本文主要是介绍全志H616 通过Cedrus和v4l2_request API实现硬件编解码加速(香橙派zero2),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
编译安装或加载cedrus驱动模块,加载v4l2-mem2mem
Sunxi-Cedrus 致力于为全志 SoC 提供硬件加速的视频解码和编码支持,并将其引入主线 Linux 内核。此外,还为典型的基于 GNU/Linux 的系统提供了与内核驱动程序接口的其他用户空间组件。
Sunxi-Cedrus - linux-sunxi.org
如果你的kernel中不包含sunxi-cedrus驱动、v4l2-mem2mem,可能要从源码开始编译该模块。
对于香橙派zero2,sunxi-cedrus视频编解码驱动存在于 Linux 内核源码drivers/staging/media/sunxi/cedrus目录,而v4l2相关支持在drivers/media/v4l2-core/中,通过编译orangepi提供的源码我们可以知道,sunxi-cedrus已被编译为模块但并未加载,需要我们手动加载。
sudo modprobe sunxi-cedrus
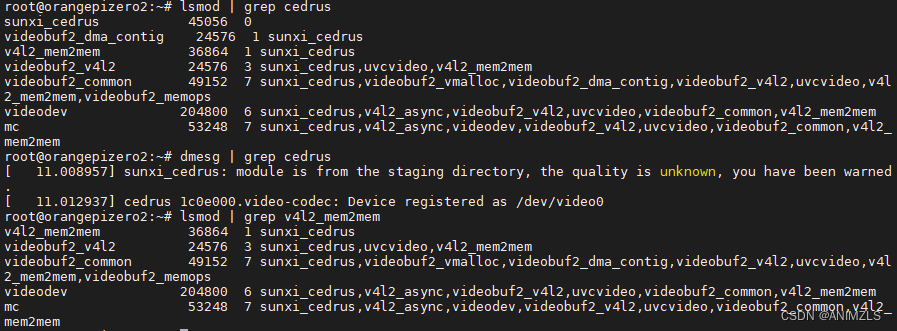
sudo modprobe v4l2_mem2memlsmod | grep cedrus
dmesg | grep cedrus
lsmod | grep v4l2_mem2memecho "sunxi-cedrus" | sudo tee -a /etc/modules #系统在启动时自动加载 sunxi-cedrus 模块
我们可以观察到,cedrus已在系统中成功注册,并注册为/dev/video0,并提醒驱动来自于 Linux 内核的“staging”目录,这意味着该模块可能还不完全稳定或经过充分测试。
对 Sunxi-Cedrus 的支持是通过内核空间或用户空间中的各种组件实现的:
- Cedrus V4L2 M2M 内核驱动程序
- v4l2 请求 VAAPI 后端
此外,还提供了其他用户空间组件,用于开发目的:
- v4l2-request-test 工具,允许测试 -Cedrus VPU 驱动程序
- libdrm-sun4i,支持以 VPU 使用的 MB32 平铺 NV12 格式分配缓冲区**(已弃用)**
- libva-dump VAAPI,允许从视频中转储元数据和切片
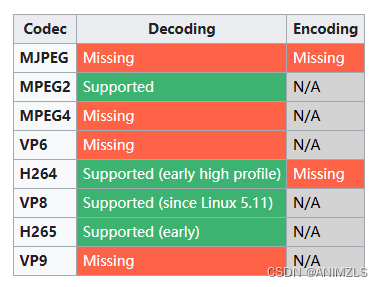
支持 libVA 的视频播放器应与 v4l2-request libVA 后端兼容。但是,实现中的某些细节可能会导致与某些播放器不兼容。
下表显示了 v4l2-request libVA 后端中特定编解码器的支持状态:
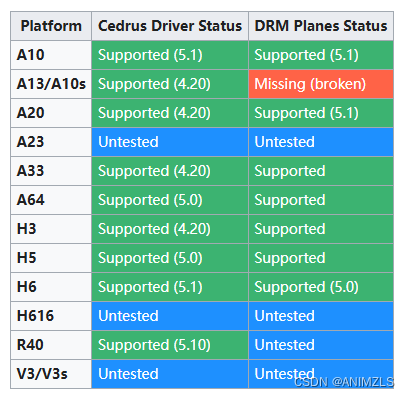
下表显示了对 V4L2 M2M 内核驱动程序中特定 SoC 的支持:
以下播放器使用 v4l2-request libVA 后端进行了测试:

采用Gstreamer工具进行硬件编解码的测试
安装Gstreamer和相关插件,加载必要模块
sudo apt update
sudo apt install gstreamer1.0-tools gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav
sudo apt install v4l-utils
gst-launch-1.0 --versionsudo modprobe videobuf2-core
sudo modprobe videobuf2-memops
sudo modprobe videobuf2-vmalloc
sudo modprobe videobuf2-v4l2
sudo modprobe v4l2-mem2mem
sudo modprobe sunxi-cedrus
查看H.264相关的编解码支持
gst-inspect-1.0 | grep 264root@orangepizero2:~# gst-inspect-1.0 | grep 264
libav: avdec_h264: libav H.264 / AVC / MPEG-4 AVC / MPEG-4 part 10 decoder
libav: avenc_h264_omx: libav OpenMAX IL H.264 video encoder encoder
libav: avmux_ipod: libav iPod H.264 MP4 (MPEG-4 Part 14) muxer
openh264: openh264dec: OpenH264 video decoder
openh264: openh264enc: OpenH264 video encoder
rtp: rtph264depay: RTP H264 depayloader
rtp: rtph264pay: RTP H264 payloader
typefindfunctions: video/x-h264: h264, x264, 264
uvch264: uvch264deviceprovider (GstDeviceProviderFactory)
uvch264: uvch264mjpgdemux: UVC H264 MJPG Demuxer
uvch264: uvch264src: UVC H264 Source
v4l2codecs: v4l2slh264dec: V4L2 Stateless H.264 Video Decoder
# v4l2slh264dec这是一个 V4L2 Stateless H.264 Video Decoder,用于硬件加速解码。
videoparsersbad: h264parse: H.264 parser
x264: x264enc: x264 H.264 Encoder
那么,可以先用本地mp4视频测试硬件解码,并将解码数据直接保存保存为原始 YUV 格式文件(例如 NV12 或 I420),我们可以看到v4l2-ctl显示了香橙派的/dev/video0设备支持的视频捕获格式
root@orangepizero2:~# v4l2-ctl --list-formats-ext -d /dev/video0
ioctl: VIDIOC_ENUM_FMTType: Video Capture[0]: 'ST12' (Y/UV 4:2:0 (32x32 Linear))[1]: 'NV12' (Y/UV 4:2:0)
利用Gstreamer解码本地命令
gst-launch-1.0 -v filesrc location=input.mp4 ! qtdemux ! h264parse ! v4l2slh264dec ! videoconvert ! video/x-raw,format=I420 ! filesink location=output.yuv
出现报错,从dmesg日志中可以看出,cedrus 视频编解码器在尝试分配 DMA 内存时失败了。这通常表示系统内存不足或者 DMA 分配失败。解码 H.264/H.265 视频可能需要大量的 CMA 内存,因此建议设置一个大型 CMA 池,例如使用内核命令行参数。例如,256 MiB 应该足以解码 1080p H.264 视频。
在/boot/orangepiEnv.txt中添加或修改如下行:
extraargs=cma=256M
接下来,我们尝试编码推流,但是我们发现Gstreamer工具中v4l2并没有适用硬件加速编码的支持。
先尝试软件编码推流,安装RTSP服务
sudo apt-get install gir1.2-gst-rtsp-server-1.0 libgstrtspserver-1.0-0 libgstrtspserver-1.0-dev
编写服务器推流代码,命名为 rtsp-server.c
#include <gst/gst.h>
#include <gst/rtsp-server/rtsp-server.h>int main(int argc, char *argv[]) {gst_init(&argc, &argv);GstRTSPServer *server = gst_rtsp_server_new();gst_rtsp_server_set_service(server, "8554");GstRTSPMountPoints *mounts = gst_rtsp_server_get_mount_points(server);GstRTSPMediaFactory *factory = gst_rtsp_media_factory_new();// 使用v4l2src从摄像头采集视频,并使用x264enc进行编码gst_rtsp_media_factory_set_launch(factory,"( v4l2src device=/dev/video1 ! video/x-raw,width=640,height=480 ! videoconvert ! video/x-raw,format=I420 ! x264enc tune=zerolatency profile=main ! rtph264pay name=pay0 pt=96 )");gst_rtsp_mount_points_add_factory(mounts, "/test", factory);g_object_unref(mounts);gst_rtsp_server_attach(server, NULL);g_print("stream ready at rtsp://192.168.137.189:8554/test\n");GMainLoop *loop = g_main_loop_new(NULL, FALSE);g_main_loop_run(loop);gst_object_unref(server);g_main_loop_unref(loop);return 0;
}
使用GCC编译器编译代码,链接GStreamer库。
gcc rtsp-server.c -o rtsp-server `pkg-config --cflags --libs gstreamer-1.0 gstreamer-rtsp-server-1.0`
./rtsp-server
这样就会启动RTSP服务器,并开始推流。你可以使用VLC或其他支持RTSP的媒体播放器来访问和观看流媒体。例如,在VLC中打开网络串流,输入RTSP流地址(比如 rtsp://192.168.137.189:8554/test),就可以观看视频流了。延时大概2秒左右,cpu占用率80%。
尝试ffmpeg工具进行硬件编解码的测试
- 安装 Cedrus 支持的第一步是构建一个具有驱动程序最新补丁系列的 Linux 内核。这一步香橙派已经替我们完成了。
- 支持 Cedrus VPU 驱动程序的主要用户空间组件是 libva-v4l2-request VAAPI 后端
git clone https://github.com/bootlin/libva-v4l2-request -b release-2019.03
cd libva-v4l2-request
./autogen.sh && make && sudo make install
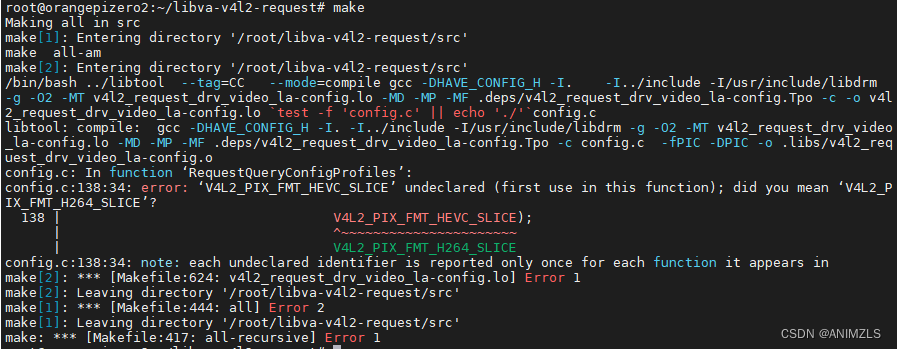
系统中缺少对应的定义,这可能是因为我的 V4L2 (Video4Linux) 头文件版本不支持 HEVC (High Efficiency Video Coding) 的相关功能。
config.c
/*found = v4l2_find_format(driver_data->video_fd,V4L2_BUF_TYPE_VIDEO_OUTPUT,V4L2_PIX_FMT_HEVC_SLICE);if (found && index < (V4L2_REQUEST_MAX_CONFIG_ATTRIBUTES - 1))profiles[index++] = VAProfileHEVCMain;
*/
context.c
case VAProfileHEVCMain://pixelformat = V4L2_PIX_FMT_HEVC_SLICE;pixelformat = V4L2_PIX_FMT_H264_SLICE;break;
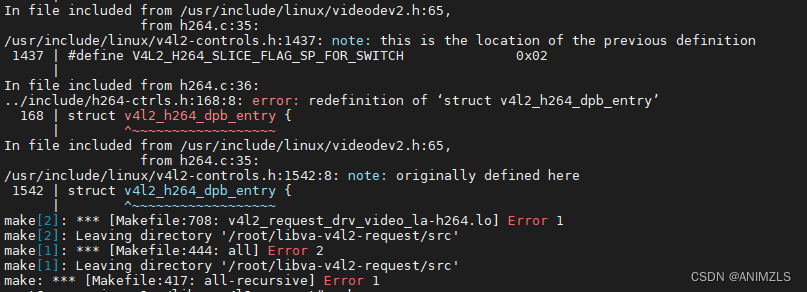
h264-ctrls.h
/*注释掉重复的结构体定义
struct v4l2_ctrl_h264_pps {__u8 pic_parameter_set_id;__u8 seq_parameter_set_id;__u8 num_slice_groups_minus1;__u8 num_ref_idx_l0_default_active_minus1;__u8 num_ref_idx_l1_default_active_minus1;__u8 weighted_bipred_idc;__s8 pic_init_qp_minus26;__s8 pic_init_qs_minus26;__s8 chroma_qp_index_offset;__s8 second_chroma_qp_index_offset;__u16 flags;
};struct v4l2_ctrl_h264_scaling_matrix {__u8 scaling_list_4x4[6][16];__u8 scaling_list_8x8[6][64];
};struct v4l2_h264_weight_factors {__s8 luma_weight[32];__s8 luma_offset[32];__s8 chroma_weight[32][2];__s8 chroma_offset[32][2];
};
*/
//修改v4l2_h264_dpb_entry
struct v4l2_h264_dpb_re_entry {__u64 timestamp;__u16 frame_num;__u16 pic_num;/* Note that field is indicated by v4l2_buffer.field */__s32 top_field_order_cnt;__s32 bottom_field_order_cnt;__u32 flags; /* V4L2_H264_DPB_ENTRY_FLAG_* */
};struct v4l2_ctrl_h264_decode_param {__u32 num_slices;__u16 idr_pic_flag;__u16 nal_ref_idc;__u8 ref_pic_list_p0[32];__u8 ref_pic_list_b0[32];__u8 ref_pic_list_b1[32];__s32 top_field_order_cnt;__s32 bottom_field_order_cnt;struct v4l2_h264_dpb_re_entry dpb[16];
};
h264.c
static void h264_fill_dpb(struct request_data *data,struct object_context *context,struct v4l2_ctrl_h264_decode_param *decode)
{int i;for (i = 0; i < H264_DPB_SIZE; i++) {struct v4l2_h264_dpb_re_entry *dpb = &decode->dpb[i];struct h264_dpb_entry *entry = &context->dpb.entries[i];struct object_surface *surface =SURFACE(data, entry->pic.picture_id);uint64_t timestamp;if (!entry->valid)continue;if (surface) {timestamp = v4l2_timeval_to_ns(&surface->timestamp);dpb->timestamp = timestamp;}dpb->frame_num = entry->pic.frame_idx;dpb->top_field_order_cnt = entry->pic.TopFieldOrderCnt;dpb->bottom_field_order_cnt = entry->pic.BottomFieldOrderCnt;dpb->flags = V4L2_H264_DPB_RE_ENTRY_FLAG_VALID;if (entry->used)dpb->flags |= V4L2_H264_DPB_RE_ENTRY_FLAG_ACTIVE;if (entry->pic.flags & VA_PICTURE_H264_LONG_TERM_REFERENCE)dpb->flags |= V4L2_H264_DPB_RE_ENTRY_FLAG_LONG_TERM;}
}

编译器在链接过程中找不到 tiled_to_planar 函数的定义,我们尝试手动编译和链接
sudo apt-get install --reinstall libtool-bin
root@orangepizero2:~/libva-v4l2-request# libtool --mode=compile gcc -c src/tiled_yuv.S -o src/tiled_yuv.lolibtool: compile: gcc -c src/tiled_yuv.S -fPIC -DPIC -o src/.libs/tiled_yuv.o
libtool: compile: gcc -c src/tiled_yuv.S -o src/tiled_yuv.o >/dev/null 2>&1
root@orangepizero2:~/libva-v4l2-request#
make编译依然失败,查看tiled_yuv.S汇编源文件,发现是针对 ARMv7 架构的汇编代码,需要改为适合 aarch64 架构的汇编代码。
这篇关于全志H616 通过Cedrus和v4l2_request API实现硬件编解码加速(香橙派zero2)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





