urban专题
Building3D An Urban-Scale Dataset and Benchmarks 论文阅读
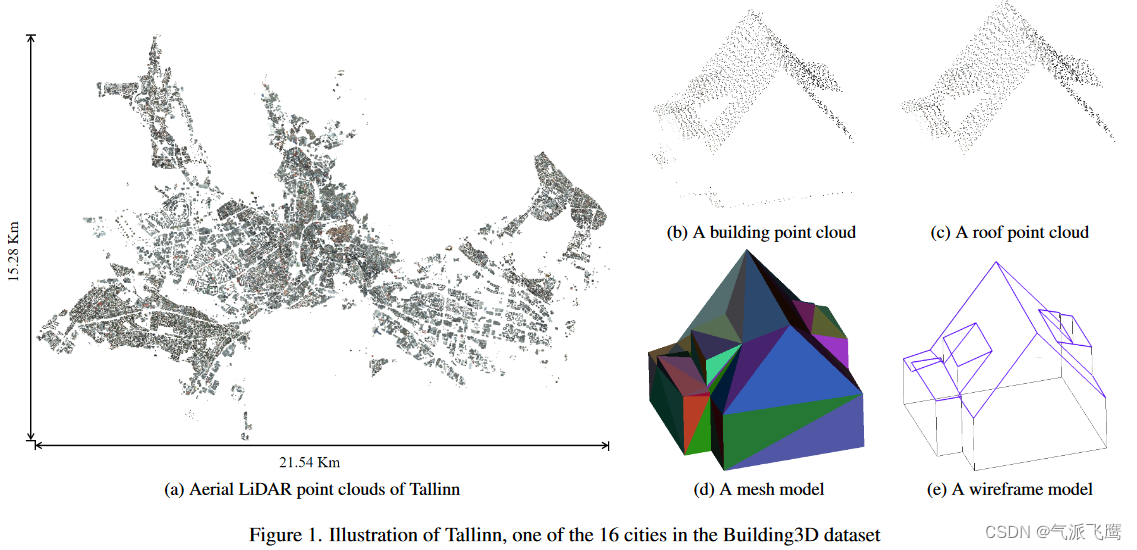
文章主页 Building3D 任务 提出了一个城市规模的数据集,由超过 16 万座建筑物以及相应的点云、网格和线框模型组成,覆盖爱沙尼亚的 16 个城市,面积约 998 平方公里。 动机 现有的3D建模数据集主要集中在家具或汽车等常见物体上。缺乏建筑数据集已成为将深度学习技术应用于城市建模等特定领域的主要障碍。 要点 数据集包含原始点云,建筑物点云,屋顶点云,以及网格模型和线框模
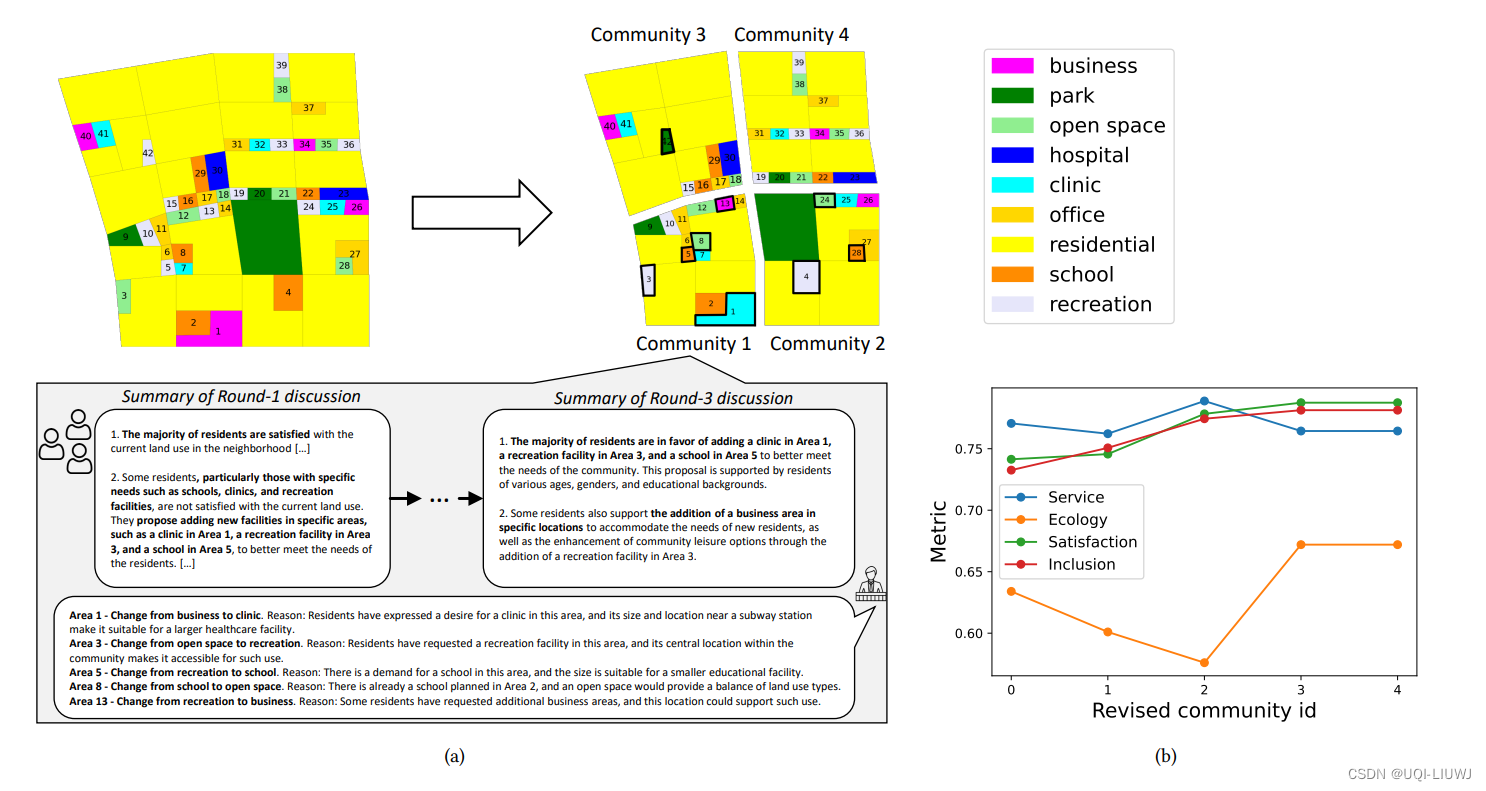
论文笔记:Large Language Model for Participatory Urban Planning
202402 arxiv 大模型+城市规划 引入了一个基于LLM的多代理协作框架,模拟规划师和数千名具有不同特征和背景的居民,用于参与式城市规划——>生成考虑居民多样化需求的城市区域土地利用规划为了提高讨论的效率,论文采用了鱼缸讨论机制,其中部分居民讨论,其余的居民在每一轮中充当听众 1 方法 1.1 总体方法 1.2 鱼缸讨论机制 1.3 planner的prompt和回答

例题5-12 城市正视图(Urban Elevations,ACM/ICPC World Finals 1992,UVa221)
原题链接:https://vjudge.net/problem/UVA-221 分类:<algorithm> 备注:离散化 前言:我也不太清楚刘老师为什么说这题是离散化,我想可能是用到集合的东西吧,区间完全包含于建筑的区间或者交集为空,这都是离散的知识。 但是把无限变为有限是很有用的一种思想! 本题我确实借鉴了VJ中Praying的评论中的代码,所以会很像! 代码如下: #include<se

Urban Elevations(UBA-211)
网址如下: Urban Elevations - UVA 221 - Virtual Judge (vjudge.net) 第三方网站的 说实话,我看英语看得头大 最近学了一堆stl的容器,比如map,set啥的,方便是很方便,但是导致我脑子里第一个念头就是用他,思维有点局限了 我的代码如下: #include<vector>#include<cstdio>#include

《How friends share urban space: An exploratory spatiotemporal analysis using mobile phone data》 个人解读
城市空间分享的探索性时空分析 前段时间有意识的去搜集关于学术可视化方面的知识,注意到了麻省理工学院可感知城市实验室的官网,引起了我很大的兴趣,随着一段时间的了解和关注,它成了我个人在可视化领域最喜欢的一个实验室,这个实验室通过可视化设计和科学分析实现城市的想象力和社会的变革创新。实验室主页上展示了从2004——2018年的实验室项目,几乎每一项都有实际城市数据的验证,或者是基于某个发达城市的真实

3DGS 其二:Street Gaussians for Modeling Dynamic Urban Scenes
3DGS 其二:Street Gaussians for Modeling Dynamic Urban Scenes 1. 背景介绍1.1 静态场景建模1.2 动态场景建模 2. 算法2.1 背景模型2.2 目标模型 3. 训练3.1 跟踪优化 4. 下游任务 Reference: Street Gaussians for Modeling Dynamic Urban Sce
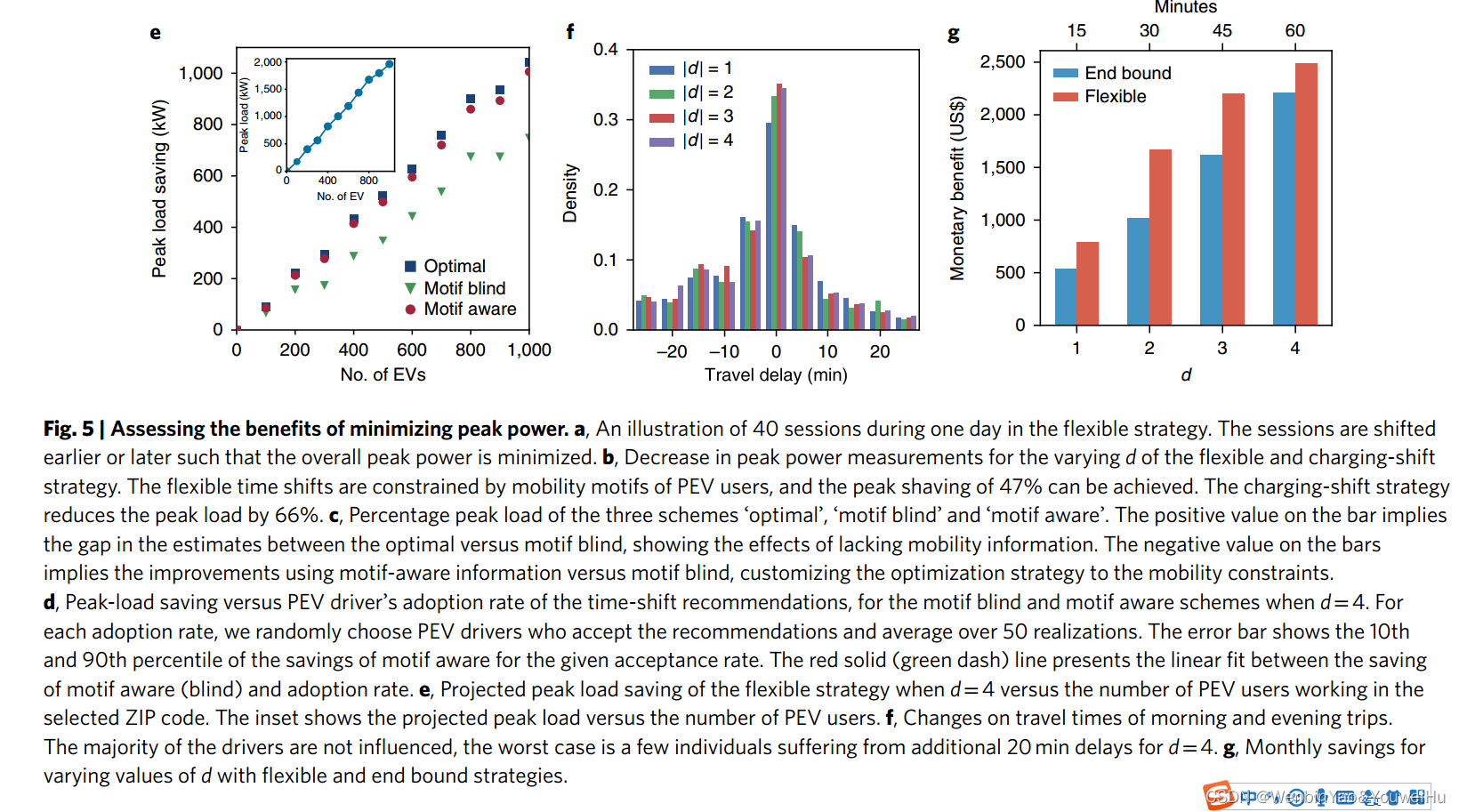
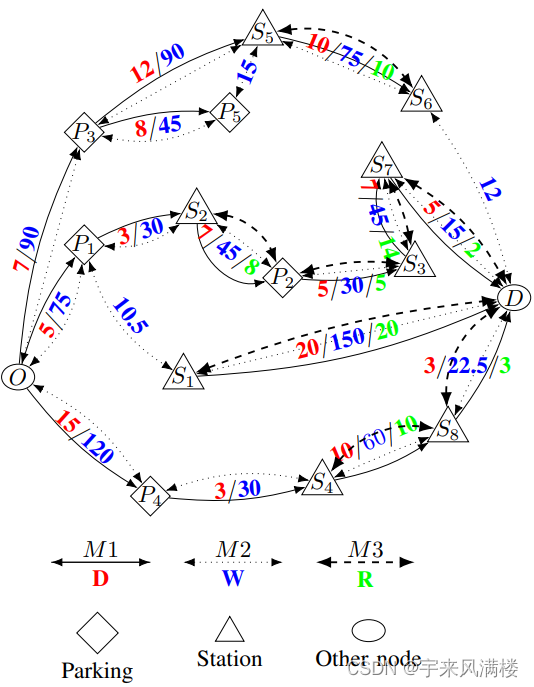
Planning for electric vehicle needs by coupling charging profiles with urban mobility
这是发表在nature energy上的一篇论文,相当牛的期刊,相当牛的论文,花了两天看了下,在此就慢慢解读记录下。 1.文章概述 论文主要是分析了电动汽车充电问题,也就是说现在电动车越来越多,这些电动车一起充电,将会带来一个用电高峰,这个高峰可能会使得区域供电系统不稳定,甚至崩溃,因此作者希望能够降低峰值用电情况,解决这个问题的办法很自然地想到是错峰用电,这样就可以减小用电峰值了,但是如何错

Urban Elevations UVA - 221——个人见解
An elevation of a collection of buildings is an orthogonal projection of the buildings onto a vertical plane. An external elevation of a city would show the skyline and the faces of the “visible” bu
![论文笔记009:[ECCV2016]A Deep Learning-Based Approach to Progressive Vehicle Re-identification for Urban](https://img-blog.csdnimg.cn/0cf89bb084664cc794080a2e5596fc59.png?x-oss-process=image/watermark,type_ZHJvaWRzYW5zZmFsbGJhY2s,shadow_50,text_Q1NETiBAQ29kZXJfTDI=,size_18,color_FFFFFF,t_70,g_se,x_16)
论文笔记009:[ECCV2016]A Deep Learning-Based Approach to Progressive Vehicle Re-identification for Urban
摘要 在行人重识别(Re-Id)日益受到关注的同时,车辆作为城市视频监控中重要的对象类别,却常常被视觉界所忽视。引出问题 现有的车辆重识别方法大多只关注车辆的一般外观,而忽略了车辆的某些独特身份(如车牌),因此识别效果有限。本文提出了一种新的基于深度学习的渐进式车辆再识别方法PROVID。我们的方法将车辆的Re-Id视为两个特定的渐进式搜索过程:特征空间中的粗到细搜索和现实世界监控环境中
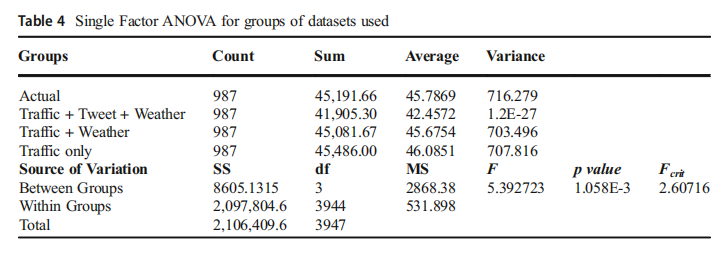
【论】A deep-learning model for urban traffic flow prediction with traffic events mined from twitter
A deep-learning model for urban traffic flow prediction with traffic events mined from twitter 原文,见这里 作者:Aniekan Essien & Ilias Petrounias & Pedro Sampaio & Sandra Sampaio 期刊: 关键字:交通流量预测。LSTM堆叠式自动编码器

Complex urban dataset with multi-level sensors from highly diverse urban environments
文章目录 传感器构成传感器标定和数据格式轨迹真值的估计和配套开发工具 构建了多传感器,多环境,且环境具有动态特性的数据集。数据集地址:https://irap.kaist.ac.kr/dataset/ 传感器构成 数据采集车辆搭载了2D/3D激光,双目相机,IMU,FOG,里程计和GPS等不同精度的多种传感器。比较有特色的是,激光不是水平而是斜向放置,通过斜向放置来扩
城市正视图(Urban Elevations, ACM/ICPC World Finals 1992, UVa221)rust解法
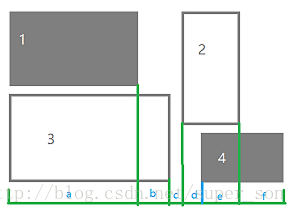
如图5-4所示,有n(n≤100)个建筑物。左侧是俯视图(左上角为建筑物编号,右下角为高度),右侧是从南向北看的正视图。 输入每个建筑物左下角坐标(即x、y坐标的最小值)、宽度(即x方向的长度)、深度(即y方向的长度)和高度(以上数据均为实数),输出正视图中能看到的所有建筑物,按照左下角x坐标从小到大进行排序。左下角x坐标相同时,按y坐标从小到大排序。输入保证不同的x坐标不会很接近(即任意两个x