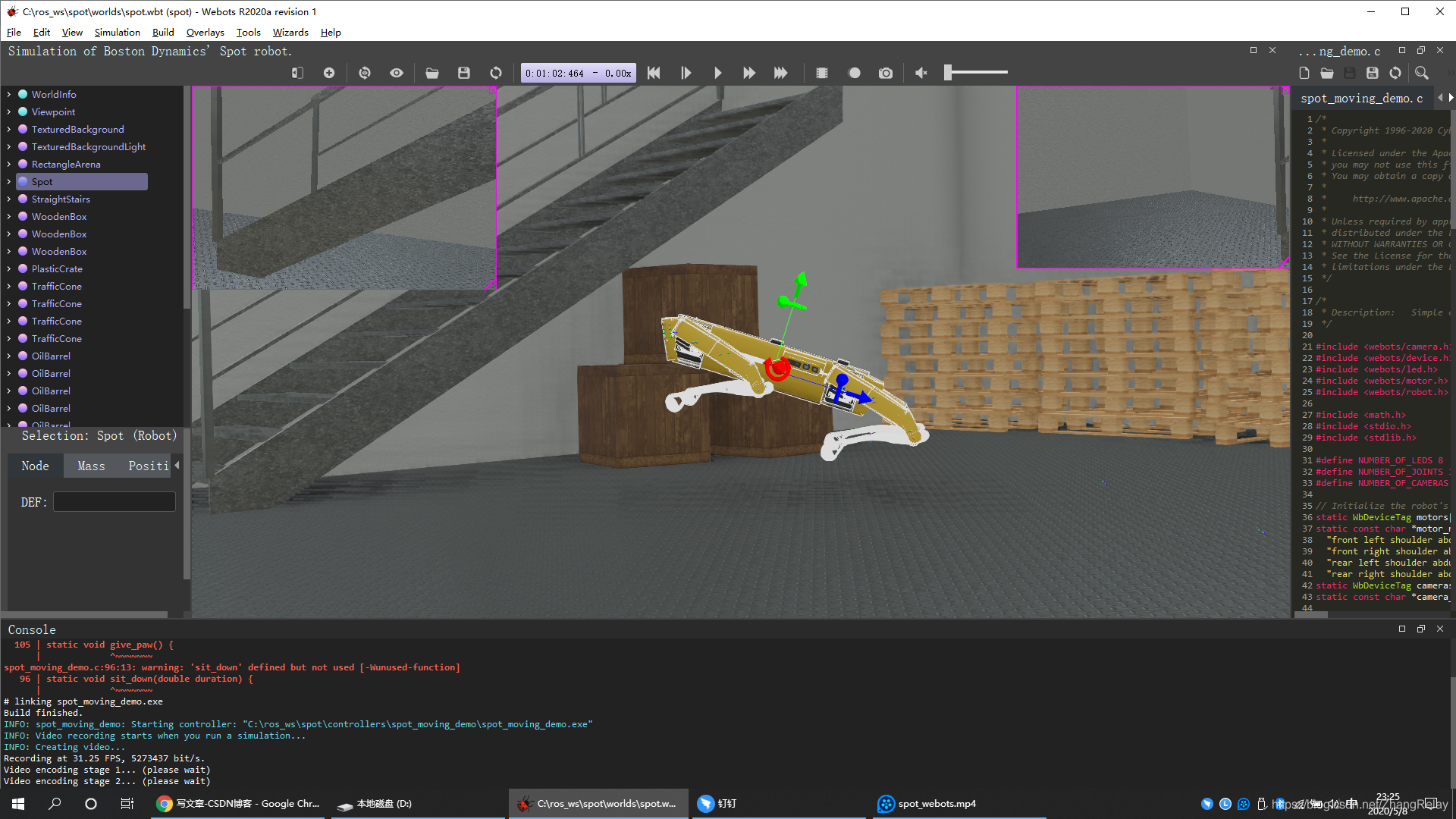
上图可以看到webots软件界面,腾空时前后摄像头的图像也在仿真窗口左上和右上显示。
如上运动效果的代码如下:
/** Copyright 1996-2020 Cyberbotics Ltd.** Licensed under the Apache License, Version 2.0 (the "License");* you may not use this file except in compliance with the License.* You may obtain a copy of the License at** http://www.apache.org/licenses/LICENSE-2.0** Unless required by applicable law or agreed to in writing, software* distributed under the License is distributed on an "AS IS" BASIS,* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.* See the License for the specific language governing permissions and* limitations under the License.*//** Description: Simple controller to present the Spot robot.*/#include <webots/camera.h>
#include <webots/device.h>
#include <webots/led.h>
#include <webots/motor.h>
#include <webots/robot.h>#include <math.h>
#include <stdio.h>
#include <stdlib.h>#define NUMBER_OF_LEDS 8
#define NUMBER_OF_JOINTS 12
#define NUMBER_OF_CAMERAS 5// Initialize the robot's information
static WbDeviceTag motors[NUMBER_OF_JOINTS];
static const char *motor_names[NUMBER_OF_JOINTS] = {"front left shoulder abduction motor", "front left shoulder rotation motor", "front left elbow motor","front right shoulder abduction motor", "front right shoulder rotation motor", "front right elbow motor","rear left shoulder abduction motor", "rear left shoulder rotation motor", "rear left elbow motor","rear right shoulder abduction motor", "rear right shoulder rotation motor", "rear right elbow motor"};
static WbDeviceTag cameras[NUMBER_OF_CAMERAS];
static const char *camera_names[NUMBER_OF_CAMERAS] = {"left head camera", "right head camera", "left flank camera","right flank camera", "rear camera"};
static WbDeviceTag leds[NUMBER_OF_LEDS];
static const char *led_names[NUMBER_OF_LEDS] = {"left top led", "left middle up led", "left middle down led","left bottom led", "right top led", "right middle up led","right middle down led", "right bottom led"};static void step() {const double time_step = wb_robot_get_basic_time_step();if (wb_robot_step(time_step) == -1) {wb_robot_cleanup();exit(0);}
}// Movement decomposition
static void movement_decomposition(const double *target, double duration) {const double time_step = wb_robot_get_basic_time_step();const int n_steps_to_achieve_target = duration * 1000 / time_step;double step_difference[NUMBER_OF_JOINTS];double current_position[NUMBER_OF_JOINTS];for (int i = 0; i < NUMBER_OF_JOINTS; ++i) {current_position[i] = wb_motor_get_target_position(motors[i]);step_difference[i] = (target[i] - current_position[i]) / n_steps_to_achieve_target;}for (int i = 0; i < n_steps_to_achieve_target; ++i) {for (int j = 0; j < NUMBER_OF_JOINTS; ++j) {current_position[j] += step_difference[j];wb_motor_set_position(motors[j], current_position[j]);}step();}
}static void lie_down(double duration) {const double motors_target_pos[NUMBER_OF_JOINTS] = {-0.40, -0.99, 1.59, // Front left leg0.40, -0.99, 1.59, // Front right leg-0.40, -0.99, 1.59, // Rear left leg0.40, -0.99, 1.59}; // Rear right legmovement_decomposition(motors_target_pos, duration);
}static void stand_up(double duration) {const double motors_target_pos[NUMBER_OF_JOINTS] = {-0.1, 0.0, 0.0, // Front left leg0.1, 0.0, 0.0, // Front right leg-0.1, 0.0, 0.0, // Rear left leg0.1, 0.0, 0.0}; // Rear right legmovement_decomposition(motors_target_pos, duration);
}static void sit_down(double duration) {const double motors_target_pos[NUMBER_OF_JOINTS] = {-0.20, -0.40, -0.19, // Front left leg0.20, -0.40, -0.19, // Front right leg-0.40, -0.90, 1.18, // Rear left leg0.40, -0.90, 1.18}; // Rear right legmovement_decomposition(motors_target_pos, duration);
}static void give_paw() {// Stabilize postureconst double motors_target_pos_1[NUMBER_OF_JOINTS] = {-0.20, -0.30, 0.05, // Front left leg0.20, -0.40, -0.19, // Front right leg-0.40, -0.90, 1.18, // Rear left leg0.49, -0.90, 0.80}; // Rear right legmovement_decomposition(motors_target_pos_1, 4);const double initial_time = wb_robot_get_time();while (wb_robot_get_time() - initial_time < 8) {wb_motor_set_position(motors[4], 0.2 * sin(2 * wb_robot_get_time()) + 0.6); // Upperarm movementwb_motor_set_position(motors[5], 0.4 * sin(2 * wb_robot_get_time())); // Forearm movementstep();}// Get back in sitting postureconst double motors_target_pos_2[NUMBER_OF_JOINTS] = {-0.20, -0.40, -0.19, // Front left leg0.20, -0.40, -0.19, // Front right leg-0.40, -0.90, 1.18, // Rear left leg0.40, -0.90, 1.18}; // Rear right legmovement_decomposition(motors_target_pos_2, 4);
}int main(int argc, char **argv) {wb_robot_init();const double time_step = wb_robot_get_basic_time_step();// Get camerasfor (int i = 0; i < NUMBER_OF_CAMERAS; ++i)cameras[i] = wb_robot_get_device(camera_names[i]);// enable the two front cameraswb_camera_enable(cameras[0], 2 * time_step);wb_camera_enable(cameras[1], 2 * time_step);// Get the LEDs and turn them onfor (int i = 0; i < NUMBER_OF_LEDS; ++i) {leds[i] = wb_robot_get_device(led_names[i]);wb_led_set(leds[i], 1);}// Get the motors (joints) and set initial target position to 0for (int i = 0; i < NUMBER_OF_JOINTS; ++i)motors[i] = wb_robot_get_device(motor_names[i]);while (true) {
// lie_down(4.0);
// stand_up(4.0);
// sit_down(4.0);
// give_paw();
// stand_up(4.0);
// lie_down(3.0);
// stand_up(3.0);
// lie_down(2.0);
// stand_up(2.0);
// lie_down(1.0);
// stand_up(1.0);
// lie_down(0.75);
// stand_up(0.75);lie_down(0.5);stand_up(0.5);lie_down(0.4);stand_up(0.4);lie_down(0.3);stand_up(0.3);lie_down(0.2);stand_up(0.2);lie_down(0.1);stand_up(0.1); }wb_robot_cleanup();return EXIT_FAILURE;
}
可以自己编程实现更多复杂的运动。
在Webots中使用Spot或Spotmini说明
- https://www.bilibili.com/video/bv1Dt4y1y72x
这篇关于Webots中Spot或SpotMini案例-焦 虑 腾 空-的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





