v4l2专题

5 自研rk3566/rk3588+rgbd相机之v4l2-rgb出图框架开发二
自研rk3566/rk3588+rgbd相机之v4l2出图框架开发二 1 v4l2框架介绍打开视频设备文件节点初始化视频设备:启动视频采集:停止视频采集:关闭视频设备节点: 2 linux-v4l2 rgb-sensor出图格式配置配置脚本如下:v4l2-sc2310-cap.sh配置脚本如下:v4l2-gc2093-cap.sh配置脚本如下:v4l2-gc2053-cap.sh 3 lin
v4l2(video4linux2) yuyv(yuv422)、MJPEG、H.264
V4L2(Video4Linux2)是Linux内核中的视频设备接口框架,专门用于捕获和输出视频数据。V4L2广泛应用于各种视频设备的驱动程序开发,如网络摄像头、电视调谐器、视频采集卡、以及其他视频输入/输出设备。 ### V4L2的主要功能 1. **视频采集**: - 通过摄像头、视频采集卡等设备捕获视频数据。 - 支持多种视频格式,如YUYV、MJPEG、H.264等。 2
地平线旭日X3开发板--摄像头驱动是否可以支持v4l2接口?
mipi摄像头,除了调用HB_VIN接口外,是否能支持v4l2接口 ? 因为当前HB_VIN接口是非开源的,很多东西无法看到,也没法改动。 现在有这样的需求,每一帧图像除了分辨率等信息之外, 需要加入更多的图像其他信息,现在好像我无法改动这部分的内容。 比如除了获得一帧图像之外,还要获得该帧图像的时间戳、增益和曝光时间等其他标识信息。 官方回复 目前不支持

第一章 V4L2简介
http://work-blog.readthedocs.org/en/latest/v4l2%20intro.html 1.1、什么是v4l2 V4L2(Video4Linux的缩写)是Linux下关于视频采集相关设备的驱动框架,为驱动和应用程序提供了一套统一的接口规范。 V4L2支持的设备十分广泛,但是其中只有很少一部分在本质上是真正的视频设备: Video capture dev

音视频开发---linux下V4L2拍照
目录 1. 流程说明 2. 代码说明 2.1 摄像头初始化 2.2 启动摄像头 2.3 拍照 2.4 停止摄像头 3. 参考链接 V4L2(Video4linux2),是linux中关于视频设备的内核驱动。在Linux中,我们可以像访问普通文件一样对视频设备进行操作,V4L2也为我们在用户空间操作视频设备提供了一系列接口,使得应用程序可以使用统一的

毕设系列之Linux V4L2(图形图像采集篇)
#PS:要转载请注明出处,本人版权所有 #PS:这个只是 《 我自己 》理解,如果和你的 #原则相冲突,请谅解,勿喷 开发环境:Ubuntu 16.04 LTS 1 虽然介绍Linux V4L2的文章已经满大街了,但是这里我也还要讲一些基本的东西。 1. v4l2 是Video for Linux 2的简称。2. v4l2 不仅仅支持图像类设备,还支持音频等设备类型。3.
V4L2视频采集与H264编码2—v4l2采集YUV数据
在上一篇中因为是在PC机上使用的USB摄像头只能支持GPEG image格式,但是H264编码需要使用YUV数据,所以我找了个ARM开发板来做测试。本以为代码从PC机移植到开发板是很简单的一个事,谁知因为平台或是V4L2底层驱动的不同,最终也是花了九牛二虎之力才把问题给解了。话不多说,直接上代码: [objc] view plain copy /*===========

使用RTMPdump(libRTMP)直播来自v4l2的摄像头数据
转载至:https://blog.csdn.net/li_wen01/article/details/71548079 RTMP是Real Time Messaging Protocol(实时消息传输协议),RTMPdump 封装了RTMP协议的一些接口,使用户使用RTMP协议更加的方便。关于RTMPdump的使用,可以参考博客 linux系统RTMPdump(libRTMP) 通过

全志H616 通过Cedrus和v4l2_request API实现硬件编解码加速(香橙派zero2)
编译安装或加载cedrus驱动模块,加载v4l2-mem2mem Sunxi-Cedrus 致力于为全志 SoC 提供硬件加速的视频解码和编码支持,并将其引入主线 Linux 内核。此外,还为典型的基于 GNU/Linux 的系统提供了与内核驱动程序接口的其他用户空间组件。 Sunxi-Cedrus - linux-sunxi.org 如果你的kernel中不包含sunxi-cedrus驱动

Linux基于V4L2的视频捕捉
简介 linux环境使用V4l2实现摄像头捕捉,界面流畅播放并可以保存图片到本地。 代码 void VideoCapture::run(){qDebug() << "VideoCapture start";// 打开设备int fd = open("/dev/video0", O_RDWR);if(fd < 0){qDebug("video设备打开失败\n");return;}else{q
v4l2抓取rv1126图像
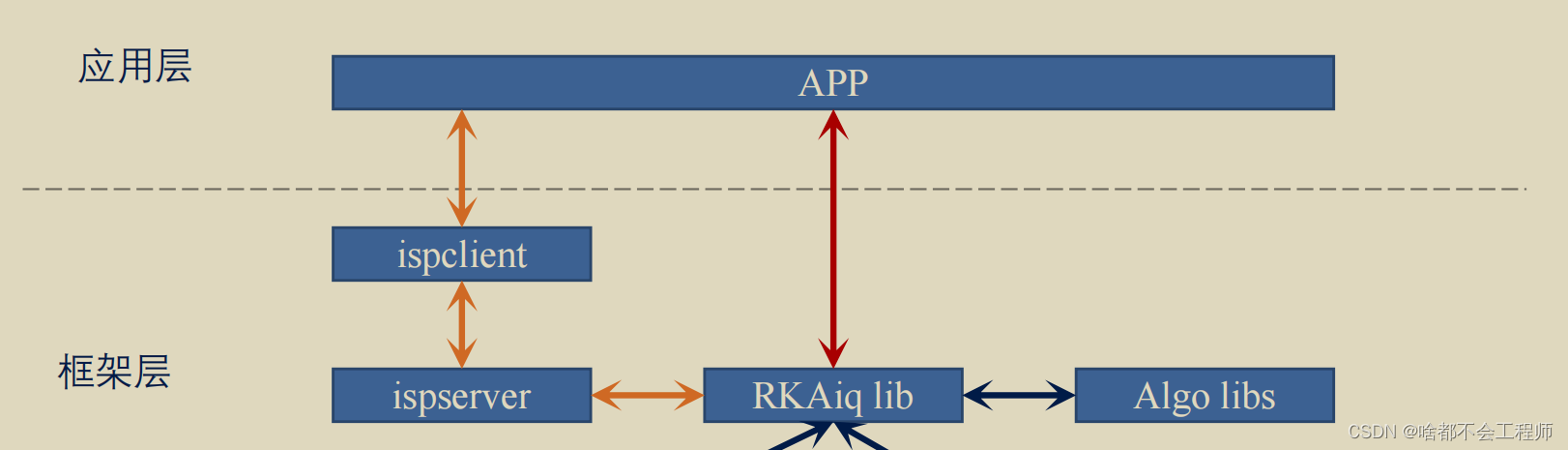
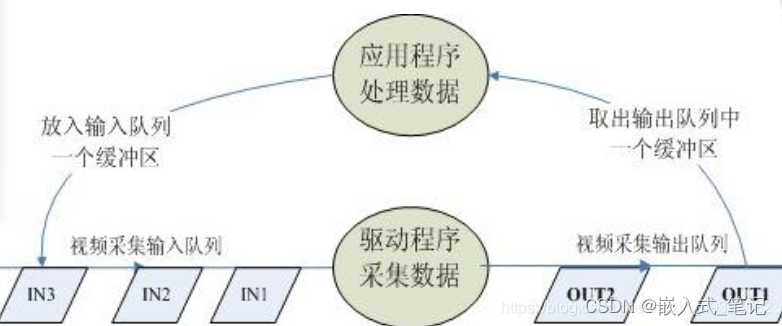
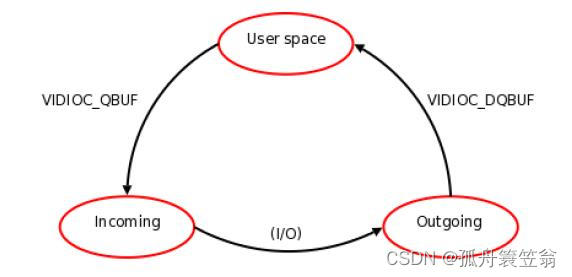
0.准备工作 本文是基于正点原子的rv1126开发板使用mx415摄像头对不同节点的图像进行抓取 1.数据流向 图1 mx415采集到的数据为原始的拜尔格式(也就是raw格式),我们需要通过isp进行图像的调节才符合视觉,其中isp和ispp是两个处理的模块,RKAiq是其调整时候需要用到的文件,如何指定见图4,经过isp和ispp两个模块处理后的数据
RK3568平台(camera篇)V4L2查询获取设置设备
一.查询设备能力VIDIOC_QUERYCAP struct v4l2_capability cap;ioctl(fd, VIDIOC_QUERYCAP, &cap) struct v4l2_capability 结构体描述了视频采集设备的 driver 信息。 struct v4l2_capability{__u8 driver[16]; // 驱动名字__u8 card[32];
深入学习Linux内核之v4l2驱动框架(一)
一,概述 V4L2(Video for Linux 2)是Linux操作系统中用于支持摄像头和视频设备的框架。它提供了一组API和驱动程序接口,用于在Linux系统中进行视频采集、视频流处理和视频播放等操作。 V4L2的设计目标是支持多种设备,包括摄像头、视频采集卡等,并允许应用程序与这些设备通信。通过V4L2,可以实现图片、视频和音频的采集,这些功能在远程会议、可视电话、视频监控系统和嵌入式
深入学习Linux内核之v4l2应用编程(二)
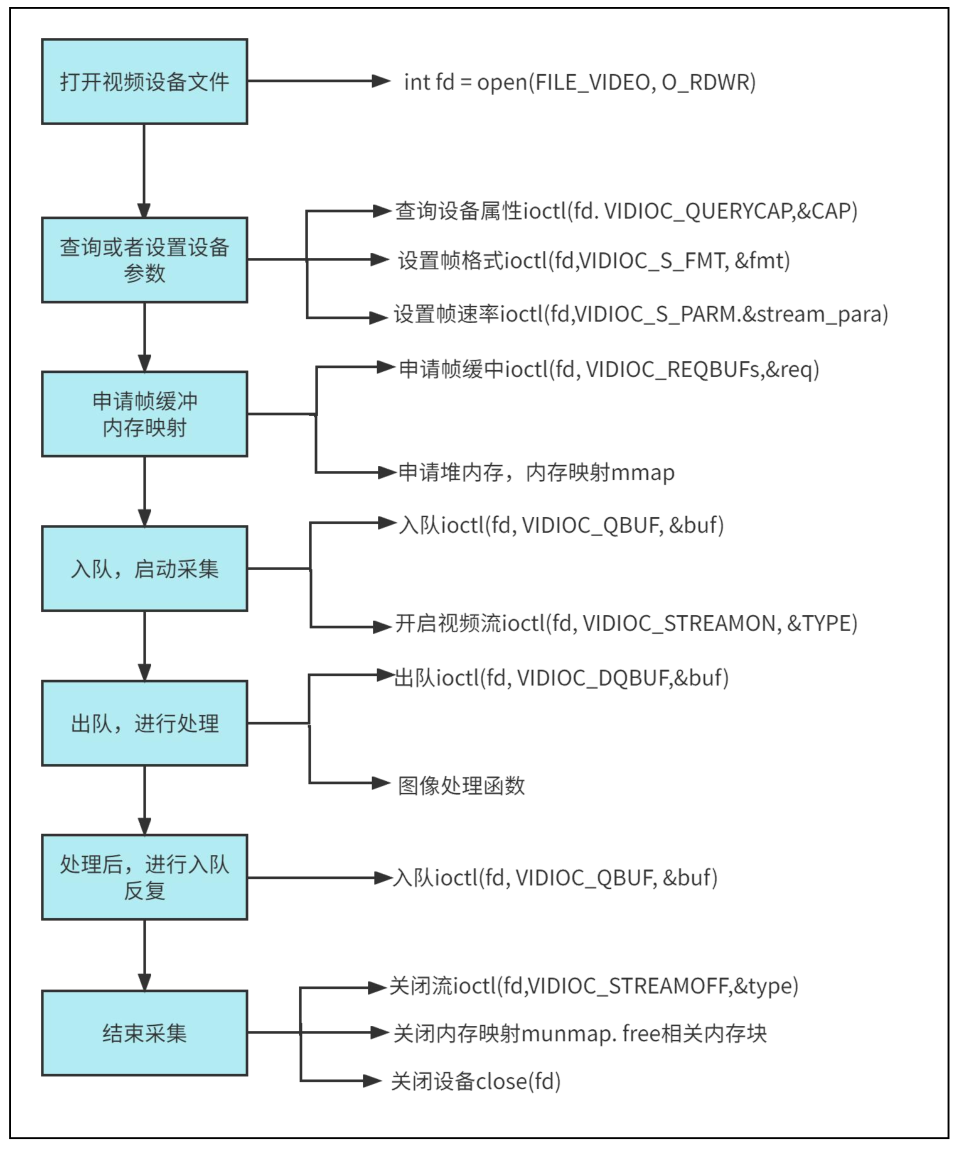
一,用户空间访问v4l2设备步骤 V4L2(Video for Linux 2)是Linux中关于视频设备的内核驱动,它使得Linux系统能够支持视频设备,如摄像头。对于Camera V4L2的应用编程,一般遵循以下步骤: 1,打开设备: 使用open()函数打开视频设备文件,通常位于/dev/videoX(X为设备编号,如0、1等)。 2,查询设备功能: 使用ioctl()函数和VIDIOC
linux学习:视频输入+V4L2
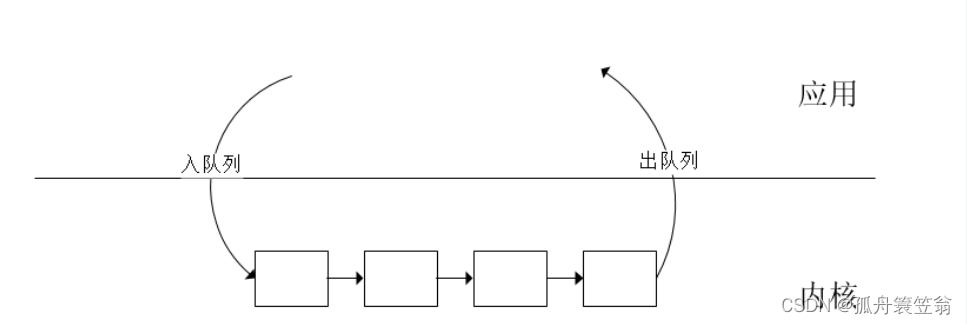
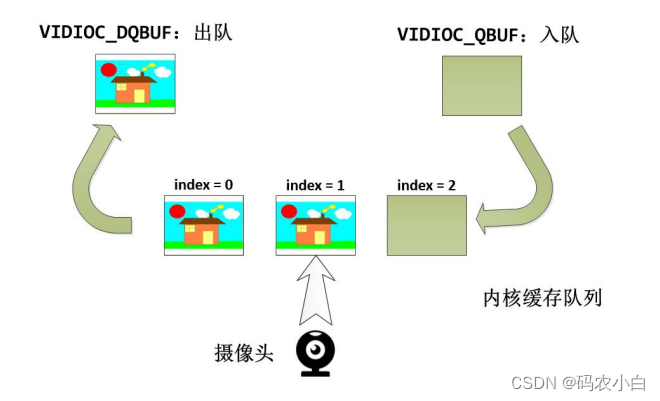
目录 V4L2 视频采集流程 代码例子 核心命令字和结构体 VIDIOC_ENUM_FMT VIDIOC_G_FMT / VIDIOC_S_FMT / VIDIOC_TRY_FM VIDIOC_REQBUFS VIDIOC_QUERYBUF VIDIOC_QBUF /VIDIOC_DQBUF VIDIOC_STREAMON / VIDIOC_STREAMOFF V4L2


v4l2驱动框架分析-对底层寄存器的操作分析
对v4l2的基本知识的理解可以参考以下的博客: http://blog.sina.com.cn/s/blog_65a4a5910101dkat.html https://blog.csdn.net/hktkfly6/article/details/38072935 https://blog.csdn.net/LinuxArmbiggod/article/details/80310445
V4L2调试之(五)
1.关于/dev/mediaX设备的注册,有几个V4L2设备,注册几个/dev/meidaX节点。 比如,插入两个UVC USB Camera,就会出现如下图所示的两个节点,分别用于描述各自的V4L2拓扑。下面是linux上的callstack. [ 86.241290] v4l2_device_register line 21, kworker/2:3 register device

Linux中V4L2使用
Video for Linuxtwo(Video4Linux2)简称V4L2,是V4L的改进版。V4L2是linux操作系统下用于采集图片、视频和音频数据的API接口,配合适当的视频采集设备和相应的驱动程序,可以实现图片、视频、音频等的采集。在远程会议、可视电话、视频监控系统和嵌入式多媒体终端中都有广泛的应用。 1. 命令 查看所有参数 v4l2-ctl -d /dev/video0 --
Linux的视频编程(v4l2编程)
一.什么是video4linux Video4linux2(简称V4L2),是linux中关于视频设备的内核驱动。在Linux中,视频设备是设备文件,可以像访问普通文件一样对其进行读写,摄像头在/dev/video0下。 二、一般操作流程(视频设备): 1. 打开设备文件。 int fd=open(”/dev/video0″,O_RDWR); 2. 取得设备的capability,看看设备具有什

rv1103/buildroot系统中添加包如v4l2
v4l2: rv1103给出的包中已经有v4l,只需要在menuconfig中打开编译选项,步骤如下: 在luckfox的github网站中下载的源代码在~/linux/luckfox/luckfox-pico-main中目录结构如下: 打开编译选项 cd ./sysdrv/source/buildroot/buildroot-2023.02.6/make luckfox_pico_def
收集 V4L2 程序编写
VIDIOC_S_CROP ioctl会传入一个v4l2_crop给驱动程序 crop.c.left, crop.c.top. crop.c.width, crop.c.height定义了一个长方形区域,这个区域是capture或者overlay模式下的取景范围, 举个例子,图片的active(actual) size是720x576, 现在你只想capture或者overlay
yuyv v4l2的数据转换成RGB
使用方法: 3840*2160是.yuv数据的分辨率 data.raw为yuv格式的raw数据 cv:显示 out.png 不显示,存储的文件名 python3 yuv_2_rgb.py data.raw cv 3840 2160或python3 yuv_2_rgb.py data.raw out.png 3840 2160 源码 yuv_2_rgb.py: import
Linux V4L2 应用编程
V4L2:Video4Linux2,是 Linux 内核中的一个框架,提供了一套用于视频设备驱动程序开发的 API。它是一个开放的、通用的、模块化的视频设备驱动程序框架,允许 Linux 操作系统和应用程序与各种视频设备(如摄像头、视频采集卡等)进行交互。 V4L2 提供了一个通用的 API,使应用程序能够访问和控制视频设备,包括获取设备信息、设置设备参数、采集视频数据、控制设备状态等。V4L2